
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Часть 1. Теоретическая механика.Стр 1 из 21Следующая ⇒
СТРАТОНИТСКИЙ Б. В. Техническая механика. Часть 1. Теоретическая механика.
Курс лекций и практическое руководство к решению задач для студентов машиностроительных специальностей Средних специальных учебных заведений.
Г. Тверь 2015 г.
Автор – Стратонитский Б.В. – преподаватель Тверского колледжа им. А.Н. Коняева, по- чётный работник среднего профессионального образования России, преподаватель высшей категории.
Рецензенты: Беляков И.И. – преподаватель «Технической механики» Тверского маши- ностроительного колледжа, преподаватель высшей катего- рии, почётный работник среднего профессионального обра- зования России. Цуркан А.А. - директорТверского колледжа имени А.Н. Коняева, предсе- датель Совета директоров средних специальных учебных заведений Тверской области.
Содержание. Введение……………………………………………………………………………………….4 Лекция 1. Теоретическая механика. Общие сведения………………………………………6 Лекция 2. Определение равнодействующей двух сходящихся сил………………………...7 Лекция 3. Определение равнодействующей нескольких сходящихся сил………………...9 Лекция 4. Определение равнодействующей для плоской системы произвольно располо- женных сил………………………………………………………………………..12 Лекция 5. Равновесие плоской системы сходящихся сил………………………………….14 Лекция 6. Равновесие плоской системы параллельных сил………………………………..17 Лекция 7. Центр тяжести тела………………………………………………………………..19 Лекция 8. Сопротивление материалов. Общие сведения…………………………………..25 Лекция 9. Деформация растяжение – сжатие……………………………………………….26 Лекция 10. Деформации и перемещения при растяжении – сжатии………………………28 Лекция 11. Статические испытания материалов……………………………………………32
Лекция 12. Виды напряжений и факторы, влияющие на их величину. Расчёты на прочность………………………………………………………………………….35 Лекция 13. Расчёты на прочность при растяжении – сжатии………………………………36 Лекция 14. Деформация кручение. Построение эпюр крутящих моментов. Понятие о Рациональной расчётной схеме…………………………………………………..38 Лекция 15. Деформации и перемещения при кручении бруса круглого поперечного Сечения. Касательные напряжения………………………………………………42 Лекция 16. Расчёты на прочность и жёсткость при кручении………………………………44 Лекции 17, 18. Деформация изгиб. Общие сведения. Внутренние силовые факторы и их эпюры……………………………………………………………………….46 Лекция 19. Нормальные напряжения при прямом изгибе. Расчёты на прочность………...52 Лекция 20. Перемещения при изгибе. Расчёты на жёсткость……………………………….55 Лекция 21. Продольный изгиб. Критическая сила, критическое напряжение. Формулы Эйлера и Ясинского. Расчёты на устойчивость…………………………………59 Сортамент………………………………………………………………………………………65 Международная система единиц СИ…………………………………………………………70 Литература……………………………………………………………………………………...71
ВВЕДЕНИЕ. Техникам, занятым в любой отрасли машиностроения необходимо иметь хорошую фи- зико – математическую и общетехническую подготовки. В этом смысле дисциплина Техническая механика является очень важной. Она состоит из трёх разделов: теоретической механики, сопротивления материалов и деталей машин. Учебная программа технической механики предусматривает изучение общих законов равновесия и движения материальных тел, основных методов расчётов на прочность, жёсткость и устойчивость, устройства, области применения и основ проектирования деталей и сборочных единиц общего назначения. Все знания и умения, полученные при изучении технической механики, найдут применение при решении технических задач в процессе практической работы, при проектировании производства и эксплуатации различных машин и оборудования.
Настоящее учебное пособие содержит основные теоретические положения, типовые задачи курса теоретической механики, сопротивления материалов и методические указания по решению. В учебном пособии содержится весь необходимый справочный материал, рисунки, сопровождающие методические указания и теоретический материал, а также многовариантные задания для самостоятельной работы студентов. При пользовании этим учебным пособием развиваются профессионально - важные качества студентов машиностроительных специальностей средних специальных учебных заведений, прививаются умения самостоятельной работы. Данное учебное пособие используется автором при изучении курса «Техническая механика» в объёме 180 и более часов (для специальностей 151001 «Технология машиностроения», 150203 «Сварочное производство», 190604 «Техническое обслуживание и ремонт автомобильного транспорта»). При изучении курса «Техническая механика» в объёме менее 180 часов данное учебное пособие можно использовать частично, выбрав наиболее важные по усмотрению преподавателя лекции и задания.
ТЕ О Р Е Т И Ч Е М Е Х А Н И К А С Т А Т И К А К И Н Е М А Т И К А Д И Н А М И К А
С о п р о т и в л е н и е М а т е р и а л о в Лекция 1. Теоретическая механика.Общие сведения. Теоретическая механика – наука, изучающая механическое движение. Теоретическая механика состоит из трех разделов: 1) Статика – раздел, изучающий равновесие тел под действием сил. 2) Кинематика – раздел, изучающий движение тел с геометрической точки зрения (без учета действующих сил). 3) Динамика – раздел, изучающий взаимосвязь между параметрами движения тела и действующими на него силами. Основные понятия статики 1. Равновесие – такое состояние тела, при котором все действия на него со стороны других тел взаимно скомпенсированы. При этом тело находится в состоянии покоя, или двигается равномерно и прямолинейно. 2.
Рисунок 1. Обозначение силы.
3. Совокупность сил, действующих на тело, образуют систему сил. Существует 3 вида систем сил: 3.1 Система сходящихся сил – это система сил, линии действия которых сходятся в одной точке.
Рисунок 2. Система сходящихся сил.
Рисунок 3. Система параллельных сил.
1.3 Система произвольно расположенных сил – это система сил, линии действия которых не сходятся в одной точке и не параллельны.
Рисунок 4. Равнодействующая сила.
Доказано, что во всех случаях, кроме одного, можно найти равнодействующую для системы сил. 5. Уравновешивающая сила – это сила, приводящая тело в состояние равновесия. Рисунок 5. Параллелограмм сил. Параллелограмм можно заменить треугольником, в котором стороны будут силами (силовой треугольник). В таком случае определение равнодействующей сводится к определению стороны треугольника по двум сторонам и углу между ними:
Рисунок 6. Силовой треугольник. Величину равнодействующей силы определяем по теореме косинусов: R= Направление равнодействующей характеризуется углом, который она составляетс первой силой (γ). Величину этого угла определим по теореме синусов: Пример решения задачи. На тело действуют две силы, линии действия которых сходятся в одной точке. Сила РЕШЕНИЕ. Для того, чтобы уравновесить тело, на которое действуют силы, необходимо найти равнодействующую силу, а затем присоединить к телу равную ей и противоположно направленную по одной прямой силу, которая и будет уравновешивающей силой. Существует два способа определения равнодействующей. 1 способ аналитический. Модуль равнодействующей силы определяется при помощи теоремы косинусов: Направление равнодействующей определяется при помощи теоремы синусов:
2 способ графический. Решение графическим способом производится построением силового треугольника в следующем порядке: -выбирается масштаб сил (произвольно), чтобы рисунок был не очень мелким и не очень крупным. В нашем случае масштаб сил
Рисунок 7. Графический способ решения. -определяются в выбранном масштабе длины векторов сил по формуле -из произвольной точки в выбранном масштабе и в заданном направлении откладывается вектор силы -измеряется длина вектора равнодействующей, умножается на принятый масштаб, в результате получается величина (модуль) равнодействующей силы. В нашем случае -измеряется угол между векторами первой силы и равнодействующей силы, этим самым определяется направление равнодействующей. В нашем случае Графическое решение представлено на рисунке 7. Ответ. Уравновесить заданное тело можно силой, равной 12,2 Н и составляющей с силой Задача для самостоятельного решения. На тело действуют две сходящиеся силы, расположенные так, как указано в таблице 1. Как уравновесить тело? Решить задачу аналитическим и графическим способами.
Таблица 1. Варианты задания 1.1.
Пример решения задачи На тело действуют 4 силы, расположенные так, как указано на рисунке. F1 = 10Н, F2 = 8H, F3 = 20H, F4 = 16H.Как уравновесить тело?
Рисунок 9. Расположение заданных сил. РЕШЕНИЕ. Для того, чтобы уравновесить тело, определим равнодействующую силу: 1. Проекции равнодействующей силы:
Результаты показывают, что направление равнодействующей противоположно осям. Это значит, что равнодействующая расположена в III координатной четверти. 2. Модуль равнодействующей силы определим по теореме Пифагора:
3. Направление равнодействующей силы определим по величине угла, который она составляет с осью Х:
Проверим правильность решения графическим способом. Построим силовой многоугольник. Для этого выберем масштаб сил
Рисунок 10. Графический способ решения. Результаты проверки говорят о правильности решения. Ответ. Уравновесить тело можно силой, равной 28.5 Н и составляющей с осью Х угол Задача для самостоятельного решения. На тело действуют трисходящиеся силы, расположенные так, как указано на рисунке 11. Как уравновесить тело? Решить задачу аналитическим и графическим способами по данным из таблицы 2.
Рисунок 11. Схемы для задания 1.2.
Таблица 2. Варианты задания 1.2.
Рисунок 11. Определение момента силы относительно точки. Момент силы относительно точки считается положительным, если сила стремится повернуть тело вокруг точки в направлении против движения часовой стрелки, и отрицательным, если по часовой стрелке.Момент силы относительно точки равен нулю, если линия действия силы проходит через точку. Пример решения задачи. На тело, имеющее форму прямоугольной плиты с размерами
Рисунок 12. Расчётная схема и решение задачи. РЕШЕНИЕ. Приведём заданную систему сил к центру О. За центр рекомендуется принимать ту точку, в которой сходится наибольшее количество сил системы. В нашем случае это нижняя левая точка (рисунок 11). Главный момент системы сил равен алгебраической сумме моментов всех сил относительно выбранного центра О. Моменты всех остальных сил относительно точки О равны нулю, т. к. линии их действия проходят через точку О. Выбираем точку О за начало координат, проводим оси Х и Y и определяем проекции главного вектора на эти оси:
Полученные значения проекций показывают, что главный вектор располагается во второй координатной четверти (рисунок 11). Модуль главного вектора определим по теореме Пифагора через проекции:
Ответ: уравновесить заданное тело можно силой 7.17 Н, удалённой от точки О на расстоянии 1.67 м. и составляющей с осью Х угол Задача для самостоятельного решения. На тело, имеющее форму квадратной плиты, действуют три силы, расположенные так, как показано на рисунке 13. Как уравновесить тело. Значения действующих сил взять из таблицы 4. Первые 15 вариантов решают задачу по схеме 1, а следующие (с 16 по 30) – по схеме 2.
Рисунок 12. Расчётные схемы для задания 1.4. Таблица 3. Варианты задания 1.3.
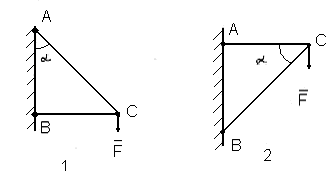
Пример решения задачи Рассчитать стержневую систему, приведенную на рисунке.
F=40kH Рисунок 13. Стержневая система. РЕЩЕНИЕ. Рассмотрим отдельно равновесие узла C. На него действует внешняя сила Примем точку C за начало координат и проведем оси таким образом, чтобы одна из них проходила вдоль реакции.
Рисунок 14. Расчётная схема узла С.
Из (2) Из (1) Реакция RACположительна, значит ее направление указано верно. Реакция RBCотрицательна, значит ее направление противоположно указанному. Усилия в стержнях численно равны реакциям и противоположны им по направлениям. Проверим правильность решения графическим способом. Графический способ заключается в построении замкнутого силового треугольника. Для этого: - выбираем масштаб (произвольно) - определяем длину вектора заданной силы в выбранном масштабе - из произвольной точки откладываем заданную силу F. Из начала отложенного вектора проводим линию в направлении реакции RBC, из конца отложенного вектора проводим линию в направлении реакции RAC. Пересекаясь, проведённые линии образуют треугольник, каждая сторона которого представляет собой силу. Этот треугольник должен быть замкнутым, т. е. начало каждого вектора совпадает с концом другого. На этом основании обозначим направления векторов реакций (смотри рисунок 15). - измеряем длины векторов реакций, умножаем их на масштаб и определяем величины реакций:
Рисунок 15. Графический способ решения. Сравнивая результаты аналитического и графического способов решения, делаем вывод, что реакции определены верно. Усилия в стержнях равны реакциям и противоположны им по направлению, т. е. если реакция сжимает стержень, значит он растянут, а если реакция растягивает стержень, значит он сжат. Ответ: стержень АС растянут усилием 29,3 кН; стержень ВС сжат усилием 35,9 кН. Задача для самостоятельного решения. Рассчитать стержневую систему, указанную на рисунке 16по данным, указанным в таблице 4. Решение выполнить аналитическим способом и сделать проверку графическим способом.
Рисунок 16. Расчётные схемы стержней. Таблица 4. Варианты задания.
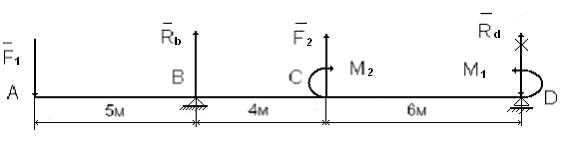
ПРИМЕЧАНИЕ: первые 15 вариантов решают задачу по схеме 1, а следующие (с 16 по 30) - по схеме 2. Рисунок 17. Обозначение опор балки. 1 – Неподвижная опора; 2 – Подвижная опора. У балки две опоры: одна неподвижная, которая запрещает балке двигаться в двух направлениях, вдоль и перпендикулярно её оси, а другая подвижная, которая запрещает балке двигаться в одном направлении – перпендикулярном опорной поверхности. Это позволяет скомпенсировать температурные деформации балки. Условные обозначения опор показаны на рисунке 17. Рассчитать балочную систему – значит определить реакции опор балки. Пример решения задачи. Рассчитать балочную систему, изображенную на рисунке.F1=18кH; F2=30кH; M1=20кHм; M2=10 кHм Рисунок 18. Расчётная схема балки. РЕШЕНИЕ. 1) Обозначаем на рисунке реакции опор балки. Они всегда направлены параллельно силам. 2) Составляем уравнения равновесия, решая которые, определим реакции.
Из уравнения (2) имеем: Знак «-» показывает, что истинное направление реакции RBпротивоположно указанному. Из уравнения (1) имеем: Проверим правильность определения реакций, составив алгебраическую сумму моментов всей нагрузки, включая и реакции, относительно любой другой точки, например, относительно точки D:
Результат проверки говорит о правильности определения реакций опор. Ответ: реакция опоры RB = 10 кН, реакция опоры RD = 22 кН. Задача для самостоятельного решения. Рассчитать балочную систему по данным, указанным в таблице 5 и на рисунке 19. Таблица 5. Варианты задания 1.5. пример 3.
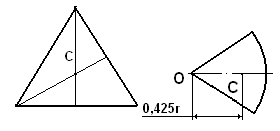
Рисунок 19. Расчётные схемы балки. Рисунок 20. Положение центра тяжести прямоугольника. Класс 3. - фигуры, имеющие 1 ось симметрии (равнобедренный треугольник, круговой сектор). Центр тяжести таких фигур расположен на этой оси и его конкретное место определяется при помощи правил и теорем геометрии. Например, центр тяжести равнобедренного треугольника расположен в точке пересечения его медиан, а центр тяжести кругового сектора расположен на биссектрисе его угла и удалён от вершины на расстоянии
Рисунок 21. Положение центров тяжести равнобедренного треугольника и кругового сектора. Класс 4 - фигуры, не имеющие осей симметрии. Они бывают простыми и сложными. Центры тяжести простых фигур определяются по правилам и теоремам геометрии. Например, прямоугольный треугольник. Центр тяжести прямоугольного треугольника расположен в точке пересечения его медиан. Удобно также определять центр тяжести прямоугольного треугольника, разделив его катеты на 3 равные части и, отложив от прямого угла по одной трети, восстановить перпендикуляры. В точке пересечения этих перпендикуляров и будет центр тяжести прямоугольного треугольника.
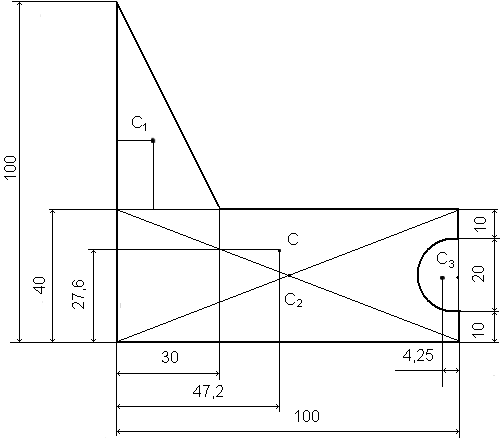
Рисунок 22. Положение центра тяжести прямоугольного треугольника. Положение центра тяжести сложной фигуры определяется по специальному правилу. Примеры решения задачи. ПРИМЕР 1. Сложная фигура состоит из простых геометрических фигур (рисунок 23).
Рисунок 23. Сложная плоская фигура. РЕШЕНИЕ. 1. Разбиваем заданную плоскую фигуру на простые составные части: 1- прямоугольный треугольник, 2- прямоугольник, 3- круговой сектор (вырезан). 2. Определяем площади каждой составной части: Площадь прямоугольного треугольника равна половине произведения его катетов.
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2019-11-02; просмотров: 445; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.145.47.253 (0.128 с.) |
 Часть 2. Сопротивление материалов.
Часть 2. Сопротивление материалов.


 С К А Я
С К А Я














 =
= 



 Н, направленная горизонтально слева направо, сила
Н, направленная горизонтально слева направо, сила  Н составляет с ней угол
Н составляет с ней угол  . Как уравновесить тело?
. Как уравновесить тело? Н.
Н.  , где
, где  - угол между равнодействующей и силой
- угол между равнодействующей и силой  . Из этого соотношения получим:
. Из этого соотношения получим:  .
. Н/см.
Н/см.
 . В нашем случае,
. В нашем случае,  см,
см,  см.
см. откладывается вектор силы
откладывается вектор силы  . Вектор равнодействующей силы соединит начало первой силы с концом второй;
. Вектор равнодействующей силы соединит начало первой силы с концом второй; см.;
см.; .
. угол
угол  . Ответ записывается по аналитическому спосо- бу решения.
. Ответ записывается по аналитическому спосо- бу решения.

 Н.
Н.
 Н/см и определим длины векторов сил в этом масштабе по формуле
Н/см и определим длины векторов сил в этом масштабе по формуле  . В результате
. В результате  см,
см,  см,
см,  см,
см,  см. Из произвольной точки откладываем вектор первой силы, из его конца вектор второй силы, из его конца вектор третьей силы и из его конца вектор четвёртой силы. Равнодействующая сила изобразится вектором, соединяющим начало первой силы с концом четвёртой (рисунок10). Измерив длину вектора равнодействующей силы и умножив её на выбранный масштаб, получим значение модуля равнодействующей:
см. Из произвольной точки откладываем вектор первой силы, из его конца вектор второй силы, из его конца вектор третьей силы и из его конца вектор четвёртой силы. Равнодействующая сила изобразится вектором, соединяющим начало первой силы с концом четвёртой (рисунок10). Измерив длину вектора равнодействующей силы и умножив её на выбранный масштаб, получим значение модуля равнодействующей:  Н. Измерив угол между вектором равнодействующей и осью Х, определим направление равнодействующей. В нашем случае
Н. Измерив угол между вектором равнодействующей и осью Х, определим направление равнодействующей. В нашем случае  . Уравновешивающая сила изобразится вектором, равным равнодействующей силе и направленным в противоположную сторону по одной прямой (рисунок 10).
. Уравновешивающая сила изобразится вектором, равным равнодействующей силе и направленным в противоположную сторону по одной прямой (рисунок 10).
 . Ответ записывается по результатам аналитического способа решения.
. Ответ записывается по результатам аналитического способа решения.
 м и
м и  м. дейст-вуют четыре силы, направленные так, как указано на рисунке 11. Как уравновесить тело, если
м. дейст-вуют четыре силы, направленные так, как указано на рисунке 11. Как уравновесить тело, если  Н,
Н,  Н,
Н,  Н,
Н,  Н.?
Н.? 

 .
.
 Н
Н Н. Направление главного вектора определим по углу, который он составляет с осью Х:
Н. Направление главного вектора определим по углу, который он составляет с осью Х: .Равнодействующая сила удалена от главного вектора на расстоянии
.Равнодействующая сила удалена от главного вектора на расстоянии  м. и направлена так, чтобы её момент относительно точки О имел такое же направление, что и главный момент (рисунок 12).
м. и направлена так, чтобы её момент относительно точки О имел такое же направление, что и главный момент (рисунок 12). (рисунок 12).
(рисунок 12).








 с одной стороны и стержни с другой. Силы, с которыми действуют стержни на узел называются реакциями. Ои направлены вдоль стержней.
с одной стороны и стержни с другой. Силы, с которыми действуют стержни на узел называются реакциями. Ои направлены вдоль стержней.













 кН/см.
кН/см. см.
см. кН;
кН;  кН.
кН.


 кН.
кН. кН.
кН.

 , где 𝛼 – половина угла при вершине сектора, r–радиус сектора. В частном случае для сектора с углом при вершине 180∘ОС =
, где 𝛼 – половина угла при вершине сектора, r–радиус сектора. В частном случае для сектора с углом при вершине 180∘ОС = 

 мм
мм


