
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Проектирование оптимальных систем управленияСтр 1 из 8Следующая ⇒
ПРОЕКТИРОВАНИЕ ОПТИМАЛЬНЫХ СИСТЕМ УПРАВЛЕНИЯ Методические указания к лабораторным работам
Санкт–Петербург 2013
Введение Одним из важных разделов дисциплины «Проектирование оптимальных систем управления» является выбор математического метода решения задачи оптимизации и соответствующего программного обеспечения. Настоящий лабораторный практикум предназначен для формирования у студентов навыков решения задач оптимального управления на основе принципа максимума Л.С. Понтрягина. Поскольку в соответствии с принципом максимума оптимальное управляющее воздействие рассматривается как решение некоторой системы дифференциальных уравнений, то одной из задач практикума является напомнить студентам основные положения теории таких уравнений. Рассмотренные в практикуме примеры решения дифференциальных уравнений выполнены с применением метода преобразования Лапласа. По нашему мнению этот метод решения дифференциальных уравнений имеет некоторые преимущества перед классическим методом. Во-первых, метод преобразования Лапласа оперирует понятиями начальных условий, которые определены и в связи с принципом максимума. Понятие начальных условий имеет гораздо больше физических аналогий, чем постоянные интегрирования в классическом методе. Кроме того метод преобразования Лапласа тесно связан с такими, часто используемыми в теории автоматического управления понятиями как передаточные функции и частотные характеристики. Аналитическое решение дифференциальных уравнений, возникающих при решении задач оптимального управления на основе принципа максимума, как правило, связано со значительными трудностями. Причинами являются сложность практически важных моделей объектов управления и необходимость удвоения порядка рассматриваемых уравнений (по сравнению с порядком объекта управления) за счет необходимости учета сопряженных переменных. Практические результаты, как правило, получаются путем применения численных методов. Основная задача, решаемая численными методами, заключается в поиске начальных условий для системы сопряженных уравнений. Кроме того, в процессе поиска возникает необходимость решения системы дифференциальных уравнений для определения конечного состояния объекта управления, соответствующего пробным значениям начальных условий для системы сопряженных уравнений.
Следовательно, решение задачи оптимального управления подразумевает знакомство студентов с методами поиска и численными методами решения дифференциальных уравнений. В связи с этим задания на лабораторные работы составлено таким образом, чтобы студенты смогли проявить навыки применения численных методов поиска и решения дифференциальных уравнений при решении конкретных задач оптимизации. Кроме того, предусмотрены лабораторные работы, направленные на изучение собственно методов поиска и методов численного решения дифференциальных уравнений. Рассмотренные в методических указаниях примеры ориентируют студентов на использование упомянутых ранее численных методов, реализованных в среде математического пакета программ MATLAB. Численное решение дифференциального уравнения (п. 1.2.1.) с помощью функции ODE45 из MATLAB. Следует отметить, что набор экспонент в решении дифференциального уравнения существенно зависит от начальных условий.
Файл Main2.m %exp(-t) and exp(-2*t) x10=1; x20=1; %exp(-t) only x10=1; x20=-1; %exp(-2*t) only x10=0.5; x20=-1; t0=0; tm=10; [t,x]=ode45(@odefun2,[t0 tm],[x10,x20]); %вычисление переменных y1 и y2 необходимо для сравнения %графиков аналитического и численного решений y1=(2*x10+x20)*exp(-t)-(x10+x20)*exp(-2*t); y2=(-2*x10-x20)*exp(-t)+(2*x10+2*x20)*exp(-2*t); plot(t,x(:,1),'r',t,x(:,2),'g',t,y1,'bo',t,y2,'ko');
Файл Odefun2.m function f=odefun2(t,x) f=[x(2);-2*x(1)-3*x(2)];
Модальное управление. Модальное управление имеет своей целью определение таких параметров регулятора, которые обеспечивают заданные значения корней характеристического уравнения замкнутой системы управления. Исходя из практики применения модального управления, были выбраны так называемые стандартные полиномы, распределение корней в которых удовлетворяет инженерным требованиям качества переходных процессов (полиномы Ньютона, Баттерворта и т.п.). Недостатком подхода к проектированию систем управления на основе стандартных полиномов является то, что, эти полиномы определены с точностью до базовой частоты, т.е. до масштабного коэффициента, характеризующего время протекания переходных процессов. Таким образом, для решения задачи модального управления необходимо не только выбрать желаемый характер переходных процессов (выбрать тип стандартного полинома), но и определить целесообразное значение базовой частоты для выбранного полинома.
Устранить отмеченный недостаток можно путем вычисления базовой частоты в соответствии с экстремальным значением дополнительного показателя качества. Одним из таких показателей может быть время переходного процесса. Опора на время переходного процесса вполне конструктивна для реальных объектов управления, т.к. физически реализуемые объекты всегда содержат ограничения на максимальные значения параметров движения (скоростей, ускорений, сил, …) и, следовательно, их динамика существенно зависит от масштаба времени. Для примера рассмотрим следующую задачу: Для заданного объекта управления определить базовую частоту стандартного полинома, обеспечивающую минимум времени переходного процесса. Объект управления:
Закон управления:
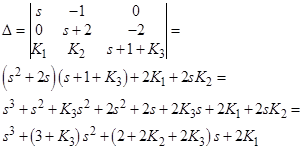
На первом этапе решения задачи определяем характеристическое уравнение замкнутой системы, которая получается при использовании заданного закона управления объектом: Динамика замкнутой системы без учета ограничения на величину управления описывается следующей системой уравнений:
Характеристический полином замкнутой системы:
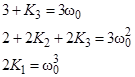
Сравнивая полученный характеристический полином замкнутой системы со стандартным полиномом 3 порядка
получаем систему уравнений для определения коэффициентов обратной связи:
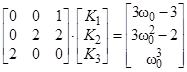
На втором этапе требуется найти такое значение базовой частоты, которому соответствует минимальное значение времени переходного процесса в замкнутой системе управления, состоящей из объекта управления (3.1), управляемого по закону (3.2), параметры которого находятся из решения системы уравнений (3.3). Рассмотрим определение необходимого значения базовой частоты методом поиска «вручную». Для этого первоначально создадим MATLAB –программу, которая позволяет рассчитать время переходного процесса, соответствующего произвольно заданному значению базовой частоты. Эта программа состоит из двух скриптов:
Указание: Временем переходного процесса считается время после, которого измеряемая величина перестает выходить за пределы 5% от величины начального отклонения.
Файл main3.m %вектор коэфф-тов обратной связи K %и ограничение на управление um %объявлены глобальными для возможности передачи их в функцию odefun3 global K um um=1; %исследуемое значение базовой частоты om0=6; %начальное отклонение по x1 x10=1; %матрицы системы уравнений (3.3) A=[0 0 1; 0 2 2; 2 0 0]; b=[3*om0-3;3*om0^2-2;om0^3]; %решение системы уравнений (3.3) с помощью оператора «обратный слэш» K=A\b; %решение системы уравнений (3.1) и запись значений времени (t) %и соответствующих значений вектора состояния (x) в соответствующие %MATLAB - матрицы [t,x]=ode45('odefun3',[0 10],[x10 0 0]);
%вычисление времени переходного процесса tm for i=length(t):-1:1 if abs(x(i,1))>0.05*x10 tm=t(i); break end end %отображение вычисленного значения времени переходного процесса %в окне команд MATLAB tm plot(t,x); Файл odefun3.m function f=odefun3(t,x) global K um %вычисление значения управляющего воздействия %в соответствии с законом управления u=-K(1)*x(1)-K(2)*x(2)-K(3)*x(3); %учет ограничения на величину управляющего воздействия if abs(u)>um u=um*sign(u); end %расчет вектора-столбца значений правых частей системы уравнений (3.1) f=[x(2);-2*x(2)+2*x(3);-x(3)+u]; Очевидно, что однократное выполнение скрипта main3.m позволяет вычислить время переходного процесса в исследуемой замкнутой системе, соответствующего заданному значению базовой частоты полинома Ньютона. Выполнение серии расчетов для разных значений базовой частоты позволяет выполнить поиск базовой частоты, обеспечивающей минимальное время переходного процесса. Организацию автоматического поиска базовой частоты с помощью функции FMINSEARCH предлагается выполнить студентам самостоятельно. Для этого целесообразно преобразовать файл-программу main.m в файл-функцию, у которой входным параметром является значение базовой частоты, а выходным – значение времени переходного процесса. Для запуска процесса поиска достаточно задать начальное значение базовой частоты и вызвать функцию FMINSEARCH, которая ссылается на разработанную ранее файл-функцию. Индивидуальные задания (по бригадам) По каждому варианту необходимо найти значение базовой частоты заданного типа полинома, обеспечивающее минимальное время переходных процессов в замкнутой системе управления и построить графики переходных процессов по состояниям объекта управления и управляющему воздействию. Для всех вариантов максимально допустимое значение управляющего воздействие принимается равным 1 и вектор начальных условий [1 0 0] Подробное описание стандартных полиномов См. приложение.
Приложение 1. Стандартные характеристические полиномы Общая форма полиномов (нормирование по базовой частоте
О динамических свойствах систем, имеющих рассматриваемые характеристические полиномы, можно судить по переходным характеристикам:
где 1. Биноминальные полиномы (Полиномы Ньютона)
Коэффициенты биноминального полинома степени
Полиномы Баттерворта Коэффициенты полинома Баттерворта степени
3. Полиномы, минимизирующие функционал Коэффициенты рассматриваемого полинома степени
4. Полиномы, минимизирующие функционал Коэффициенты рассматриваемого полинома степени
Приложение 2. Контрольные вопросы 1. Что является результатом аналитического решением дифференциального уравнения? 2. Что является результатом численного решения дифференциального уравнения? 3. Сколько решений имеет дифференциальное уравнение порядка 4. Приведите соответствия между оригиналами и L-изображениями основных функций, используемых при решении дифференциальных уравнений. 5. Чем отличаются статические и динамические задачи оптимизации? 6. Приведите основные особенности метода поиска, реализованного в MATLAB-функции FMINSEARCH. 7. Зависит ли результат работы функции FMINSEARCH от выбора начальной точки поиска и почему? 8. Сколько решений имеет задача поиска базовой частоты стандартного полинома, обеспечивающей минимальное время переходного процесса в линейной системе управления? 9. Как определяется время переходного процесса при решении задачи модального управления? 10. Какие этапы выполняются при решении задач оптимального управления на основе принципа максимума Л.С. Понтрягина? 11. В чем особенности применения принципа максимума Л.С. Понтрягина к решению задач на экономию управления? 12. Приведите общий вид выражения для управляющего воздействия как функции времени. (Имеется в виду задача экономии управления объектом, собственные числа которого вещественны и различны).
13. Что обычно является результатом решения задачи экономии управления численным методом на основании принципа максимума? 14. Сформулируйте задачу оптимизации расхода управления ориентированную на использование поисковых методов. 15. В чем особенности применения принципа максимума Л.С. Понтрягина к решению задач оптимального быстродействия? 16. Сформулируйте теорему об N интервалах. 17. Докажите, что теорема об N интервалах неприменима к объектам управления, собственные числа которых являются комплексными. 18. Начертите график функции времени, которая может быть решением задачи оптимального быстродействия для объекта управления 2 порядка, собственные числа которого вещественны и различны. 19. Начертите график функции времени, которая не может быть решением задачи оптимального быстродействия для объекта управления 2 порядка, собственные числа которого вещественны и различны. 20. Начертите график функции времени, которая не может быть решением задачи оптимального быстродействия для объекта управления 2 порядка, собственные числа которого являются комплексными числами. 21. Можно ли реализовать оптимальное по быстродействию управление в виде регулятора с обратными связями? 22. Что обычно является результатом решения задачи оптимального быстродействия численным методом на основании принципа максимума? 23. Сформулируйте задачу оптимального быстродействия, ориентированную на использование поисковых методов. 24. В чем особенности применения принципа максимума Л.С. Понтрягина к решению линейной квадратичной задачи? 25. Какие этапы выполнялись в процессе решения задачи оптимального быстродействия в лабораторной работе 7? 26. Опишите процесс построения линий переключения при выполнении лабораторной работы 8. ПРОЕКТИРОВАНИЕ ОПТИМАЛЬНЫХ СИСТЕМ УПРАВЛЕНИЯ Методические указания к лабораторным работам
Санкт–Петербург 2013
Введение Одним из важных разделов дисциплины «Проектирование оптимальных систем управления» является выбор математического метода решения задачи оптимизации и соответствующего программного обеспечения. Настоящий лабораторный практикум предназначен для формирования у студентов навыков решения задач оптимального управления на основе принципа максимума Л.С. Понтрягина. Поскольку в соответствии с принципом максимума оптимальное управляющее воздействие рассматривается как решение некоторой системы дифференциальных уравнений, то одной из задач практикума является напомнить студентам основные положения теории таких уравнений. Рассмотренные в практикуме примеры решения дифференциальных уравнений выполнены с применением метода преобразования Лапласа. По нашему мнению этот метод решения дифференциальных уравнений имеет некоторые преимущества перед классическим методом. Во-первых, метод преобразования Лапласа оперирует понятиями начальных условий, которые определены и в связи с принципом максимума. Понятие начальных условий имеет гораздо больше физических аналогий, чем постоянные интегрирования в классическом методе. Кроме того метод преобразования Лапласа тесно связан с такими, часто используемыми в теории автоматического управления понятиями как передаточные функции и частотные характеристики. Аналитическое решение дифференциальных уравнений, возникающих при решении задач оптимального управления на основе принципа максимума, как правило, связано со значительными трудностями. Причинами являются сложность практически важных моделей объектов управления и необходимость удвоения порядка рассматриваемых уравнений (по сравнению с порядком объекта управления) за счет необходимости учета сопряженных переменных. Практические результаты, как правило, получаются путем применения численных методов. Основная задача, решаемая численными методами, заключается в поиске начальных условий для системы сопряженных уравнений. Кроме того, в процессе поиска возникает необходимость решения системы дифференциальных уравнений для определения конечного состояния объекта управления, соответствующего пробным значениям начальных условий для системы сопряженных уравнений. Следовательно, решение задачи оптимального управления подразумевает знакомство студентов с методами поиска и численными методами решения дифференциальных уравнений. В связи с этим задания на лабораторные работы составлено таким образом, чтобы студенты смогли проявить навыки применения численных методов поиска и решения дифференциальных уравнений при решении конкретных задач оптимизации. Кроме того, предусмотрены лабораторные работы, направленные на изучение собственно методов поиска и методов численного решения дифференциальных уравнений. Рассмотренные в методических указаниях примеры ориентируют студентов на использование упомянутых ранее численных методов, реализованных в среде математического пакета программ MATLAB.
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2019-11-02; просмотров: 170; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.133.141.6 (0.063 с.) |
 (3.1)
(3.1) (3.2)
(3.2)

 (3.3)
(3.3)




 ):
):

 - оператор обратного преобразования Лапласа.
- оператор обратного преобразования Лапласа.
 приведены в таблице.
приведены в таблице.











 ?
?


