Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Регулятори. Призначення автоматичних регуляторів.Содержание книги
Поиск на нашем сайте Тема 1. Регулятори. Призначення автоматичних регуляторів. Автоматический регулятор - это средство автоматизации, получающее, усиливающее, и преобразующее сигнал отклонения регулируемой величины и целенаправленно воздействующее на объект регулирования. Он обеспечивает поддержание заданного значения регулируемой величины или изменение ее значения по заданному закону.
Узагальнена структурна схема автоматичних регуляторів.
ЗУ – задающее устройство; ЭС – элемент сравнения; РУ – регулирующее устройство, вырабатывает m(t) – регулирующее воздействие (управляющий сигнал) на основании заложенного алгоритма; ИУ – исполнительное устройство, вырабатывает силовое регулирующее воздействие на объект; ОУ – объект управления; D – датчик регулируемого параметра; e(t) – ошибка регулирования; ji – корректирующие воздействия; u(t) – усиленное регулирующее воздействие; y(t) – регулируемый параметр.
Класифікація регуляторів. Регуляторы классифицируются в зависимости от назначения, принципа действия, конструктивных особенностей, вида используемой энергии и т.д. 1. По виду регулируемого параметра регуляторы бывают: температуры, давления, расхода. соотношения и т.д. 2. По конструктивным признакам: аппаратные, приборные, агрегатные, модульные (элементные). Аппаратный - устройство, работающее в комплекте с первичным измерительным преобразователем. Такой регулятор работает независимо от средств измерения данного технологического параметра. Приборный работает только в комплекте с вторичным измерительным прибором. Сигнал рассогласования на вход регулятора поступает с выхода вторичного измерительного прибора. Агрегатные регуляторы состоят из отдельных унифицированных блоков, выполняющих определенные функции. Модульные (элементные) состоят из отдельных модулей (элементов), выполняющих простейшие операции. 3. В зависимости от источника используемой энергии регуляторы подразделяются на регуляторы прямого и косвенного (непрямого) действия. В регуляторах прямого действия одновременно с измерением регулируемой величины от объекта регулирования отбирается часть энергии, которая используется для работы регулятора и воздействия на его исполнительный механизм. Таким образом в систему автоматического регулирования энергия извне не подводится. При использовании регуляторов косвенного действия энергия для их работы подводится извне. 4. В зависимости от вида используемой энергии регуляторы косвенного действия подразделяются: электрические, пневматические, гидравлические, комбинированные. Выбор регулятора по виду используемой энергии определяется характером объекта регулирования и особеностями автоматической системы. Элктрические применяются для регулирования на невзрывоопасных объектах при больших расстояниях от пункта управления до объекта регулирования. Сложность аппаратуры, которая требует высокой квалификации эксплуатационного и наладочного персонала.
Гидравлические применяются во взрыво- и пожароопасных зонах при непосредственном размещении элементов регулятора в зоне объекта регулирования. Надежны, большие развиваемые перестановочные усилия. Недостатки - потребность в специальном питании,ограниченный радиус действия, трудность реализации сложных законов регулирования. Комбинированные применяются в случаях, когда необходимы отдельные преимущества электро-, пневмо-, или гидрорегуляторов. 5. По характеру изменения регулирующего воздействия: регуляторы с линейным и нелинейным законами регулирования. 6. По роду действия регуляторы бывают дискретного и непрерывного действия. Дискретного: регулирующий орган перемещается только при достижении непрерывно изменяющейся регулируемой величиной определенных заданных значений, непрерывные - непрерывно в зависимости от изменения регулируемой величины. 7. По виду задающего воздействия на регулятор регуляторы делят на: а. Стабилизирующие- поддерживающие регулируемый параметр на определенном заданном значении во времени. б. Программные -поддерживающие параметр по заранее заданному закону во времени. в. Следящие -изменяющие регулируемый параметр в соответствии с законом изменения другого параметра или величины, меняющихся по неизвестному закону, который характеризует какой-либо другой процесс и является управляющим по отношению к регулируемому параметру. 8. По виду настройки регуляторы могут быть: а. с предварительной настройкой. Регулирующее воздействие формируется от заданного значения величины регулируемого параметра. б. с автоматической настройкой. Регулирующее воздействие формируется в результате автоматического поиска, т.е. в результате пробных регулирующих воздействий на объект. 9. По характеристике действия (зависимости между изменением регулируемой величины и перемещением регулирующего воздействия) подразделяются на: позиционные, пропорциональные, интегральные, пропорционально-интегральные, пропорционально-дифференциальные, пропорционально-интегрально-дифференциальные.
Позиционные регуляторы Регулятор, у которого регулирующий орган может занимать ограниченное число определенных положений, называется позиционным. Чаще всего применяются двух и трехпозиционные регуляторы.У двухпозиционных регуляторов, в зависимости от знака отклонения регулируемой величины, регулирующий орган либо полностью открыт, либо закрыт. Уравнение двухпозиционного регулятора: m = 0 при у > 0 m = 1 при у < 0 Статическая характеристика регулятора имеет вид: Реальные Пз-регуляторы имеют зону нечувствительности вследствие наличия ее у элемента сравнения и усилителя,входящих в состав регулятора. Кроме того в структуру регулятора вводят специально звенья,позволяющие изменять ширину этой зоны. Участки характеристики 2-3 и 5-6 соответствуют мгновенному перемещению регулирующего органа из положения " открыто" в положение "закрыто". Вид графика изменения регулируемой величины будет зависеть от типа объекта регулирования (статического или астатического). Вид графика:
Из графика следует, что при уменьшении зоны нечувствительности амплитуда А и период колебаний Т регулируемого параметра будут уменьшаться.При нейтральной зоне, стремящейся к нулю частота переключений регулирующего органа (f = 1/ T) будет бесконечно большой. Поэтому для уменьшения износа переключательной аппаратуры и регулирующего органа необходимо вводить зону нечувствительности, при которой амплитуда колебаний регулируемого параметра не выходила бы за допустимые пределы, а частота переключений обеспечивала достаточную надежность работы регулятора. Позиционные регуляторы выпускаются как аппаратного так и приборного типа. Простейшим критерием,исходя из которого может быть выбран позиционный закон регулирования, является отношение чистого запаздывания t к постоянной времени Т объекта управления. Позиционный закон выбирается при t / Т < 0.2. Пропорциональный регулятор Пропорциональным (статическим, П-регулятором) называется такой регулятор, у которого перемещение регулирующего органа (регулирующее воздействие) пропорционально отклонению регулируемого параметра от заданного значения, т.е. m = S1 Y = Кр Y, где S1 (Кр) - коэффициент усиления регулятора, являющийся его настроечным параметром. Передаточная функция регулятора: W(p) = S1 = Кр П-регуляторы могут быть прямого и косвенного действия. Для характеристики регулятора часто (особенно для пневматических) применяется величина обраная коэффициенту усиления - предел пропорциональности. Она выражается в процентах: d = (1 / Кр ) 100% Предел пропорциональности называют также диапазоном дросселирования и зоной регулирования. Статическая характеристика П-регулятора имеет вид: Чем меньше предел пропорциональности, тем при меньших значениях изменения регулируемой величины регулирующий орган перемещается из одного крайнего положения в другое. При d=0 пропорциональный регулятор превращается в двухпозиционный. Основным достоинством П-регулятора является простота и наличие пропорциональной зависимости между скоростью перемещения регулирующего органа и скоростью изменения регулируемой величины, что свидетельствует о его достаточном быстродействии. Недостатком регулятора является наличие статической ошибки, т.е. остаточного отклонения регулируемой величины, величина которого тем больше, чем больше предел пропорциональности регулятора. Временная характеристика регулятора имеет вид: Пунктиром представлена характеристика реального П-регулятора. Интегральный регулятор Интегральным или астатическим называется такой регулятор, у которого перемещение регулирующего органа (регулирующее воздействие) пропорционально интегралу отклонения регулируемого параметра от заданного значения: W(p) = So / p = 1 / Tир. Астатическим регулятор называется потому, что одному и тому же значению регулируемого параметра могут соответствовать различные положения регулирующего органа. So-коэффициент пропорциональности, представляющий скорость перемещения регулирующего органа при 100% отклонении регулируемого параметра. Ти(время интегрирования) -время перемещения регулирующего органа из одного крайнего положения в другое при 100% отклонении регулируемого параметра. При скачкообразном изменении Y на величину DY получим: m =(1 / Ти ) DY t Откуда видно, что временная характеристика регулятора -прямая линия, наклон которой зависит от Ти. Недостатком интегрального регулятора является относительно невысокая скорость регулирования. Достоинством -регулирование без остаточного отклонения (если объект статический, т.е. обладающий самовыравниванием). Если объект астатический, то система регулирования получается неустойчивой. Дифференциальные регуляторы (Д, ПД, ПИД) Реально такие регуляторы бывают двух видов: пропорционально-дифференциальные (ПД-) и пропорционально-интегрально-дифференциальные (ПИД-) регуляторы. Дифференциальные регуляторы еще называют регуляторами с предварением. Дифференциальными регуляторами называтся регуляторы, регулирующее воздействие которых содержит составляющую, пропорциональную скорости изменения регулируемой величины. Такие регуляторы целесообразно применять в тех случаях, когда нагрузка обьектов регулирования изменяется часто и быстро, а запаздывания велики. Уравнения регуляторов: где Тд -время дифференцирования. Часто используют величину Тп= Тд / Кр , которую называют временем предварения. Вид передаточных функций регуляторов: Временные характеристики регуляторов:
Пунктирные линии на графиках соответствуют временным характеристикам реальных регуляторов. Из графиков видно, что при скачкообразном изменении входного сигнала на выходе регуляторов в начальный момент резко возрастает сигнал, а затем, с течением времени,его величина определяется либо пропорциональной составляющей (для ПД-регулятора), либо пропорциональной и интегральной составляющими (для ПИД-регулятора). Время предварения -это интервал времени между моментами достижения регулятором одинаковых положений при наличии предварения и без него. Это хорошо видно из графика реакции ПД - регулятора на линейно нарастающий входной сигнал: Наклонная пунктирная линия на графике соответствует П-регулятору, т.е. регулятору без предварения. В регуляторах может быть прямое и обратное предварение. В регуляторах с обратным предварением дополнительный сигнал по производной вычитается из основного, уменьшая его и как бы увеличивая сигнал отрицательной обратной связи. При таком предварении, чем больше скорость изменения параметра, тем больше расширяются пределы пропорциональности и этим обеспечивается нужное качество регулирования. Когда регулируемый параметр перестает меняться, то пределы пропорциональности сужаются до величины настройки. Регуляторы с обратным предварением целесообразно применять для малоинерционных объектов, в которых после нанесения воздействия регулируемая величина меняется очень быстро.
Імпульсні регулятори. Импульсными называют регуляторы дискретного действия, в которых выходной сигнал регулятора представляется одним из параметров импульсной последовательности: амплитудой импульсов, их шириной, сдвигом фазы относительно опорного импульса, частотой следования импульсов. В соответствии с этим РУ реализуют следующие виды модуляции: амплитудно-импульсную (АИМ), широтно-импульсную (ШИМ), фазоимпульсную (ФИМ) и частотно-импульсную (ЧИМ). Структурные схемы:
Схема а) реализует регулятор с АИМ. Сигнал ошибки e[nТ] подается на вход РУ в моменты замыкания ключа КЭ. Частота замыкания ключа задается импульсами f[nТ], следующими в моменты времени nТ. Регулирующее воздействие в этом РУ может формироваться по двух- или трехпозиционному закону или по П -закону. Регулирующее воздействие формируется в момент замыкания ключа. После размыкания ключа регулирующее воздействие сохраняется таким, каким оно было сформировано в момент замыкания ключа. Схема б) реализует регулятор с ШИМ. Сигнал обратной связи Хос(t) в этом РУ интегрируется интегратором и сравнивается с задающим сигналом х(t). Процесс интегрирования сигнала обратной связи начинается в тактовые моменты времени nТ, при этом выходной сигнал регулятора устанавливается равным mmax. В момент равенства выходного сигнала интегратора и задающего сигнала срабатывает компаратор и устанавливает выходной сигнал регулятора в 0. Обнуление интегратора осуществляется импульсами f[nТ] в тактовые моменты времени nТ. Схема в) реализует фазоимпульсную модуляцию. Она отличается от предыдущей законом формирования выходного сигнала регулятора. В этой схеме в тактовые моменты nТ выходной сигнал регулятора устанавливается равным 0, а в момент срабатывания компаратора выходной сигнал РУ до прихода следующего (n+1)Т тактового импульса равен mmax. Схема г) реализует ЧИМ. В этой схеме интегрируется задающий сигнал х(t) и сравнивается компаратором КМ с сигналом Хос(t). В момент равенства сигналов интегратора и обратной связи компаратор формирует импульс, который обнуляет интегратор и запускает ИУ. Исполнительное устройство, в свою очередь, формирует импульс тока или мощности с заданными параметрами по длительности и амплитуде. Преимущества: возможность многоточечного управления, многократное использование линии связи, повышенную помехозащищенность. Хороши для управления многими однотипными объектами и объектами с большими постоянными времени, где можно использовать всего один регулятор, а также для управления объектами с большим временем запаздывания.
Полупропорциональное РУ Алгоритм функционирования устройства описывается уравнением:
d | e | / dt - производная модуля сигнала ошибки регулирования. Обладает свойством астатичности. Кроме того, такое РУ обеспечивает в системе регулирования больший запас устойчивости, что дает ему заметные преимущества в системах с объектами с большим значением отношения времени чистого запаздывания к постоянной времени объекта.
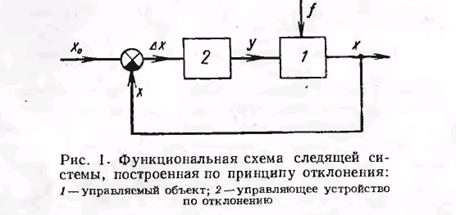
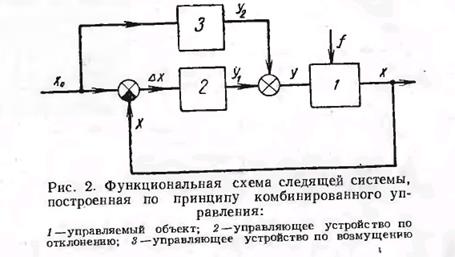
Слідкуючі системи (СС). Коефіцієнти похибок. При проектировании систем возникает необходимость оценки ошибки слежения в установившемся режиме при полиноминальном входном воздействии, являющемся аппроксимацией реальных воздействий на ограниченном интервале времени. В зависимости от вида передаточной функции фильтра системы эта ошибка может иметь конечное значение или изменяться с течением времени. Если ошибка изменяется с течением времени, для ее расчета используется метод разложения ошибки по производным входного воздействия.
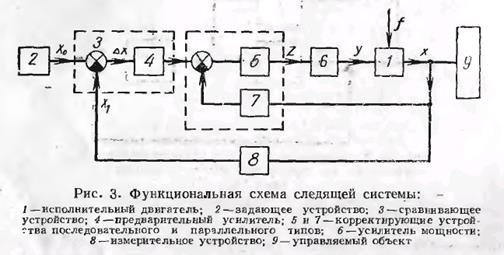
Структурні схеми СС.
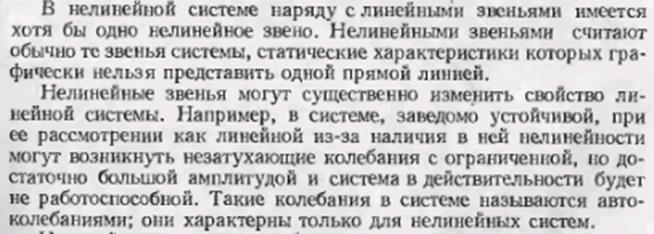
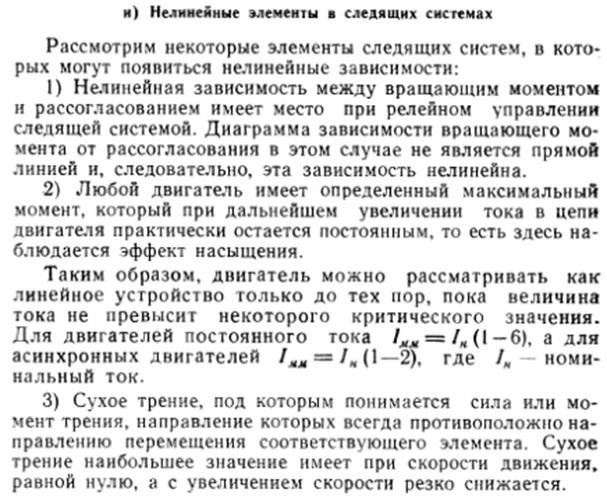
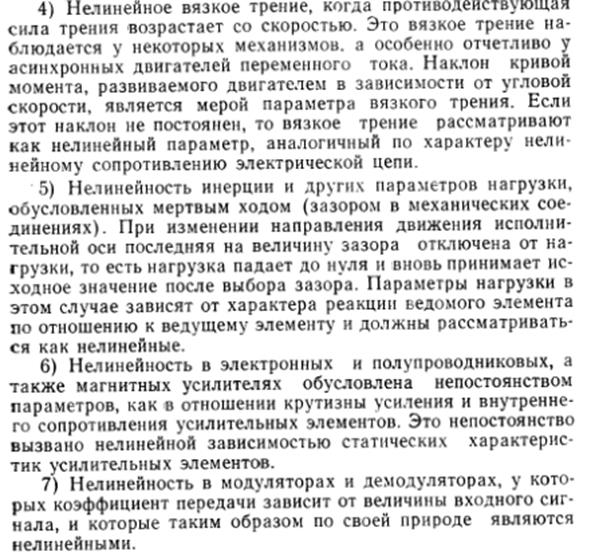
Нелінійні СС.
Методики проектування СС.
Реалізація СС. Класифікація СПУ.
19.2.
Рис. 7. Обобщенная структурная схема СЧПУ: 1 — устройство ввода программы; 2 — устройство реализации дополнительных функций; 3 — исполнительные элементы; 4 — привод подач; 5— датчик; 6 — устройство обратной связи; 7 — устройство обработки программы; 8 — устройство управления приводом.
Реалізація СПУ. Системы программного регулирования реализуются как станки с ЧПУ. Классификация ЧПУ: -станки ЧПУ с постоянной структурой - станки ЧПУ с изменяющейся структурой – универсальные станки. Системы числового программного управления(СЧПУ) используют в своей реализации следящие системы.
Методики проектування СПУ. Проектирование систем числового программного управления проводится выбором требуемых признаков из классификации: 1) по назначению: системы позиционные, прямоугольные, контурные (непрерывные), универсальные (комбинированные); 2) по числу потоков информации: системы незамкнутые, замкнутые, самоприспособляющиеся (адаптивные); 3) по принципу задания программы: с представлением программы в декодированном виде на магнитной ленте, в кодированном виде (в абсолютных координатах, в приращениях) на перфоленте и др., с передачей программы на станок непосредственно от центральной ЭВМ; 4) по типу привода: системы со ступенчатым приводом (только для позиционной и прямоугольной обработки), с регулируемым приводом (для позиционной и прямоугольной обработки), со следящим и с шаговым приводом; 5) по количеству одновременно управляемых координат: по одной, двум, трем, четырем и более координатам. Возможна классификация систем и по другим признакам. Загальні функції САК. САК решает следующие задачи - получение и представление информации о свойствах, техническом состоянии и пространственном расположении контролируемых объектов и состоянии технологической среды; - сравнение фактических значений параметров с заданными; - передача информации о рассогласованиях для принятия решений на различных уровнях управления; - получение и представление информации об исполнении функций.
Рис. 4 - Схема взаимосвязей подсистем ИПС 1 — контрольно-измерительная информация, 2 — управляющие воздействия; 3 — диагностическая информация; 4 — материальные потоки Программное обеспечение САК (ПО) состоит из: 1. ПО контроля за ходом процесса изготовления на конкретных рабочих местах ГПС; 2. ПО системы контроля как подсистемы управления: Программное обеспечение САК реализует следующие функции: 1. Автоматический сбор информации о фактическом выпуске деталей на контролируемом оборудовании; 2. Автоматический учет простоев оборудования и дифиренцирования по причинам; 3. Документированный вызов ремонтных служб цеха; 4. Выдачу оперативной информации о ходе производства, простоях линейному персоналу цеха в течении смены; 5. Автоматический прием и обработку информации о размерах деталей для управления ТП; 6. Автоматическую обработку информации приемного контроля. Принцип роботи. См 14.2 Методики синтезу. При синтезе НР основной центр тяжести падает на конструкцию из БЗ. Из теории ИС известно, что представление знаний в управляющих системах осуществляется логическим, реляционными, фреймовыми и продукционными языками. Мы будем основываться на продукционной модели описания знаний. Каждая продукция представляет собой фрагмент знаний вида - ситуация-действие. Левая часть каждой продукции рассматривается как конъюнкция элементарных условий, а правая часть как множество элементарных действий. Для регулятора, представленного на рис. 10.1 любое правило в БЗ может быть записано как: Если (eесть 1. Аналитические методы синтеза НР. 2. Лингвистический синтез НР. 3. Программная реализация НР. Біологічній нейрон.
Нервная система и мозг человека состоят из нейронов, соединенных между собой нервными волокнами. Нервные волокна способны передавать электрические импульсы между нейронами. Все процессы передачи раздражений от нашей кожи, ушей и глаз к мозгу, процессы мышления и управления действиями — все это реализовано в живом организме как передача электрических импульсов между нейронами. Нейрон (нервная клетка) является особой биологической клеткой, которая обрабатывает информацию. Он состоит из тела иотростков нервных волокон двух типов — депдритов, по которым принимаются импульсы, и единственного аксона, по которому нейрон может передавать импульс. Тело нейрона включает ядро, которое содержит информацию о наследственных свойствах, и плазму, обладающую молекулярными средствами для производства необхо-димых нейрону материалов. Нейрон получает сигналы (импульсы) от аксонов других нейронов через дендриты (приемники) и передает сигналы, сгенерированные телом клетки, вдоль своего аксона (передатчика), который в конце разветвляется на волокна. На окончаниях этих волокон находятся специальные образования — синапсы, которые влияют на силу импульса. Аксон — обычно длинный отросток, приспособленный для проведения возбуждения от тела нейрона. Дендриты — как правило, короткие и сильно разветвлённые отростки, служащие главным местом образования влияющих на нейрон возбуждающих и тормозных синапсов (разные нейроны имеют различное соотношение длины аксона и дендритов). Нейрон может иметь несколько дендритов и обычно только один аксон. Один нейрон может иметь связи со многими (до 20-и тысяч) другими нейронами.Синапс — место контакта между двумя нейронами или между нейроном и получающей сигнал эффекторной клеткой. Служит для передачи нервного импульса между двумя клетками, причём в ходе синаптической передачи амплитуда и частота сигнала могут регулироваться. Одни синапсы вызывают деполяризацию нейрона, другие — гиперполяризацию; первые являются возбуждающими, вторые — тормозными. Обычно для возбуждения нейрона необходимо раздражение от нескольких возбуждающих синапсов.
Модель нейрона. Нейрон — это составная часть нейронной сети (НС). В состав нейрона входят умножители (синапсы), сумматор и нелинейный преобразователь. Синапсы осуществляют связь между нейронами и умножают входной сигнал на число, характеризующее силу связи, — вес синапса. Сумматор выполняет сложение сигналов, поступающих по синаптическим связям от других нейронов, и внешних входных сигналов. Нелинейный преобразователь реализует нелинейную функцию одного аргумента — выхода сумматора. Эта функция называется функцией активации или передаточной функцией нейрона. Нейрон в целом реализует скалярную функцию векторного аргумента. В общем случае входной сигнал, весовые коэффициенты и значения смещения могут принимать вещественные значения. Выход определяется видом функции активации и может быть как действительным, так и целым. Во многих практических задачах входы, веса и смещения могут принимать лишь некоторые фиксированные значения. Синаптические связи с положительными весами называют возбуж дающими, с отрицательными весами — тормозящими. Таким образом, нейрон полностью описывается своими весами w, и передаточной функцией W(s). Получив набор чисел (вектор) х, в качестве входов, нейрон выдает некоторое число y на выходе. Базовийпроцесорнийелемент. В якості центрального процесорного елемента нейромережі виступає нейронний елемент, що здійснює нелінійне перетворення над сигналом його внутрішнього збудження. Незалежно від способу навчання нейромережі, для кожної точки-реалізації навчальної множини можливо вирахувати сигнали внутрішнього збудження всіх нейронів. Модель нейрона - процессорного элемента нейронной сети, представлена на рис. В соответствии с вышеизложенным нейрон имеет набор входов, на которые поступают входные сигналы (Si,...,Sn). Входы характеризуются вектором весовых коэффициентов (W1,...,Wn). На рис.2,6 показаны некоторые возможные виды переходной функции f, вычисляемой от суммы взвешенных входных сигналов: пороговая, сигмовидная, псевдолинейная.
В зависимости от вида переходной функции нейроны делятся на два класса: детерминистские и вероятностные. Различают два типа детерминистских нейронов: 1. Нейрон, в теле которого вычисляется скалярное произведение, (полностью соответствует рис.2, а). Это наиболее широко используемый тип нейрона. Он применяется в нейронных сетях для решения задач классификации и прогнозирования, а также для создания моделей ассоциативной памяти. Перцепрони. Перцептрон — математическая и компьютерная модель восприятия информации мозгом (кибернетическая модель мозга), предложенная Фрэнком Розенблаттом. Несмотря на свою простоту, перцептрон способен обучаться и решать довольно сложные задачи. Перцептрон состоит из трёх типов элементов, а именно: поступающие от сенсоров сигналы передаются ассоциативным элементам, а затем реагирующим элементам. Таким образом, перцептроны позволяют создать набор«ассоциаций» между входными стимулами и необходимой реакцией на выходе. В биологическом плане это соответствует преобразованию, например, зрительной информации в физиологический ответ от двигательных нейронов. Согласно современной терминологии, перцептроны могут быть классифицированы как искусственные нейронные сети:
Элементарный перцептрон состоит из элементов 3-х типов: S-элементов, A-элементов и одного R-элемента: · S-элементы — это слой сенсоров, или рецепторов. В физическом воплощении они соответствуют, например, светочувствительным клеткамсетчатки глаза или фоторезисторам матрицы камеры. Каждый рецептор может находиться в одном из двух состояний — покоя или возбуждения, и только в последнем случае он передаёт единичный сигнал в следующий слой, ассоциативным элементам. · A-элементы называются ассоциативными, потому что каждому такому элементу, как правило, соответствует целый набор (ассоциация) S-элементов. A-элемент активизируется, как только количество сигналов от S-элементов на его входе превысило некоторую величину θ. Таким образом, если набор соответствующих S-элементов располагается на сенсорном поле в форме буквы «Д», A-элемент активизируется, если достаточное количество рецепторов сообщило о появлении «белого пятна света» в их окрестности, то есть A-элемент будет как бы ассоциирован с наличием/отсутствием буквы «Д» в некоторой области. · Сигналы от возбудившихся A-элементов, в свою очередь, передаются в сумматор R, причём сигнал от i-го ассоциативного элемента передаётся с коэффициентом wi. Этот коэффициент называется весом A—R связи.
НейромережаХопфілда. Нейро́нная сеть Хо́пфилда — полносвязная нейронная сеть с симметричной матрицей связей. В процессе работы динамика таких сетей сходится (конвергирует) к одному из положений равновесия. Эти положения равновесия являютсялокальными минимумами функционала, называемого энергией сети (в простейшем случае — локальными минимумами отрицательно определённой квадратичной формы на n-мерном кубе). В отличие от многих нейронных сетей, работающих до получения ответа через определённое количество тактов, сети Хопфилда работают до достижения равновесия, когда следующее состояние сети в точности равно предыдущему: начальное состояние является входным образом, а при равновесии получают выходной образ. Одна из первых предложенных моделей сети Хопфилда используется как ассоциативная память. Исходными данными для расчета значений синаптических весов сети являются векторы — образцы классов. Сеть функционирует циклически. Выход каждого из нейронов подается на входы всех остальных нейронов. Нейроны сети имеют жесткие пороговые функции.
Рис. 1. Сеть Хопфилда
Рис. 2. Передаточная функция сети Хопфилда Области применения: · ассоциативная память, адресуемая по содержанию · задачи распознавания образов · задачи оптимизации. Недостатки: · небольшая емкость; · наряду с запомненными образами в сети хранятся и их негативы; · размерность и тип входных сигналов с точностью совпадают с размерностью и типом выходных сигналов. Это существенно ограничивает применение сети в задаче распознавания образов. · при использовании коррелированных векторов-образцов возможно зацикливание сети в процессе функционирования. · Квадратичный рост числа синапсов при увеличении размерности входного сигнала.
Тема 1. Регулятори. Призначення автоматичних регуляторів. Автоматический регулятор - это средство автоматизации, получающее, усиливающее, и преобразующее сигнал отклонения регулируемой величины и целенаправленно воздействующее на объект регулирования. Он обеспечивает поддержание заданного значения регулируемой величины или изменение ее значения по заданному закону.
|
||||||||||||||
|
|
Последнее изменение этой страницы: 2019-05-20; просмотров: 548; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.214 (0.015 с.) |


 Пневматические регуляторы применяются во взрыво- и пожароопасных зонах при небольших расстояниях (до 300 м) от пункта управления до объекта регулирования. Простота в обслуживании и наладке. Потребность в специальном источнике питания, жесткие требования к его качеству, большая инерционность.
Пневматические регуляторы применяются во взрыво- и пожароопасных зонах при небольших расстояниях (до 300 м) от пункта управления до объекта регулирования. Простота в обслуживании и наладке. Потребность в специальном источнике питания, жесткие требования к его качеству, большая инерционность.



 , где m0 -регулирующее воздействие при исходном положении регулирующего органа. Передаточная функция регулятора имеет вид:
, где m0 -регулирующее воздействие при исходном положении регулирующего органа. Передаточная функция регулятора имеет вид:
 - ПД-регулятор
- ПД-регулятор - ПИД -регулятор,
- ПИД -регулятор,




 где
где  – коэффициенты ошибки:
– коэффициенты ошибки: ;
;  ;
;  ;
;  .
. - коэффициент ошибки по положению;
- коэффициент ошибки по положению;  - коэффициент ошибки по скорости;
- коэффициент ошибки по скорости; - коэффициент ошибки по ускорению;
- коэффициент ошибки по ускорению;  - коэффициент ошибки по l-ой производной входного воздействия.
- коэффициент ошибки по l-ой производной входного воздействия.  - ошибка по положению;
- ошибка по положению;  - по скорости;
- по скорости; - по ускорению.
- по ускорению.





 Структурні схеми СПУ.
Структурні схеми СПУ. 1*) и (
1*) и ( , u- переменные,
, u- переменные,  1*,
1*,