
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Мікроектронна система АБ-Е1.Содержание книги
Поиск на нашем сайте
В склад аппаратури сигнальної точки автоблокування входят: блоки прийомопередатчиків непреривного канала звязку (БПП-НКС) та системи передачі информації по проводной лінії звязку (БПП-СПИ); мікропроцессорний колійний приймач (МКП); пристрої захисту і узгодження з рейковою лінією (УЗС) і проводної лінії звязку (УЗЛЗ). УЗС включає в себе трансформатор підсилювача потужності БПП-НКС (ТКУ), дроссель згодження (ДС), електронний блок захисту (БЗЕ) і блоки конденсаторів БК-1 і БК-2. Конструктивно мікроелектронна аппаратура автоблокування виповнена у вигляді металевих корпусів, усередині яких розміщуються типові елементи заміни. Розміри аппаратуры АБ-Е1 такі: БПП-НКС і БПП-СПИ - 500x332x230 мм; МПП- 420x332x230мм; УЗСЛ- 195x120x140мм; блоки ДС, БК-1, БК- 2 і ТКУ- 145x120x115 мм. Автоблокування АБ-Е1 функціонально і електромагнітно змістка з автоматичною локомотивною сигналізацією АЛС-ЕН. Для підвищення стійкості функціонування системи КРЛ в умовах дії дестабілізуючих чинників обробка сигналів в приймачі здійснюється по алгоритму кумулятивных сум. Завдяки його застосуванню вдалося забезпечити стійку роботу рейкового ланцюга завдовжки 2500 м при коливаннях опору баласту від 50 до 0,45 Ом·км. Проблема забезпечення безпеки мікроелектронних апаратных засобів автоблокування вирішується застосуванням: трьохкомплектного резервування стандартних модулів, що виконують однакові функції; мажоритарної структури побудови для виявлення неробочого комплекту, що відмовив; жорсткої синхронізації і потактного порівняння сигналів в контрольних точках різних комуплектов; спеціальних пристроїв контролю з односторонніми відмовами, що забезпечують надійне відключення несправного комплекту і наступне його введення в роботу. У системі АБ-Е1 використаний один безперервний частотний канал (НКС) з тією, що несе 174,38 Гц. Передача інформації здійснюється в результаті двократної фазорізностної маніпуляції і кодування повідомлень модифікованим кодом Бауера. Структура організації кодового циклу паралельна: по одному підканалу передаються кодові комбінації (КК), а по іншому - сигнали циклової синхронізації (ЦС) у вигляді синхрогрупп (СГ). Застосування двократної ФРМ дозволяє підвищити перешкодостійкість в 2 рази в порівнянні з амплітудною модуляцією. Використані комбінації коду Бауера в інформаційному і синхропідканалах забезпечуе ефективний кодовий захист. У структурній схемі двох сигнальних точок мікроелектронного автоблокування АБ-Е1 показані: блоки прийомопередатчіков сигналів безперервного каналу зв'язку і системи передачі информації по лінійному ланцюгу; мікропроцесорний шляховий приймач; забезпечує захист і узгодження з рейковою лінією; колійне МП, сигнальні реле 30, 31, 32, реле подвійного зниження напруги ДСН і сповіщення про наближення потягів ИП1-ИПЗ. Усі перераховані реле нейтральні АНШ2- 1230. Приймач МПП призначений для контролю стану рейкової лінії. При її вільному і справному стані збуджується реле МП. Якщо рейкова лінія зайнята рухливим складом або несправна, то реле МП знеструмлене. Блок БПП-НКС призначений для демодуляції і декодування ФРМ-сигналів, управління сигнальними реле, формування і усиления сигналів, що передаються в рейкове коло сусідньої блок-дільниці. Блок БПП-НКС розрахований на підключення чотирьох сигнальних реле. Проте реально в БПП-НКС використовуються тільки три: 30, 31 і 32. Набудівництво блоків приймачів для формування синхрогрупп і кодових комбінацій залежно від числа вільних блок-дільниць і дозволеній швидкості руху здійснюється настроювальними перемичками НП. Пристрій УЗС розроблений з урахуванням забезпечення вимог електромагнітної сумісності системи АБ-Е1 з апаратурою автоблокування числового коду. Живлення мікроелектронних; блоків БПП-НКС, БПП-СПИ і МПП здійснюється через знижувальні трансформатори ТП (ПОБС-5А). Для захисту пристроїв від дії імпульсних перешкод по ланцюгах живлення в первинні обмотки ТП включені мережеві фильтри СФ. Електропостачання сигнальної точки автоблокування відбувається від високовольтної лінії. Потужність, споживана одинічною сигнальною точкою, не перевищує 80 В·А.
ВИСНОВОК Розглянуті вище системи АБ розроблені з урахуванням використання електромагнітних реле і ряду напівпровідникових елементів. Це обмежує функціональні можливості і надійність функціонування систем, що не повною мірою задовольняє вимогам, пропонованим до сучасних пристроїв інтервального регулювання руху поїздів. Тому для своєї ділянки залізниці я обираю систему з тональними рейковими колами АБТЦ-У. Система АБТЦ-У дозволяє підвищити безпеку руху поїздів через наявність захисних ділянок за кожним поїздом. Застосування в даних системах рейкових кіл тональної частоти і необхідність їхньої розробки була викликана тим, що на деяких ділянках мережі залізниць через низький опір баласту, негативного впливу гармонік тягового струму і стану ізолюючих стиків робота кодових рейкових кіл дуже хитлива. Такий стан рейкових кіл систем АБ приводило до зниження як пропускної здатності ділянок так і умов безпеки руху поїздів. Найбільш ефективним заходом підвищення працездатності АБ с використання тональних рейкових кіл без ізолюючих стиків, здатних функціонувати при зниженому опорі баласту до 0,04 Ом * км. Використання ТРК дозволяє значно знизити споживану потужність, застосовувати для побудови апаратури сучасну елементну базу і забезпечити надійний захист прийомних пристроїв від впливу гармонійних і імпульсних перешкод тягового струму.
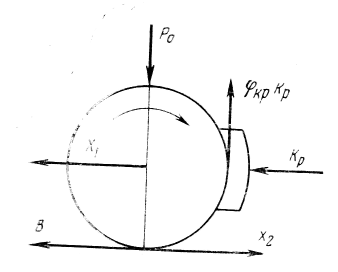
1.2ТЯГОВІ РОЗРАХУНКИ Тягові розрахунки дозволяють вирішити широке коло задач, виникаючих при будівництві і експлуатації залізниць. Застосовано до пристроїв залізничної автоматики і телемеханіки тягові розрахунки є основою для розставляння світлофорів автоблокування, або кордонів блок-дільниць ЦАБ, проектування пристроїв автоматичної локомотивної сигналізації з контролем швидкості руху потяга, а також більш сучасних систем інтервального регулювання руху потягів. Початковими даними для тягових розрахунків є: · - серія локомотива: ВЛ82 · - вага локомотива, кН: 1900 · - рід потяга: вантажний · - вага складу, кН: 28000 · - чотирьохвісних вагонів в складі: 60% · - шестивісних вагонів в складі: 40% · - тип гальмових колодок: композиційні. При тягових розрахунках враховуються всі сили, діючі на потяг: сила тяги локомотива, гальмова сила і сила опору руху. Сила тяги.Двигун локомотива створює обертаючий момент або пару сил F1 і F2, прикладених до колеса локомотива (рис. 1.).
Згідно із законом дії і протидії з боку рейки на колесо виникає горизонтальна сила реакції FK, рівна силі F2 і направлена в протилежну сторону. Отже, сили F2 і FK урівноважуються, а F1 залишається неврівноваженої і повідомляє локомотиву поступальний рух. Одночасно сила F1 спричиняє обертання колеса відносно миттєвого центра в точці дотику з рейкою. Сила тяги локомотива F1 обмежується силою тертя між колесом і рейкою. Тому значення дотичної сили тяги
За основні приймають опір, який випробовує потяг при русі по прямому горизонтальному шляху в нормальних метеорологічних умовах (температура повітря від -20 до +25°С і швидкість вітру до 10м/с). Додатковий опір виникає при руху потяга на підйом, по кривих дільницях колії і в метеорологічних умовах, відмінних від нормальних. Основний опір утвориться за рахунок тертя між шийками осей і підшипниками, колесами і рейками, а також від ударів коліс на стиках рейок і впливу повітряного середовища. При розрахунку опору для завантажених чотирьохвісних вагонів на підшипниках ковзання і шестивісних вагонів на роликових підшипниках використовуються залежність питомого основного опору, Н/кН, від швидкості рушення v ( км/г) і від навантаження осі на рейки q0
Для електровозів при працюючих двигунах:
Для електровозів на холостому ходу:
Істотне збільшення опору спостерігається, при зворушенні складу з місця внаслідок зменшення шару змазки в підшипниках і збільшення її в'язкості за час стоянки. Тому при визначенні можливості зворушення складу з місця для підшипників ковзання опір руху визначається по формулі:
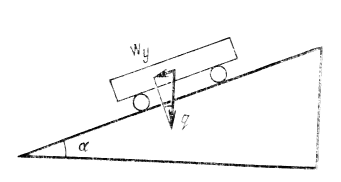
Опір від схилу колії WУ визначається як паралельна колії складова сили тяги. Тому,
де q - сила тяги одиниці рухомого складу (кН), а i - схил колії ( Питомий опір від схилу дорівнює величині схилу
При русі на підйом додатковий опір від схилу приймається з позитивним знаком, а при русі по спуску - з негативним. У розрахунках зручно замінювати опір від кривої опором еквівалентного підйому, використовується поняття приведеного схилу
Повний опір руху потяга
і відповідна питома величина
де Р і Q - вага локомотива і складу, кН.
Основним засобом створення таких сил є гальмові колодки, що притискуються до обода коліс. Крім цього ефект гальмування можна створити роботою двигунів в режимі генераторів, що використовують кінетичну енергію потяга. Отриману таким способом електричну енергію, можна використати на нагрів реостатів (реостатне гальмування) або повернути в контактну мережу (рекуперативне гальмування). У розрахунках при швидкостях рушення потягів до 160 км/г враховується тільки гальмова сила, що створюється натисненням колодок. Якщо до обода колеса, що обертається притиснути з силою K гальмову колодку, то між нею і колесом виникне сила тертя, направлена по дотичній в сторону, протилежну обертанню, і рівна Сила тертя створюється відносно центра колеса момент, перешкоджаючий обертанню і викликаючи реакцію, рейки Гальмова сила потяга визначається як сума сил, що створюються всіма гальмовими колодками,
а відповідна питома гальмова сила
Величина
Приведений коефіцієнт тертя для композиційних колодок визначається по формулі:
У розрахунках, де враховується застосування екстреного гальмування, значення розрахункового гальмового коефіцієнта приймається рівним його повній величині. У разі застосування повного службового гальмування значення розрахункового гальмового коефіцієнта потрібно приймати рівним 0,8 його повної величини. При побудові кривої швидкості потяга гальмова сила визначається по службовому гальмуванню, для якого у вантажних потягах гальмовий коефіцієнт приймається рівним 0,5 його повній величини. У залежності від співвідношення розглянутих вище сил потяг може рухатися в трьох режимах. У режимі тяги рівнодіюча сила рівна Fk
Залежність прискорення потяга від питомої рівнодіючої сили: З метою спрощення розрахунків ПТР рекомендують прискорення потяга що створюється силою 1Н/кН, приймати рівним 120 км/г2. У результаті отримуємо диференціальне рівняння руху потяга:
Інтегрування рівняння рушення потяга дозволяє знайти залежність між швидкістю V, часом t і пройденою відстанню S. На основі цих співвідношень графічними розрахунками отримують залежності швидкості і часу ходу потяга від пройденого шляху. Для побудови діаграми складається таблиця 1, в якій стовпці 1 і 2 заповнюються за даними тягової характеристики локомотива з ПТР. У стовпець 1 включаються швидкості від 0 до конструкційної з кроком 10км/г. Стовпець 2 заповнюється величинами сили тяги локомотива, відповідними вибраній швидкості. Дані інших стовпців визначаються розрахунками. Таблиця1.
Рис.4 Диграма прискорюючих сил. Таблиця дозволяє побудувати криві прискорюючих сил для трьох режимів: тяги fk-w0=f1(v), пробігу w0x=f2(v) і гальмування 0.5вт+w0x=f3(v). Позитивна частина кривої розташовується зліва від осі координат і відповідає області, в якій швидкість потяга може збільшуватися. Точка перетину цієї кривої з віссю координат fk-w0=0 відповідає рушенню з равновісною швидкістю, вище за яку даний потяг на заданому схилі розганятися не може. У режимах пробігу і гальмування на потяг впливають сили, що сповільнюють його рух. Тому криві w0x=f2(v) і 0.5вт+w0x=f3(v) потрібно розташовувати праворуч від осі координат. Отримані криві відповідають руху потяга по прямій горизонтальній дільниці колії. Для визначення сили, діючої на потяг, при русі його на підйом необхідно пересунути вісь ординат ліворуч, а при спуску - праворуч, відповідно величині схилу. Діаграма прискорюючих сил (мал. 1.4) використовується для побудови кривої швидкості представленої на листі 1, для цього заздалегідь викреслюється діаграма, а також спрямлений профіль дільниці. 1.2.1. Розстановка світлофорів. Місця встановки світлофорів визначають по розрахунковому інтервалу між попутно слідуючими поїздами з коректуванням довжинн блок-ділянок на відповідність тормозним шляхам та місцевим умовам. При цьому можливі два способи розстановки світлофорів: 1) по зарубкам часу на кривій скорості розрахункового поїзда; 2) за допомогою кривих часу, побудованих для хвосту першого і голови другого поїздів. Перший спосіб як найбільш простий отримав переважне розповсюдження. Відповідно до діючої методики розстановка світлофорів автоблокування проводиться по кривій швидкості розрахункового вантажного потягу, а на приміських ділянках розрахункового приміського потягу. Після побудови кривої швидкості визначається мінімальний інтервал між попутними поїздами, який може бути реалізований на заданій ділянці в місцях, прохідних поїздом з як найменшою швидкістю, а саме: на підйомах, виходах із станцій, де розрахунковий поїзд має зупинку. При цьому як мінімальне розрахункове вибирається найбільший зі всіх інтервалів, отриманих на ділянці. Найпростіший спосіб визначення мінімального розрахункового інтервалу по кривій швидкості із зарубками часу. Ділянки, проходимі поїздом з як найменшою середньою швидкістю, розташовані при відправленні із ст. А і на підйомі 2.4 ‰. В першому випадку, відклавши від точки початку руху поїзду відстань мінімального зближення Lз=lп+3lбз=1050+3000=4050 м, отримаю по зарубках часу величину інтервалу I3/3=6.2 хв. Заданий інтервал рівний 7 хв. З двох інтервалів вибираю найбільший і приймаю його як мінімальний розрахунковий. Розстановку світлофорів визначають по розрахунковому інтервалу між попутно слідуючими поїздами з коректуванням довжин блок-ділянок на відповідність гальмівним шляхам, видимості сигналів і місцевим умовам. Розстановку світлофорів проводитиму по зарубках часу на кривій швидкості розрахункового потягу. За завданням: довжина потягу 1050 м. При заданому розрахунковому інтервалі I=7хв. На кривій швидкості знаходимо зарубку 7 хв., відповідну заданому інтервалу і, відклавши від неї відстань lп/2=525 м в напрямі, протилежному руху потягу, отримаю місце установки світлофора І серії. В результаті час руху потягу 1 від моменту розташування голови перед вихідним сигналом НІ ст. А і до проходу хвоста за сигнал І серії рівно розрахунковому інтервалу, після закінчення якого із ст. А можна відправляти наступний потяг 2. Проте для того, щоб потяг 2 слідував за поїздом 1 з трьохблоковим розмежуванням, необхідно розділити відрізок колії, розташований між світлофором НІ і сигналом 1, на три блок-ділянки з установкою на їх межах світлофорів ІІ і ІІІ серій. Для визначення місць розташування цих світлофорів по хвилинних зарубках обчислюю час ходу потягу від світлофора НІ до світлофора І серії і ділю його на три рівні частини. Координаті вихідного світлофора відповідає відмітка 1.32 хв. на кривій швидкості, а координаті світлофора І серії-6.33 хв. Тому величина шуканого проміжку часу ti= Віднімаючи отриману величину tі з відмітки часу на координаті світлофора І серії, отримаю (6.33-1.40=4.53 хв.) відмітку часу, відповідну місцю установки світлофора ІІ серії. Додавши до відмітки часу 1.32 хв. на координаті вихідного світлофора НІ проміжок часу tі=1.40 хв., отримаю (1.32+1.40=3.12 хв.) відмітку часу, яка визначає місце установки світлофора ІІІ серії. У момент наближення голови потягу 2 до світлофора ІІІ серії хвіст потягу 1, що йде попереду із заданим інтервалом I=7хв., повинен знаходитися за наступним світлофором ІІІ серії. Тому від знайденої координати світлофора ІІІ серії відкладу вліво відстань lп/2=525 м і знайду зарубку часу на кривій швидкості (2хв11сек). Додаючи до цієї зарубки заданий інтервал, отримаю зарубку часу (2.11+7=9.11хв), відповідну координаті розташування центру тягаря попереду потягу, що йде, 1. Далі, відклавши ліворуч від цієї крапки відстань lп/2=525 м, отримаю координату другого світлофора ІІІ серії. Аналогічно визначаються місця установки наступних світлофорів ІІІ серії, а також І і ІІ серій на всьому протязі перегону. Світлофори для руху потягів в протилежному напрямі розстановлюю аналогічно, використовуючи криву швидкості із зарубками часу. Після закінчення розстановки нумерую світлофори автоблокування, починаючи від вхідних сигналів: в парному напрямі парними порядковими номерами, а в непарному - непарними. Відповідно до норм проектування довжина блок-ділянок тризначного автоблокування повинна бути не менше найбільшого гальмівного шляху, визначуваного при максимальній швидкості потягу при повному службовому або екстреному автостопному гальмуванні, але не менше 1000м. Для забезпечення стійкої роботи рейкових кіл довжина будь-якої блок-ділянки не повинна перевищувати 2500м. З метою скорочення інтервалу між поїздами у разі прийому попереду потягу, що йде, на станцію із зупинкою довжина блок-ділянки між вхідним і попредвхідним світлофорами не повинна перевищувати 1500м. Оскільки довжини деяких блок-ділянок мого перегону не відповідає нормам проектування, проведу їх коректування. Після коректування відстань між попредвхідним і вхідним світлофорами перевищило норму, тому я встановив додатковий світлофор, діючи відповідно до норм проектування.
|
|||||||
|
|
Последнее изменение этой страницы: 2016-04-07; просмотров: 268; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.227.134.95 (0.012 с.) |


 не повинно перевищувати добутку коефіцієнта зчеплення
не повинно перевищувати добутку коефіцієнта зчеплення  на навантаження
на навантаження  що доводиться від колеса на рейку, тобто
що доводиться від колеса на рейку, тобто  (1)
(1) Коефіцієнт зчеплення залежить від багатьох факторів (стану поверхонь коліс і рейок, погодних умов, швидкості руху). Для розрахунку коефіцієнта зчеплення електровозів змінного струму при швидкостях від 40 до 150 км/г використовують формулу, отриману на основі математичної обробки численних вимірювань. Сили опору руху
Коефіцієнт зчеплення залежить від багатьох факторів (стану поверхонь коліс і рейок, погодних умов, швидкості руху). Для розрахунку коефіцієнта зчеплення електровозів змінного струму при швидкостях від 40 до 150 км/г використовують формулу, отриману на основі математичної обробки численних вимірювань. Сили опору руху  (2). Сили опору направлені в сторону, протилежну руху потяга, і розділені на основні і додаткові (Рис.2).
(2). Сили опору направлені в сторону, протилежну руху потяга, і розділені на основні і додаткові (Рис.2). (3)
(3) (4)
(4) (5)
(5) (6)
(6) (7)
(7) ).
). . (8)
. (8) .(9)
.(9) (10)
(10) (11)
(11) Гальмова сила потяга. Гальмування потяга здійснюється силами, що штучно створюються, направленими проти руху (Рис.3).
Гальмова сила потяга. Гальмування потяга здійснюється силами, що штучно створюються, направленими проти руху (Рис.3). (12), де
(12), де  - коефіцієнт тертя між колесом і колодкою.
- коефіцієнт тертя між колесом і колодкою. (13), яка і є гальмовою силою.
(13), яка і є гальмовою силою. ,(14)
,(14) (15)
(15) називається гальмовим коефіцієнтом і для кожного потяга є постійною, причому у вантажних потягів на спусках не крутіше за 20
називається гальмовим коефіцієнтом і для кожного потяга є постійною, причому у вантажних потягів на спусках не крутіше за 20  (16)
(16) Wk, а при гальмуванні -
Wk, а при гальмуванні -  .(17)
.(17) (18)
(18) (fk
(fk 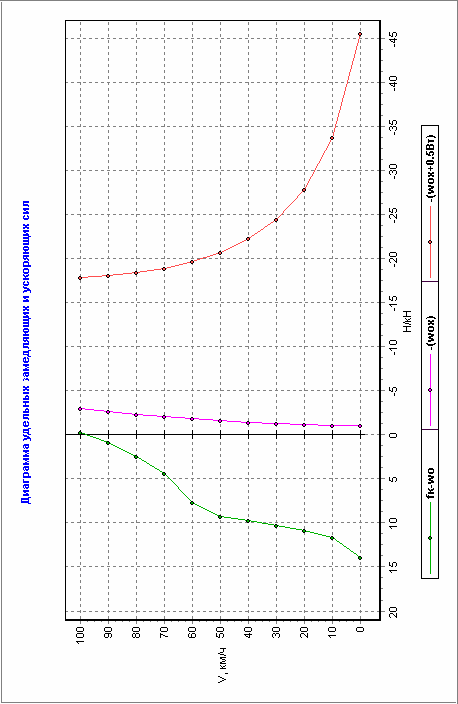
 хв.(20)
хв.(20)


