Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Instrument Landing System (ILS).Содержание книги
Поиск на нашем сайте
ILS is a radio beam system designed to provide the pilot with precise guidance from an elevated point in space down to a selected runway. The ILS consists of three distinct elements, each of which requires ground transmitters and airborne receivers: (i) Localiser Provides lateral steering signals for front-course and back- course approaches to the runway. (ii) Glide Path Provides vertical steering signals for landings in one direction (the front course) on the runway. (iii) Marker Provide spot-checks of position at pre-determined distances Beacons from the threshold of the runway. A typical ILS pattern is shown in figure 12.34 Fig. 12.34. INSTRUMENT LANDING SYSTEM
The system is allocated 40 VHF localiser channels, spaced 50 kHz apart, in the frequency range of 108,10 to 111.95 MHz and 40 corresponding UHF glidepath channels in the frequency range of 329.15 to 335.00 MHz, spaced 150 kHz apart. The glidepath frequencies are paired with the localiser frequencies as shown in table 1.
TABLE 1 LOCALISER AND GLIDEPATH PAIRED FREQUENCIES
When a localiser frequency is selected on the Nav control panel, the corresponding glidepath frequency is also selected. Localiser The localiser is the lateral guidance portion of the ILS. 40 channels are provided at the odd tenth MHz from 108.1 to 111.9 MHz. Each localiser frequency being paired with a glidepath frequency. The localiser transmitter is situated at the end of the runway with its aerial aligned with the centreline. The transmitter radiates a horizontally polarised signal, amplitude modulated, to the left of the centreline by a 90 Hz tone and to the right by a 150 Hz tone. The percentage of modulation by each tone is 20%. The coverage limit within 10° of the front course line is 25 nautical miles at a height of 2000 feet. The coverage limit for the back course line is about 10 nautical miles. There is a third amplitude modulation of 1020 Hz (or voice) for identification.
The amplitude modulated output at 90 Hz and 150 Hz is fed to a complex aerial array. The resultant RF field pattern is such that, at all positions along the extended centre line of the runway, an aircraft receiver observes a RF carrier modulated to an equal depth (of 20%) of the 90 Hz and 150 Hz tones. Along this line the difference in depth of modulation is zero. On either side of the centre line the difference in depth of modulation between the two tones is proportional to the angular displacement. During a normal front course approach 90 Hz modulation is predominate to the left and 150 Hz predominate to the right. Fig. 12.36. LOCALISER DIFFERENCE IN DEPTH OF MODULATION
The ILS localiser course sector is nominally 700 feet wide at the threshold of the runway. The ILS localiser is adjusted so that the difference in depth of modulation is 15.5% at points 350 feet each side of the centreline at the runway threshold. A difference in depth of modulation of 15.5% detected by an aircraft localiser receiver produces an output of 150 microamps to each course indicator, which then shows a full scale deflection left or right. The variation or difference in depth of modulation with respect to angular displacement from the course line is linear from 0 to 18% DDM, corresponding to angles 0 to 3° off course. At greater angles the difference in depth of modulation is maintained above 15.5% so that the aircraft course indicator never indicates less than full scale deflection outside the course sector.
The back course, at 180°, allows the localiser to be used for landing in a direction opposite to the front course, although without a glideslope and with reversed needle indications. The ICAO requires that for Category II landings, within the last 3500 feet preceding the threshold, the localiser beam bends less than 0.005 difference in depth of modulation, corresponding to 15 feet, 0.07° off course and 5 microamps at the indicator. Glide Path The glide path is the vertical guidance portion of the ILS. Forty glide path channels from 329.3 to 335.0 MHz are spaced 150 kHz apart, and each is paired with a localiser frequency. The glide path transmitter is situated at the side of the runway approximately adjacent to the touch down point. The transmitter radiates a horizontally polarised signal amplitude modulated above the glide path by a 90 Hz tone and below by a 150 Hz tone. The percentage of modulation by each tone is 40 %. The coverage limit is 10 nautical miles and the glide path signal defines a straight line approach path at an angle between 2.5 and 3.5° above the horizontal. Two or more aerials are used to produce the composite RF field pattern. This pattern provides a descent path along which the RF carrier is modulated to an equal depth, of 40%, by the 90 Hz and 150 Hz tones. Along this glide path the difference in depth of modulation is zero.. On either side of the glide path, the difference in depth of modulation between the two tones is proportional to angular displacement.
Fig. 12.37. GLIDE PATH RADIATION PATTERN
A difference in depth of modulation of 17.5% detected by a receiver produces an output of 150 microamps corresponding to a full scale deflection of 0.75° above or below the glide path. The ILS Marker Beacons will be described separately.
Fig. 12.38. GLIDE PATH DIFFERENCE IN DEPTH OF MODULATION
Localiser Receiver The localiser receiver is essentially a VHF receiver in the frequency band 108.10 to 111.95 MHz with 50 kHz spacing. In the receiver, the amplitude modulation of the localiser carrier is detected and filtered into its 90 Hz, 150 Hz and audio frequency components. The audio frequencies are amplified to allow identification of the transmitter by the Morse code ident at 1020 Hz. The 90 Hz and 150 Hz tones are amplified, rectified and compared in amplitude by a comparator circuit which controls the left/right pointer of a deviation indicator.
Fig. 12.39. LOCALISER RECEIVER The circuit is adjusted to give zero output for a receiver RF input which is modulated to a depth of 20% by each of the two tones. This corresponds to zero difference in depth of modulation, the on-course condition. A flag alarm circuit is included in the receiver to warn the pilot of any malfunction. The flag is usually operated by a moving coil mechanism. The current which is obtained is the sum of the rectified 90 Hz and 150 Hz tones producing 250 microamps. The flag remains out of view as long as these currents are maintained. Glide Path Receiver The glide path receiver is essentially a UHF receiver in the frequency band 328.6 to 335.4 MHz with 150 kHz spacing between channels. The 90 Hz and 150 Hz tones detected from the carrier are amplified, rectified and compared in amplitude by a comparator circuit which controls the up/down pointer of a deviation indicator. The circuit is adjusted to give zero output for a receiver RF input which is modulated to a depth of 40% by each of the two tones. This corresponds to zero difference in depth of modulation, the on-glide path condition and the pointer is centred on the scale.
The flag circuit operates the same as in the localiser receiver. Fig. 12.40. GLIDE PATH RECEIVER Amplitude Comparator Since the localiser and glide path receivers are very similar, one general block diagram will be used (figure 12.41.). With normal RF signal strength the receiver AGC maintains the carrier signal at a constant level. The detected 90 Hz and 150 Hz components are therefore directly proportional to the respective depths of modulation. The signal is amplified by an audio amplifier and applied to 90 Hz and 150 Hz pass filters that separate the frequencies. Each frequency is rectified by a bridge rectifier and a positive dc voltage is developed which is directly proportional to the depth of modulation of the input signal. Fig. 12.41. AMPLITUDE COMPARATOR DEFLECTION CIRCUIT
An input signal that has equal depths of modulation for 90 Hz and 150 Hz modulations would develop a positive dc voltage out of each rectifier and the voltages would be equal. The rectifier output voltages are applied to a meter movement which is a zero centre micro-ampere meter and requires 150 microamps for full scale deflection. When the voltages on both sides of the meter are of the same polarity and the same magnitude, there is no difference in potential across the meter and therefore no current flows through the meter and the meter will remain centre zero. When one signal is greater than the other, one output voltage from the rectifiers is greater than the other and a potential difference exists across the meter. The magnitude of the potential difference depends on the difference between the 90 Hz and 150 Hz signals. The greater the potential difference, the greater the deflection of the meter pointer. The resistor marked flag adjust is common to both rectifiers and the current through the resistor is the sum of the currents produced by the two rectifiers. Since the current from either rectifier is proportional to the audio voltage applied to the rectifier and the audio is proportional to the depth of modulation. The total current through this resistor is therefore proportional to the sum of the two currents and is labelled flag current. The meter movement connected across the flag adjust resistor responds to changes in current through the flag adjust resistor. This is a 1000 ohm movement that actuates a flag which is in view until the movement reaches a predetermined value. A flag condition known as Peeping Flag, where the flag is almost hidden by a mask, occurs with 240 microamps of current. When the flag is in view, it indicates to the pilot that the RF field strength or total modulation is not sufficient to provide valid deflection readings. A diagram of the rectifiers and meter movement is shown in figure 12.42. Fig. 12.42. COMPARATOR AND INDICATOR MOVEMENT The current resulting from the voltage developed across the 150 Hz rectifier flows through R1? R2 and the deviation indicator meter to deflect the deviation bar to the left and produce a positive voltage at P1. Current resultant from the voltage developed across the 90 Hz rectifier flows through the deviation indicator meter to deflect the deviation bar to the right and produce a positive voltage at P2. The failure warning flag is supplied with the sum of the deviation bar operating currents and remains out of view so long as these currents are maintained. Localiser Aerial The localiser aerial is designed to receive very high frequency radio signals between 108 and 112 MHz. A typical localiser aerial is shown in figure 12.43.
Fig. 12.43. LOCALISER AERIAL
The aerial is a horizontally polarised half-wave folded dipole and has a characteristic impedance of 50 ohms. It exhibits a VSWR of 2: 1 or less over the localiser frequency range. Glide Path Aerial The glide path aerial is designed to receive ultra high frequency radio signals between 329 and 335 MHz. A typical glide path aerial is shown in figure 12.44.
Fig. 12.44. GLIDE PATH AERIAL
The glide path aerial is a horizontally polarised half wave folded dipole and has a characteristic impedance of 50 ohms. It exhibits a VSWR of 2: 1 or less over the glide path frequency range. Glide path aerials are smaller than localiser aerials since they operate in the UHF band.
Маркерный канал. Маркерные радиомаяки работают на частоте 75 МГц и располагаются вдоль продолжения оси ВПП со стороны захода самолета на посадку. По международным стандартам устанавливаются два или три радиомаяка. При установке трех радиомаяков несущая частота ближнего к ВПП маяка модулируется частотой 3000 Гц, среднего - частотой 1300 Гц и дальнего - частотой 400 Гц. Глубина модуляции составляет (95±4) %. Для опознавания маркерных радиомаяков, помимо разных частот модуляции, применяется различная манипуляция модулирующих частот: - для ближнего маяка - шесть точек в секунду непрерывно; - для среднего маяка - непрерывная последовательность чередующихся точек и тире, причем тире чередуются со скоростью два тире в секунду, точки - со скоростью шесть точек в секунду; - для дальнего маяка - два тире в секунду непрерывно. В системе СП-50 используются два маркерных радиомаяка - средний и дальний. Модулирующие частоты обоих маркерных маяков 3000 Гц.
Манипуляция несущей частоты производится таким же образом, как и в маяках ILS.
Рис.12.45. ДН антенны РММ.
Рис. 12.46. Функциональная схема маркерного приемника.
Рис. 12.47. Расположение МРМ.
Marker Beacon System. The Marker Beacon System indicates to the flight crew that the aircraft is passing directly over a particular geographical location (such as a point along an air route) or points along an instrument landing path. The system provides both audio and visual indications of passage over any marker beacon transmitter. All marker beacons radiate a 75 MHz RF signal modulated with either a 400, 1300 or 3000 Hz audio. A narrow pattern is radiated upwards from the ground, with little horizontal strength, so that interference between marker beacons is negligible. There are two types of marker beacon transmitters, ILS Markers and Airways Markers. ILS Markers The ILS marker beacons are provided along the glide path as distance spot- checks. Each beacon radiates a fan-shaped vertical beam which is approximately ± 40° wide along the glide path by ± 85° wide perpendicular to the path. Figure 12.48 shows the location of the ILS marker beacons from the end of the runway. FAN MARKERS
Fig. 12.48 ILS MARKER BEACONS
The output power of each ILS marker beacon is 3 W and the carrier frequency is 75 MHz. Modulation of the carrier is either a 400, 1300 or 3000 Hz audio tone dependent on the marker and the depth of modulation is 95%. Each beacon radiates a horizontally polarised RF signal. The outer marker is located approximately 4 miles (6.4km) from the runway threshold. The RF signal is modulated by a 400 Hz tone keyed two dashes per second. As the aircraft passes over this marker, a blue light illuminates and the 400 Hz tone keyed as continuous dashes is heard in the headphones. The middle marker is located approximately 3500 feet from the runway threshold. The RF signal is modulated by a 1300 Hz tone keyed alternate dots and dashes. As the aircraft passes over this marker, an amber light illuminates and the 1300 Hz tone keyed as alternate dots and dashes is heard in the headphones. The inner marker, when installed, is located 250 feet from the runway threshold. The RF signal is modulated by a 3000 Hz tone keyed six dots per second. As the aircraft passes over this marker, a white light illuminates and the 3000 Hz tone keyed as continuous dots is heard in the headphones. The back course marker, if installed, is located at the opposite end of the runway from the inner marker also has a 3000 Hz tone and turns on the white light but the tone is keyed as continuous paired dots. By monitoring the lights and headphones the flight crew are able to mark progress on final approach to the runway. Fig. 12.49. AIRWAYS MARKERS Airways Markers When the maker beacons are used as airway identifiers, the 3000 Hz tone is used and the white light illuminates when the aircraft passes over the beacon. The tone is keyed with a Morse code identifier. The specific code is obtained from airways charts. The transmitter power is typically 100 W to ensure lamp operation in an aircraft at any operating altitude. Marker Beacon Receiver The marker beacon receiver processes signals from a ground station and provides visual and aural signals to indicate passage over the ground beacon. A typical receiver is shown in figure 12.50. Fig. 12.50. MARKER BEACON RECEIVER The marker beacon receiver is fixed tuned to receive 75 MHz amplitude modulated signals. The 75 MHz incoming signal from the aerial is applied through a selective LC filter to a crystal controlled converter where it is mixed with a local oscillator signal to generate an intermediate frequency (IF) signal. This IF signal is filtered and amplified before being applied to the detector stage where the audio component (400, 1300 or 3000 Hz) is detected. The detected signal is amplified in the audio amplifier, the output of which divides and drives the audio power amplifier and the audio lights drive. The output signal from the audio power amplifier is fed through an output transformer to the headphones for aural monitoring of the marker beacon system. Audio output from the audio light driver is fed through a three-stage frequency selective filter which separates the audio into its 400, 1300 or 3000 Hz components which turn-on the corresponding marker beacon lights.
Marker Beacon Sensitivity Switch The sensitivity and automatic gain control of a marker receiver are important in determining the period of time during which a visual indication is obtained when flying over a marker beacon. A switch is provided to allow the pilot to adjust the sensitivity of the marker beacon receiver. MARKER HIGH
LOW
Fig. 12.51. MARKER BEACON SENSITIVITY SWITCH
The HIGH sensitivity setting is used at high altitudes and the LOW sensitivity setting is used at low altitudes. The changeover is often made at 10,000 feet. On LOW sensitivity, the aerial input required to light the marker lamps is typically 10 dB greater than on HIGH sensitivity. Marker Beacon Lights The marker beacon lights receive dc power from the marker beacon receiver. The 400 Hz outer marker signal turns on the Blue lamp. The 1300 Hz middle marker signal turns on the Amber lamp. The 3000 Hz inner/airways marker signal turns on the White lamp. Each light assembly indicator cap is provided with an iris for brightness control. Fig. 42 MARKER BEACON LIGHTS Marker Beacon Aerial The marker beacon aerial is designed to receive a horizontally polarised 75 MHz signal from the marker ground transmitter. The aerial is a blade type unit usually mounted on the bottom centreline of the aircraft. Fig. 43 MARKER BEACON AERIAL 12.12. Навигационно - посадочная аппаратура " КУРС МП -70". Подробно рассматривается в [2] рекомендуемой литературы. Общие сведения Аппаратура "Курс МП-70" предназначена для обеспечения полетов самолетов по сигналам радиомаяков VOR, выполнения предпосадочных маневров и заходов на посадку по сигналам зарубежных посадочных радиомаяков ILS и отечественных радиомаяков СП-50 – СП-70.
Эксплуатационно-технические характеристики. 1. Количество навигационных каналов......... 160 2. В режиме VOR (по каналу курса): диапазон частот, МГц.............................. 108,00—117,25 стабильность частоты, % не хуже............ 0,0035 погрешность курса по каналу следящей системы, град, не более.......... 1,5 3. Количество посадочных каналов.............. 40 4. В режиме ILS (по каналу курса): диапазон частот, МГц.............................. 108,00—111,95 стабильность частоты, %, не хуже........... 0,0035 5. В режиме ILS (по глиссадному каналу): диапазон частот, МГц.............................. 329,15—335,5 стабильность частоты, %, не хуже........... 0,0035 6. В режиме СП-50 (по каналу курса): рабочие частоты, МГц........... 108,3; 108,7; 109,1; 109,5; 109,9; 110,3 7. В режиме СП-50 (по глиссадному каналу): рабочие частоты, МГц............................. 332,6; 333,8;335,0 8. Маркерный приемник: чувствительность в режиме «Маршрут», мВ: не хуже................................................. 0,2 чувствительность в режиме «Посадка», мВ 1+40 % несущая частота, МГц............................. 75 + 0,01 % частота модуляции: дальнего радиомаяка, Гц..................... 400 ± 10 среднего радиомаяка, Гц..................... 1300 + 32,5 ближнего радиомаяка и радиомаяка трассового, Гц..... 3000 ± 75
Аппаратура "Курс МП-70" является радиотехническим средством метрового диапазона волн, состоящим из устройств приема и обработки информации и преобразования еe в сигналы: отклонения самолета от линии заданного курса отклонения самолета от линии глиссады снижения соответствующие азимуту радиомаяка VOR; соответствующие курсовому углу радиомаяка; индикации направления полета "НА" или "ОТ" радиомаяка VOR; индикации пролета маркерных радиомаяков; опознавания радиомаяка. Краткие сведения о назначении блоков аппаратуры. Основным блоком аппаратуры является навигационно-посадочное устройство (УНП), решающее задачи приема сигналов курсовых и глиссадных маяков, выделения и обработки информации и самоконтроля.
Выпрямитель В-502 обеспечивает питание блоков напряжением 27 В и вырабатывает напряжение 36 В 400 Гц для УНП. Маркерный приемник РПМ-70 предназначен для приема сигналов маркерных маяков и преобразования их в сигналы, позволяющие осуществлять световую и звуковую индикацию момента пролета самолета над маркерными маяками. Селектор режимов (СР), общий для обоих УНП, предназначен для переключения режимов посадки "ILS" - "СП-50" и управления коммутацией выходных цепей Установку азимута ручного канала при работе в режиме '' VOR'' обеспечивает устройстве выбора азимута. Для настройки курсового и глиссадного приемников на частоту используемого радиомaяка и управления встроенным контролем аппаратуры используются пульты управления, осуществляющие выбор частот настройки навигационного либо посадочного диапазона, значения которых приведены в Таблице 1. Аппаратура "Курс МП-70" имеет три режима работы: 'VOR",''ILS'' И "СП -50". Работа с радиомаяками"СП-68" осуществляется в режиме "СП-50", с радиомаяками "СП-70" - в режиме''ILS''.
Рис.1. Функциональная схема аппаратуры "Курс МП-70".
В состав аппаратуры входят два УНП, которые могут работать как в одном режиме ("Навигация" или "Посадка"), так и в разных режимах: один в режиме "Навигация", другой в одном из режимов посадки. Во время посадки самолета оба УНП работают в режиме "Посадка" на частоте посадочного маяка. Работа обоих УНП в одном режиме повышает достоверность информации, вырабатываемой аппаратурой. Кроме того, наличие двух УНП повышает надежность аппаратуры, обеспечивая резервирование в случае отказа одного из УНП. Каждое УНП состоит из курсового и глиссадного приемников. УНП решает основные задачи, стоящие перед аппаратурой - прием сигналов навигационных, курсовых и глиссадных посадочных маяков, их обработку, выделение информации, содержащейся в принятых сигналах, выдачу информации в виде, удобном для потребителя, а также выработку сигналов готовности аппаратурыI. В режиме "VOR" УНП выдает следующую информацию: - азимут маяка VOR, т.е. угол между направлением на магнитный север и направлением от самолета на маяк, отсчитанный по часовой стрелке (рис. 2).
При полете по направлению на маяк (по заданному азимуту) величина азимута маяка имеет постоянное значение; если направление полета не совпадает с направлением на маяк, то азимут маяка VOR - величина непрерывно изменяющаяся (текущий азимут маяка VOR). Информация об азимуте маяка VOR выдается с электрической машины типа СКТ в виде двух напряжений частоты 400 Гц, одно из которых пропорционально синусу угла поворота ротора СКТ, а второе - косинусу; - отклонение от линии пути при полете по заданному азимуту (рис. З); эта информация выдается в виде постоянного тока отклонения - курсовой угол радиостанции (КУР) ( -сигнал "ОТ - НА" для контроля момента пролета радиомаяка VOR высокого и низкого уровня. Сигнал высокого уровня выдается в виде напряжения 27 В и позволяет подключать нагрузку, ток в которой не превышает 0,5 А; сигнал низкого уровня обеспечивает в нагрузке ток 600 - 750 мкА; - сигнал готовности курса "Гот. К" характеризует исправность курсового приемника и готовность его к работе; появляется при наличии на курсовом входе УНП сигнала от радиомаяка VOR или при проверке от БВК в виде постоянного напряжения 27 В; - телефонный сигнал - сигнал опознавания радиомаяков VOR. Информация, вырабатываемая УНП в режиме ''''VOR'', может использоваться для выполнения следующих тактических задач: -самолетовождения по заданному азимуту; -определения азимута маяков VOR; -определения курсового угла радиомаяка; -определения местоположения самолета по азимутам двух маяков VOR; -коррекции навигационных вычислителей. Маркерный приемник при работе aппаратуры в режиме "VOR" может использоваться для сигнализации пролета трассовых маркерных маяков. При этом его работа осуществляется в режиме максимальной чувствительности. Маркерный приемник в режиме "VOR" выдает телефонный и звуковой сигналы индикации при пролете трассового маркерного маяка VOR.
Принцип работы аппаратуры в режиме "ILS". Международная система "ILS", является системой инструментальной посадки самолетов. Наземное оборудование включает в себя курсовой, глиссадный и маркерный радиомаяки. Курсовой радиомаяк работает на одной из 40 частот в диапазоне 108,10 -111,975 МГц. Для создания равносигнальной зоны в радиомаяках подобного типа используется зависимость коэффициента амплитудной модуляции (т) от угловой координаты (θ). Курсовым направлением выбирается такое значение угла, при котором выполняется условие Маяк излучает электромагнитное поле, диаграмма направленности которого имеет вид двух вытянутых вдоль оси ВПП лепестков, из которых левый (со стороны захода на посадку) модулируется частотой Для опознавания курсового радиомаяка несущая частота манипулируется кодом "Морзе", для модуляции используется частота (1020±50) Гц. Глиссaдный радиомаяк работает на одной из 40 частот в диапазоне 328,60- 335,40 МГц. Принцип работы глиссадного радиомаяка аналогичен принципу работы курсового радиомаяка, за исключением того, что результирующее поле излучения радиомаяка расположено в вертикальной плоскости и равносигнальное направление образовано вдоль глиссады снижения под углом 2 - 4°. При этом верхний лепесток диаграммы направленности модулируется частотой Радиомаяк отрегулирован таким образом, что глубина модуляции каждой частотой 90 и 150 Гц вдоль линии глиссады составляет 37,5 - 42,5 %.
Таблица 1.
Маркерные радиомаяки работают на частоте 75 МГц и располагаются вдоль продолжения оси ВПП со стороны захода самолета на посадку. По международным стандартам устанавливаются два или три радиомаяка. При установке трех радиомаяков несущая частота ближнего к ВПП маяка модулируется частотой 3000 Гц, среднего - частотой 1300 Гц и дальнего - частотой 400 Гц. Глубина модуляции составляет (95±4) %. Для опознавания маркерных радиомаяков, помимо разных частот модуляции, применяется различная манипуляция модулирующих частот: - для ближнего маяка - шесть точек в секунду непрерывно; - для среднего маяка - непрерывная последовательность чередующихся точек и тире, причем тире чередуются со скоростью два тире в секунду, точки - со скоростью шесть точек в секунду; - для дальнего маяка - два тире в секунду непрерывно. Сигнал от курсового маяка ILS,, принятый курсонавигационной антенной, поступает на вход курсового приемника УНП, включенного в режим "ILS", (или обоих УНП). Сигнал от глиссадного маяка ILS,, принятый глиссадной антенной, поступает на вход глиссадного приемника УНП, работающего в режиме"ILS". Курсовой и глиссадный приемники осуществляют прием, преобразование сигналов маяков ILS, выделение несущих информацию сигналов 90 и 150 ГЦ, измерение их амплитудных соотношений. В режиме "ILS", УНП выдает информацию: - отклонение самолета от линии заданного курса в виде постоянного тока отклонения - отклонение самолета от линии глиссады снижения в виде постоянного тока отклонения - сигнал готовности курса "Гот. К" (вырабатывается при наличии на курсовом входе УНП сигнала курсового маяка ILS или при проверке от БВК) в виде постоянного напряжения 27 В; - сигнал готовности глиссады "Гот. Г" (вырабатывается при наличии на глиссадном входе УНП сигнала глиссадного радиомаяка ILS или при проверке от БВК в виде постоянного напряжения 27 В; - телефонный сигнал - сигнал опознавания радиомаяков ILS. Информация, вырабатываемая УНП в peжимe "ILS", может использоваться при заходе на посадку и пocaдкe самолета как при ручном, так и при полуавтоматическом и автоматическом пилотировании. Маркерный приемник в режиме " ILS" переключается на низкую чувствительность. Сигналы маркерных маяков, принятые маркерной антенной, поступают на вход маркерного приемника, который обеспечивает прием и демодуляцию сигнала маркерного маяка, т.е. выделение манипулированного соответствующим образом НЧ сигнала частотой 400 Гц (дальний маяк), 1300 Гц (средний маяк) или 3000 Гц (ближний маяк). Информация о пролете маркерного маяка, выделенная маркерным приемником РПМ -70, выдается в виде следующих сигналов: - телефонный сигнал. Выдается при пролете любого маяка. Представляет собой манипулированный НЧ сигнал того маяка, сигнал от которого принят (400, 1300 или 3000 Гц). При прослушивании по телефону сигнал каждого маяка имеет определенную тональную окраску и характерную для данного маяка манипуляцию; - звуковой сигнал индикации пролета любого маркерного маяка. Выдается в виде постоянного напряжения 27 В, поступающего на ЗВОНОК; - сигнал индикации пролета маяка, выдаваемый при пролете маяка в виде постоянного напряжения 27 В для световой индикации. Принцип работы аппаратуры в режиме "СП-50" Радиотехнический комплекс оборудования системы "СП-50" предназначен для обеспечения инструментальной посадки самолетов. В состав наземного оборудования входят: - курсовой радиомаяк, работающий на одной из частот 108,30; 108,70; 109,10; 109,50; 109,90; 110,30 МГц; - глиссадный радиомаяк, работающий на одной из трех частот 332,60; 333,80; 335,00 МГЦ; - два маркерных радиомаяка, работающих на частоте 75 МГц. В курсовом радиомаяке СП-50, в отличие от рациомаяка ILS, используется амплитуднофазовый принцип модуляции несущей частоты. Таблица 2 Соответствие частот курсового и глиссадного радиомаяков в режиме "СП-50"
Зависимость коэффициента модуляции несущей частоты от угловой координаты такова, что в заданном направлении (вдоль оси ВПП) он равен нулю, а при отклонении от этого направления коэффициент модуляции возрастает, принимая различные знаки при отклонении влево и вправо. Таким образом, амплитуда огибающей модулированного сигнала пропорциональна величине отклонения от продолжения осиВПП, а фаза огибающей зависит от стороны этого отклонения от оси ВПП. Для модуляции используется частота 60 Гц, называемая сигналом "Переменная фаза". Кроме того, несущая частота амплитудно модулируется поднесущей частотой 10000 Гц, которая, в свою очередь, частотно модулируется сигналом "Постоянная фаза" с частотой 60 Гц, aмnлитуда и фаза которого постоянны. В глиссадном радиомаяке положение диагрaммы направленности в пространстве аналогично глиссадному радиомаяку системы ILS. Отличие состоит в том, что верхний лепесток диагрaммы направленности промодулирован частотой 150 Гц, а нижний - частотой 90 Гц. В системе СП-50 используются два маркерных радиомаяка - средний и дальний. Модулирующие частоты обоих маркерных маяков 3000 Гц. Манипуляция несущей частоты производится таким же образом, как и в маяках ILS. Курсовой приемник УНП при работе в режиме "СП-50" осуществляет прием и преобразование сигналов курсовых маяков СП-50, выделение сигналов "Постоянная фаза" и "Переменная фаза" частоты 60 Гц, сравнение их по фазе и амплитуде. Фазовые соотношения между сигналами "Постоянная фаза" и "Переменная фаза" содержат информацию о направлении отклонения самолета от курса посадки, а амплитуда сигнала "Переменная фаза" - о величине этого отклонения. Задачи, решаемые аппаратурой при приеме сигналов глиссадных и маркерных маяков, аналогичны тем, которые решаются в режиме "ILS". В режиме "СП-50" УНП и РПМ-70 выдают ту же информацию, что и в режиме "ILS". Система СП-68 с точки зрения использования бортовыми приемными устройствами сигналов радиомаяков, входящих в нее, принципиально не отличается от системы СП-50. Отличие заключается в том, что система СП-68 имеет 20 частотных каналов как курсовых, так и глиссадных. с системой СП-б8 аппаратура "Курс МП- 70" включается в режим "СП-50".
Управление аппаратурой. Установка частоты и выбор необходимого режима работы УНП осуществляется дистанционно с помощью блоков управления из кабины самолета. Информация о набранной частоте в виде кода передается на соответствующее УНП, ВЧ-блоки которого настраиваются на прием сигнала маяка, работающего на выбранной частоте. При установке частоты навигационного радиомаяка формируется управляющий сигнал "Вкл. навигации", при установке частоты посадочного радиомаяка - сигнал "Вкл. посадки". Для придания сигналу "Вкл. посадки" признака ILS или СП-50 в селекторе режимов производится выбор посадочного режима и формируются управляющие сигналы "Вкл. ILS” или "Вкл. СП-50". Управляющие сигналы выбранного режима работы УНП поступают на соответствующее УНП, в котором под воздействием управляющих сигналов включается функциональный канал обработки информации, соответствующий выбранному режиму работы. Управление режимом работы маркерного приемника осуществляется с селектора режимов переключателем МАРШРУТ - ПОСАДКА. Управление блоком встроенного контроля осуществляется теми же управляющими сигналами, которыми управляются УНП, при этом проверка работоспособности каждого УНП производится в том режиме, в котором находится данное УНП. При проверке в режиме "VOR" на БВК поступает управляющий сигнал "Вкл. навигации", при проверке в режимах ", "ILS", или "СП-50" - управляющий сигнал "Вкл. ILS” или "Вкл. СП-50". Включение режима контроля осуществляется нажатием кнопок пульта управления с символами
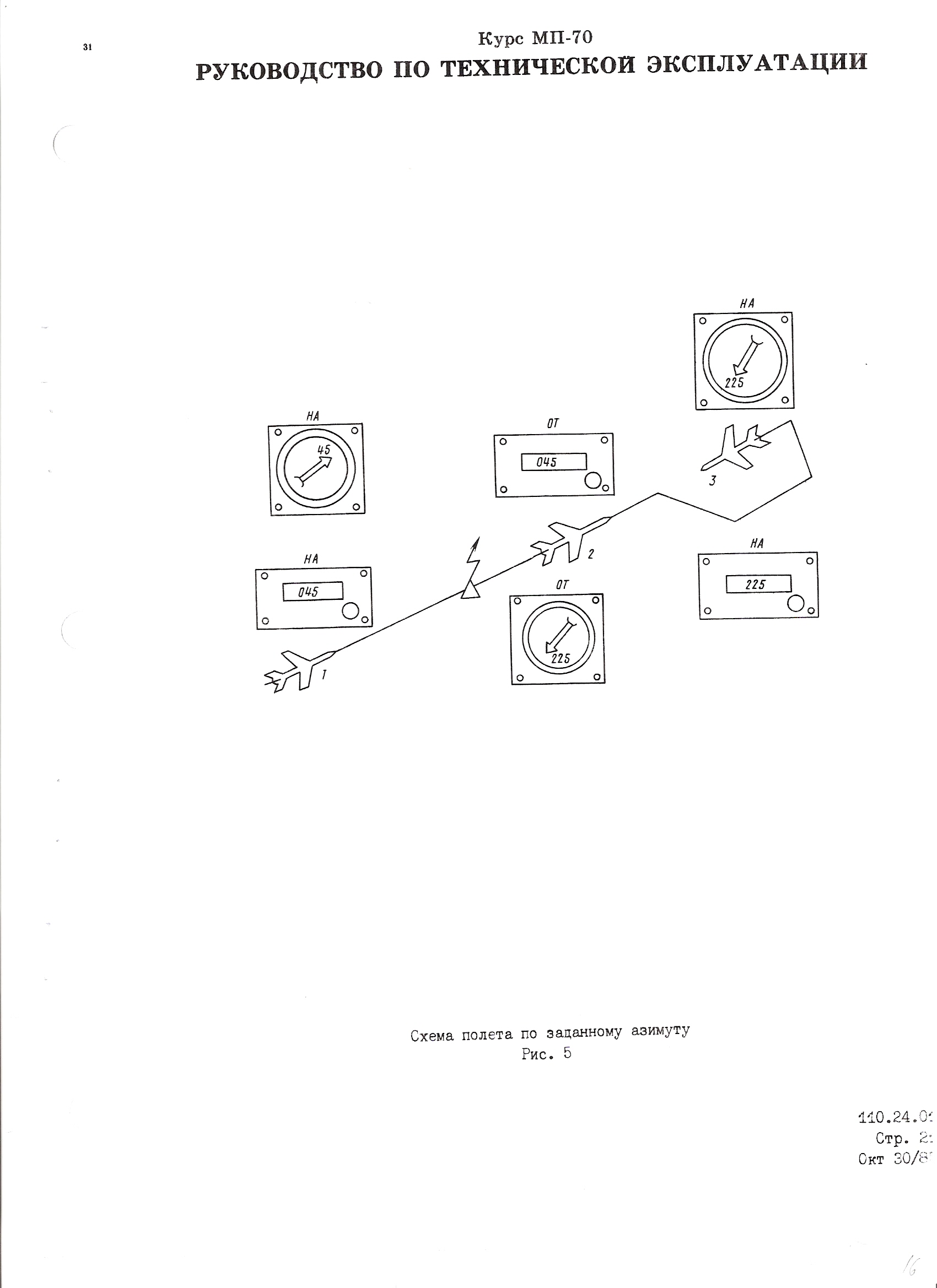
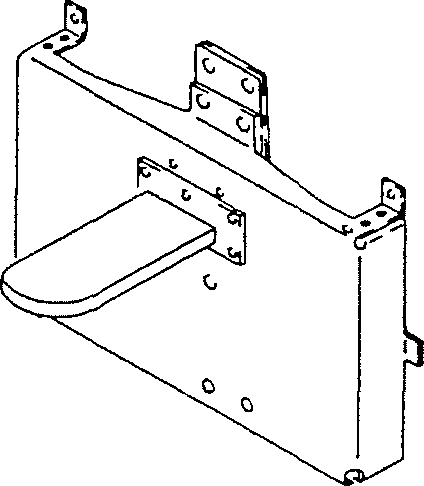
Конструкция аппаратуры Конструктивно аппаратура "Курс МП-70" выполнена из блоков (УНП, БВК, В-502, РПМ-70), размещаемых на амортизационных рамах, и пультов дистанционного управления, размещаемых на npиборных панелях самолета. Амортизационная рама моноблока состоит из индивидуальных рам, конструктивно объединенных в единую групповую рему. Эта рама установлена на четырех амортизаторах, рассчитанных на суммарный вес блоков моноблока. Крепление блоков на амортизационных рамах со стороны передней панели осуществляется с помощью винтовых замков, со стороны задней панели - пружинными фиксаторами на УНП и корпусом разъема на остальных блоках. Курсонавигационная и глиссадная антенны располагаются в носовой части самолета под диэлектрическим обтекателем РЛС. Маркерная антенна устанавливается в нижней части фюзеляжа самолета. На амортизационной раме установлена коробка с вентиляторами. Работа аппаратуры в режиме "VOR" При самолетовождении по выбранному азимуту на обоих пультах управления устанавливается значение частоты радиомаяка VOR, с которым предполагается работа; на СК1 и СК2 устанавливается значение выбранного азимута. Вырабатываемые УНП сигналы готовности поступают на бортовые устройства коммутации и индикаторные лампы "K1" и "К2", расположенные на селекторе режимов. Вырабатываемые УНП сигналы отклонения Информация о текущем азимуте VOR и курсовом угле радиостанции через бортовые устройства коммутации поступает соответственно на индикаторы азимута и курсовых углов, расположенные на приборных панелях самолета. Кроме того, при автоматическом пилотировании сигналы текущего азимута используются также и для коррекции навигационных вычислителей. Сигналы "ОТ-НА", вырабатываемые УНП, поступают на соответствующие индикаторы, расположенные на приборных панелях самолета. Сигналы опознавания радиомаяков VOR через самолетное переговорное устройство (СПУ) поступают на телефоны летчиков. Типичная схема полета по заданному азимуту показана на рис.
Здесь же представлены показания на селекторе курса и на приборе, индицирующем показания текущего азимута, на трех стадиях полета. Первая стадия - полет по заданному азимуту VOR 45°; на селекторе курса установлены показания заданного азимута 45°, на индикатор "ОТ-НА" поступают показания "НА", на индикаторе текущего азимута - показание 45°. Вторая стадия - самолет пролетел радиомаяк, фаза сигнала "Переменной фазы" изменилась на 180°; на индикаторе "ОТ-НА" - показание "ОТ", на индикаторе текущего азимута – показание 225°. Если самолет развернется на 180° и будет возв
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2019-11-02; просмотров: 274; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.21.12.122 (0.01 с.) |







 к;
к;


 ), т.е. угол между направлением полета и направлением на радиомаяк; эта информация выдается также в виде синусного и косинусного напряжения частотой 400 Гц с дифференциального СКТ и является разницей между азимутом маяка VOR (
), т.е. угол между направлением полета и направлением на радиомаяк; эта информация выдается также в виде синусного и косинусного напряжения частотой 400 Гц с дифференциального СКТ и является разницей между азимутом маяка VOR ( ) и магнитным курсом (направлением полета) (
) и магнитным курсом (направлением полета) ( ) (рис. 4), данные о котором поступают от курсовой системы самолета;
) (рис. 4), данные о котором поступают от курсовой системы самолета; . Это направление совмещается с продольной осью взлетнопосадочной полосы (ВПП).
. Это направление совмещается с продольной осью взлетнопосадочной полосы (ВПП). = 90 Гц, а правый - частотой
= 90 Гц, а правый - частотой  = 150 Гц. Радиомаяк: регулируется таким образом, что вдоль осевой линии ВПП глубина модуляции каждой частотой 90 и 150 Гц составляет 18- 22 %.
= 150 Гц. Радиомаяк: регулируется таким образом, что вдоль осевой линии ВПП глубина модуляции каждой частотой 90 и 150 Гц составляет 18- 22 %. (ВВЕРХ - ВЛЕВО),
(ВВЕРХ - ВЛЕВО),