Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
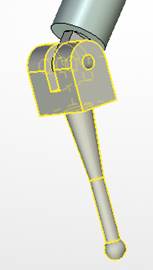
Фрагменты 9,10,11: «оси» файл «оси. Grs»
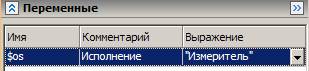
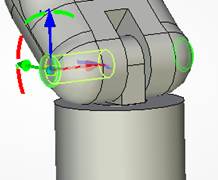
Эти фрагменты добавляются в осевые отверстия соответствующих кинематических соединений модели механизма. При добавлении фрагмента «Оси» в отверстия элементов кинематических пар звеньев (фрагментов) «Колено» - «Шарнир 1» или «Колено» - «Oсь 2» в качестве значения текстовой переменной $os из выпадающего списка в меню свойств следует выбрать «Колено», а при добавлении в соответствующие отверстия кинематического соединения звеньев (фрагментов) «Измеритель» - «Шарнир 2» из этого списка в меню свойств следует выбрать «Измеритель». Ось Z направляется вдоль оси соответствующих отверстий (таблица 8). Фрагмент «ОСИ» также выполнен параметрически, поэтому при вставке следует выбрать значение переменной
Таблица 8 - Добавление фрагментов «Оси.grs»
Поздравляю! Вы собрали Вашу модель манипулятора измерительной системы ARM. Теперь задействовав механизм перемещения сопряженных элементов (нажав кнопку
СОПРЯЖЕНИЯ Сопряжения как элементы системы T-FLEX CAD, позволяющие назначить различные связи на геометрические объекты (3D точки, оси, кривые, плоскости и поверхности) двух операций-компонентов [1] следует отличать от «сопряжения» из терминологии, используемой в теории механизмов и машин. Согласно последней: «Сопряжение – кинематическая пара, в которой твердые тела соприкасаются непосредственно между собой». Сопряжения как элементы системы T-FLEX CAD более широкое понятие, подразумевающее моделирование отношений не только твердых тел по их элементам (вершинам, ребрам и граням), но и таких абстракций, как «точка», «ось», «кривая», «плоскость» и «поверхность». Это обстоятельство, безусловно, расширяет программные возможности T-FLEX CAD, и позволяет адекватно моделировать твердотельные механические системы, например, рассмотренный выше манипулятор.
Использование сопряжений требует дополнительных вычислительных ресурсов компьютера для поисков решений. В связи с этим прибегать к использованию сопряжений рекомендуется, когда другие способы для решения упомянутых задач по тем или иным причинам не подходят. Метод позиционирования деталей сборки при помощи сопряжений может быть использован как дополнительный способ привязки, совместно с использованием привязки по локальным системам координат (ЛСК). Как мы уже убедились, механизм реализации привязки 3D фрагмента по локальной системе координат позволяет задавать дополнительные условия в виде разрешенных степеней свободы. При этом следует иметь в виду, что пространственная сборочная модель рассматриваемого механизма, собранная с использованием сопряжений представляет сложную вычислительную систему, характеризующуюся определенной скоростью и стабильностью работы. На эти параметры в первую очередь влияет уровень сложности системы сопряжений, используемых в пространственной сборочной модели механизма, а также количество и пространственная геометрия элементов сборки – звеньев механизма. Сложность системы сопряжений определяется количеством и разновидностью используемых сопряжений. В связи с этим, моделирование кинематических пар в рассмотренном построении сборочной параметрической модели манипулятора основано на использовании разрешенных степеней свободы T-FLEX CAD, а исключение взаимопроникновений тел (моделирование твердых тел механической системы) выполним на основе сопряжений T-FLEX CAD.
СОПРЯЖЕНИЕ 1 Первые два сопряжения обеспечивают взаимное непроникновение друг в друга первого колена (фрагмент 3) и стойки (фрагмент 1). Для создания первого сопряжения нажмите кнопку 1. В окне «Свойства» выберите тип сопряжения 2. Нажимайте на кнопку 3. В автоменю нажмите кнопку
4. В автоменю нажмите кнопку 5. Нажмите кнопку 6. Нажмите кнопку
Таблица 9 - Создание сопряжения «Расстояние»
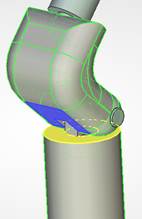
СОПРЯЖЕНИЕ 2 Это сопряжение создается аналогично предыдущему, но в качестве второго операнда (листового тела) выбирается противоположная грань колена (таблица 10). Таблица 10 - Создание второго сопряжения «Расстояние»
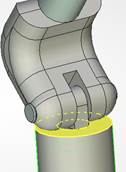
СОПРЯЖЕНИЕ 3 Благодаря этому сопряжению измеритель (фрагмент 8) и ось 2 (фрагмент 6) не должны проникали друг в друга. Для создания этого сопряжения нажмите кнопку 1. В окне «Свойства» выберите тип сопряжения 2. Нажимайте на кнопку 3. В автоменю нажмите кнопку 4. В автоменю нажмите кнопку 5. Нажмите кнопку 6. Нажмите кнопку Таблица 11 - Создание третьего сопряжения «Расстояние»
Аналогично создаются сопряжения, позволяющие исключать взаимопроникновения остальных твердых тел сборочной модели манипулятора. Вместе с тем, уже созданных трех сопряжений в большинстве положений вполне достаточно для решения задач позиционирования измерительной системы.
|
||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2020-11-23; просмотров: 218; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.134.81.206 (0.009 с.) |
 (таблица 8, Целевая СК1) либо
(таблица 8, Целевая СК1) либо 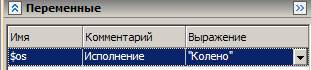 (таблица 8, целевая СК2) в зависимости от того, в какой фрагмент вставляется ось.
(таблица 8, целевая СК2) в зависимости от того, в какой фрагмент вставляется ось.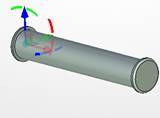

 ) можно изучать возможности этой измерительной машины. Однако уже после непродолжительных экспериментов становится ясно, что в параметрической модели при перемещении звеньев (сопряженных элементов) часто наблюдается их взаимопересечение, проникновение тел одних звеньев в тела других. Избавиться от такого недостатка позволяет добавление сопряжений с помощью механизма сопряжений TFLEX CAD.
) можно изучать возможности этой измерительной машины. Однако уже после непродолжительных экспериментов становится ясно, что в параметрической модели при перемещении звеньев (сопряженных элементов) часто наблюдается их взаимопересечение, проникновение тел одних звеньев в тела других. Избавиться от такого недостатка позволяет добавление сопряжений с помощью механизма сопряжений TFLEX CAD. (вызов команды «Создать сопряжение») на стандартной панели инструментов T-FLEX CAD и:
(вызов команды «Создать сопряжение») на стандартной панели инструментов T-FLEX CAD и: ;
; пока она не примет вид
пока она не примет вид  ;
; (Выбор плоскости) и укажите на грань (таблица 9) или одно из двух ребер верхнего торца основания (фрагмент 1);
(Выбор плоскости) и укажите на грань (таблица 9) или одно из двух ребер верхнего торца основания (фрагмент 1); (Выбор листового тела) и выберите грань (таблица 9) колена (фрагмента 3), которая в соответствующей физической модели колена упирается в верхний торец основания в крайнем положении колена;
(Выбор листового тела) и выберите грань (таблица 9) колена (фрагмента 3), которая в соответствующей физической модели колена упирается в верхний торец основания в крайнем положении колена; (Закончить ввод);
(Закончить ввод);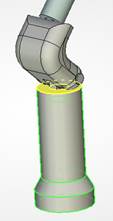

 (вызов команды «Создать сопряжение») на стандартной панели инструментов T-FLEX CAD и:
(вызов команды «Создать сопряжение») на стандартной панели инструментов T-FLEX CAD и: ;
; (Выбор твердого тела) и укажите на измеритель (таблица 11) (фрагмент 8);
(Выбор твердого тела) и укажите на измеритель (таблица 11) (фрагмент 8); и проверьте, как действует созданное сопряжение.
и проверьте, как действует созданное сопряжение.