
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Автоматизация – это высшая ступень механизации, применяемая непосредственно в производстве.Содержание книги
Поиск на нашем сайте
Вопрос-1 Основные понятия и определения теории автоматического управления Автоматика- отрасль науки и техники охватывающая совокупность методов и технических ср-в освобождающих человека от непосредственного выполнения операций по контролю и управлению производственными процессами и техническими устройствами. Теория автоматического управления(ТАУ)- это научно техническая дисциплина, в рамках которой изучаются процессы управления, методы исследования и основы проектирования САУ. Управление- это процесс, обеспечивающий необходимое по целевому назначению протекания процессов преобразование в-ва информации, поддержание работоспособности и безаварийности функционирования объекта путем сбора и обработки информации состоянии объекта и внешней среды, выработки решений о воздействии на объект и их испытании. Автоматизация – это высшая ступень механизации, применяемая непосредственно в производстве. Регулирование – это поддержание одного или нескольких процессов. Простая функция, чем управление. САУ – это замкнутая динамическая система, состоящая из ОУ и автоматического регулятора или контроллера. Виды систем автоматизации производства Автоматический контроль (автоматические сигнализацию, измерение, сортирование и сбор информации). Автоматическая сигнализация предназначена для оповещения обслуживающего персонала о предельных или аварийных значениях каких-либо физических параметров, месте и характере нарушений ТП. Автоматическое измерение служит для измерения и передачи на специальные указательные или регистрирующие приборы значений физических величин, характеризующих ТП или работу машин. Автоматическое сортирование предназначено для контроля и разделения продукции по размеру, массе, твердости, вязкости и другим показателям Автоматический сбор информации необходим для получения информации о ходе ТП, качестве и количестве выпускаемой продукции и для дальнейшей обработки, хранения и выдачи информации обслуживающему персоналу. Автоматическая защита представляет собой совокупность технических средств, которые при возникновении ненормальных или аварийных режимов либо прекращают контролируемый производственный процесс (сигнализация, оповещение световые звуковые).
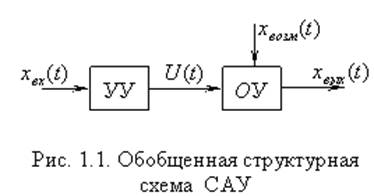
Дистанционное управление объединяет в себе методы и технические средства управления установками и различными объектами на расстоянии. Импульсы на управление подаются персоналом по линиям связи с помощью соответствующих кнопок, ключей и другой командной аппаратуры. Автоматическое регулирование – это поддержание одного или нескольких процессов. Классификация. 1. По виду использования энергии: -электрические -пневматические -гидравлические 2. По принципу управления: -замкнутые-разомкнутые -комбинированные 3. По принципу действия: -прямого -непрямого 4. По величине установившейся ошибки: -статические -астатические 5. По виду задающегося сигнала: -система стабилизации -программное управление -следящие системы -адаптированные системы 2…..2. Обобщенная структурная схема САУ Система автоматического управления (рис 1.1) содержит: устройство управления (УУ) или регулятор, на вход которого подается задающее воздействие (входной сигнал или совокупность сигналов) хвх(t). Задающее воздействие определяет требуемый закон управления. В результате этого воздействия на выходе регулятора вырабатывает управляющее воздействие U(t), которое поступает на вход объекта управления (ОУ).
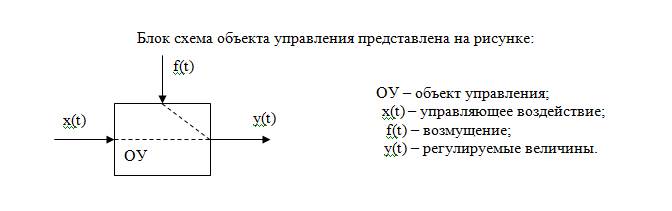
Под ОУ в данном курсе понимается любое техническое устройство (станок, самолет, турбина и т.д.), для функционирования которого необходимы специально организованные воздействия U(t). Качество управления оценивается по значению выходной величины объекта хвых(t) – это обычно главный технологический параметр (скорость, мощность, производительность и т.д.).Наряду с хвх(t), внешним по отношению к рассматриваемой САУ явяляются возмущающее воздействиехвозм(t), которое, как и U(t), приложено к ОУ. К числу таких возмущений можно отнести момент сопротивления при металлообработке, колебание напряжения в сети, ветровую нагрузку и т.д. Возмущающие воздействия искажают требуемый закон управления. Очевидно, что в первом приближении задача синтеза САУ состоит в разработке такого УУ, с которым и при наличии существенных возмущающих воздействий отклонение требуемого закона управления ОУ от фактического не превышает допустимых значений. Объектом управления может быть техническое устройство, технологический процесс или более простая система управления. Состояние объекта управление определяется рядом величин, характеризующих как воздействия на объект внешней среды и управляющих устройств, так и протекание процессов в нутрии объекта.Внешнее влияние на объект – воздействие. Воздействие, вырабатываемое управляющим устройством – управляющее воздействие. Воздействие, не зависящее от системы управления – возмущение. Контролируемые величины, характеризующие состояние объекта, по которым ведётся управление, называется управляемыми (регулируемыми).
При изображение системы управления (регулирования) применяются два принципа: функциональный и структурный. Функциональная схема – блок-схема системы, заданная функциональным назначением элементов. Структурная схема – блок-схема системы, заданная математическими характеристиками элементов. Билет-3 Понятие обратной связи Вопрос-4 Вопрос 5 Вопрос-6 Временные характеристики определяют вид изменения выходного сигнала при подаче на вход звена типового управляющего воздействия. Это позволяет сравнивать свойства звеньев в динамических режимах работы. Временные свойства звена определяются, его переходной и импульсной переходной характеристиками. Вопрос 7 Дифференцирующие. Позиционные звенья описываются линейными дифференциальными уравнениями не выше второго порядка. Основное свойство устойчивых позиционных звеньев: при постоянном входном сигнале входная величина с течением времени стремится к постоянному значению. Интегрирующие Идеальное интегрирующее W(p)= Интегрирующее с запаздыванием (инерционные) Дифференцирующее Идеальное дифференцирующее W(p)=kp Дифференцирующее с запаздыванием (инерционные) W(p)= Вопрос-8 Если на вход любого динамического звена подать синусоидальные колебания y = a·sin w1t с амплитудой а и частотой w, то на выходе звена установятся "вынужденные" синусоидальные колебания x = A·sin(w1 + j) с амплитудой A = k × a, частотой w1 сдвинутые по фазе на угол j. Коэффициент усиления звена k = А/а. При изменении частоты w коэффициент усиления звена и сдвиг фазы будут изменяться. Эти зависимости представляются в виде частотных характеристик:
За единицу измерения L(w) принят децибел (дБ). За единицу измерения частоты принимается декада, т.е. интервал частот, на котором частота изменяется в 10 раз: lgw [дек]. Билет-9 Вопрос-10 Тепловой объект
Пневмадинамический объект.
Механический объект
Свойства; Самовыравнивание; Емкость; Запаздывание; Способность объекта накапливать энергию или вещества наз-ся аккумулирующей способностью, а величина характеризующая аккумулирующую способность объекта называется емкостью.Запаздывание проявляется в сдвиге по времени начало переходного процесса относительно входного воздействия. Вопрос- 11. Понятие устойчивости линейных непрерывных САУ Под устойчивость САУ понимается ее способность переходить из одного установившегося состояния (режима работы) в другое установившееся состояние под воздействием какого либовнешнего сигнала и оставаться в этом новом состоянии или возвращаться в исходное состояние при снятии этого воздействия.
Понятие «устойчивость» наглядно иллюстрируется на рис. (шар и опорная поверхность)На рис а,б шар находится в равновесии. При отклонении от этого положения в любую сторону в первом случае (а) шар не может вернуться в исходное положение (неустойчивое равновесие), во втором случае (б) – возвращается (устойчивое равновесие). Если опорная поверхность представляет собой горизонтальную плоскость, то шар движется по ней до тех пор, пока действует движущая сила Fд и после ее исчезновения останавливается в любой точке на плоскости. Такая система называется нейтральной (в). Систем устойчива в малом, если констатируют лишь факт наличия области устойчивости, но не определяют каким-либо образом ее границы. Если границы устойчивости определены, т.е границы области начальных отклонений, при которых сис-ма возвращается в состояние равновесия,(г) и выяснено, что реальные начальные отклонения принадлежат этой области, то сист-ма устойчива в большом. Когда сис-ма возвращается в состояние равновесия при любых начальных отклонениях, ее называют устойчивой в целом, т.е и в малом и большом.Устойчивость САУ является необходимым условием ее работоспособности. Основоположником теории устойчивости является ученый математик А.М.Ляпунов, который в 1892 году опубликовал ряд теорем об устойчивости движения Устойчивость является одним из необходимых условий, обеспечивающих нормальное функционирование автоматических систем. Поэтому чрезвычайно важно выяснить те условия, которые обеспечивают принципиальную работоспособность системы, ее устойчивость. Признаком устойчивости САУ является существование установившегося состояния. Если отклонение выходной координаты от заданного значения (т. е. ошибка управления) не стремится к постоянной величине или к нулю, а возрастает или испытывает колебания, то САУ неустойчива. Причинами неустойчивости могут быть инерционность элементов и большой коэффициент передачи разомкнутой системы, так как многократно усиленное рассогласование, возвращающееся по цепи обратной связи на вход системы, не успевает из-за запаздывания в инерционных элементах отрабатываться.Не останавливаясь на теоремах, доказанных Ляпуновым, рассмотрим, как можно оценить устойчивость линейных систем, описываемых дифференциальным уравнением вида
Понятие устойчивости Устойчивость является одним из основных требований, предъявляемых к системам автоматического управления (САУ). Неустойчивые САУ неработоспособны, поэтому важно уметь определять и соответствующий выбор структуры и параметры системы, обеспечить её устойчивость. В системе управления требуется поддерживать некоторое заданное движение, которое называется невозмущенным движением.Вследствие различных возмущающих воздействий фактическое движение отличается от невозмущенного движения. В нормально функционирующей системе отклонение фактического движения от невозмущенного движения должно быть небольшим, а это возможно лишь в устойчивых системах. Устойчивость по входу Звено называется устойчивым по входу (осуществляющим устойчивое преобразование вход-выход), если при любом ограниченном входном воздействии x(t) и нулевых начальных условиях, выходная реакция y(t) является ограниченной при любом конечном и при и называется неустойчивым на входе в противном случае.Об устойчивости по входу можно судить по свойствам весовой функции Теорема 4.1 Для того, чтобы звено, описываемое операторным уравнением, было устойчиво по входу, необходимо и достаточно выполнение условия.Доказательство: известно, что вход и выход звена осуществляются по формуле.Пусть x(t) – произвольно правильная функция, т.е. такая, чтоГде С0 – некоторая константа. Тогда Характеристическое уравнение Устойчивость линейной системы зависит от её характеристического уравнения. Где дифференциальный параметр собственный P рассматривается, как переменная. Левая часть характеристического уравнения называется характеристическим полиномом.Характеристический полином системы совпадает с её собственным оператором или знаменателем передаточной функции. Необходимое и достаточное условие устойчивости Для того чтобы линейная непрерывная система была устойчива, необходимо и достаточно, чтобы все корни её характеристического уравнения Или другая формулировка.Для того чтобы линейная непрерывная система была устойчивой, необходимо и достаточно, чтобы все корни её характеристического уравнения были левыми, т.е. располагались в левой полуплоскости. вопрос12. Критерий устойчивости Гурвица — один из способов анализа линейной стационарной динамической системы на устойчивость, разработанный немецким математиком Адольфом Гурвицом. Наряду с критерием Рауса является представителем семейства алгебраических критериев устойчивости, в отличие от частотных критериев, таких, как критерий устойчивости Найквиста. Достоинством метода является принципиальная простота, недостатком - необходимость выполнения операции вычисления определителя, которая связана с определенными вычислительными тонкостями (например, для больших матриц может оказаться значительной вычислительная ошибка). Метод работает с коэффициентами характеристического уравнения системы. Пусть
Из коэффициентов характеристического уравнения строится определитель Гурвица 1) по главной диагонали слева направо выставляются все коэффициенты характеристического уравнения от 2) от каждого элемента диагонали вверх и вниз достраиваются столбцы определителя так, чтобы индексы убывали сверху вниз; 3) на место коэффициентов с индексами меньше нуля или больше Тогда согласно критерию Гурвица: Для того, чтобы динамическая система была устойчива, необходимо и достаточно, чтобы все Анализируя условие критерия Гурвица, можно заметить его избыточность. Число неравенств можно уменьшить в два раза, используя теорему Льенара-Шипара. Впрочем, в вычислительном отношении сложность критерия уменьшается не существенно, так как при вычислении минора высокого порядка чаще всего необходимо вычисление миноров низших порядков. Гурвица критерий, позволяющий узнать, когда все корни многочлена р (z) = a0zn + a1zn-1 +... + an-1z + an имеют отрицательные действительные части. Например, для многочленов с действительными коэффициентами a0 > 0, a 1,..., a nГ. к. гласит: чтобы все корни многочлена p (z) имели отрицательные действительные части, необходимо и достаточно, чтобы при всех k = 1, 2,..., n соблюдались неравенства:
Этот критерий был найден нем. математиком А. Гурвицем (A. Hurwitz) в 1895. Г. к. применяется главным образом для определения устойчивости решений системы линейных дифференциальных уравнений с постоянными коэффициентами (см. Устойчивость системы автоматического управления).
Вопрос-13 Необращая при этом в 0. Следствие Михайлова: Автоматическая система устойчива, если действительные и мнимые части характеристической функции F(j P(
Рис. 4.14 Передаточная функция замкнутой САУ выражается через Передаточная функция замкнутой САУ выражается через W(s): Ф Пусть
Многочлен D(s) является характеристическим многочленом замкнутой системы, а Q(s) – характеристическим многочленом разомкнутой цепи этой системы. Степени этих многочленов равны. Частотный критерий Найквиста в этом случае формулируется следующим образом: Если разомкнутая цепь САУ неустойчива и ее характеристический многочлен Q(s) имеет m корней с положительной вещественной частью, то для устойчивости замкнутой САУ необходимо и достаточно, чтобы АФЧХ разомкнутой системы W(jw) при изменении частоты w от 0 до ¥ охватывала точку (-1,j0) в положительном направлении m/2 раз. Например, если передаточная функция разомкнутой цепи имеет m=1 (один положительный полюс), то для устойчивости замкнутой системы АФЧХ разомкнутой цепи должна иметь вид, примерно как показано на рисунке 4.18,а, а в случае m=3 – как на рисунке 4.18,б. При этом начальная точка характеристики на оси абсцисс левее точки (-1,j0) считается как половина перехода.
Вопрос-15 Рисунок 12 Замкнутая САУ
Здесь W(p) – передаточная функция разомкнутой САУ. Предположим, что разомкнутая система устойчива. Тогда для устойчивости замкнутой САУ необходимо и достаточно, чтобы годограф амплитудно-фазовой характеристики W(jw) разомкнутой системы (указанная характеристика получается из W(p) заменой p=jw) не охватывал точку с координатами (-1, j0). Частота, на которой |W(jw)| = 1, называется частотой среза (wср). Для того, чтобы оценить, насколько далеко от границы устойчивости находится система, вводятся понятие запасов устойчивости. Запас устойчивости по амплитуде (модулю) указывает во сколько раз необходимо изменить длину радиуса-вектора годографа АФХ, чтобы, не меняя фазового сдвига, вывести систему на границу устойчивости. В свою очередь, запас устойчивости по фазе указывает, на сколько необходимо увеличить по абсолютной величине аргумент АФХ, чтобы, не меняя величину модуля, вывести систему на границу устойчивости. Для абсолютно устойчивых систем запас устойчивости по модулю DH вычисляется по формуле:
где частота w° определяется из соотношения arg W(jw°) = - 1800. Величина
Вопрос-16 Вопрос-17 Время переходного процесса (время регулирования) определяется как время от начало переходного процесса до момента когда отключение выходной величины становиться близко установившемся значению с заданной точностью. Ιy(x)-y( Перегулирование (σ%) σ=
1-колебательный процесс; 2-апериодический; 3-монотонный; Колебательность переходного процесса определяется числом колебаний равным числу min кривой переходного процесса (0;tпп) Вопрос 28 Вопрос 19 Непрерывного действия Прерывного (позиционные) Комбинированное Прямого Непрямого действия Регулирование непрерывного действия действуют по разным законам. В соответствии с законом они подразделяются: Пропорциональные (П) Интегральные (И) Пропорционально- дифференциальные (ПД) Пропорционально - интегрально- дифференциальные (ПИД) (П) Kp – статистический коэффициент передачи (И) U=Ku
(ПИ) U= Kp
Вопрос 20 Вопрос 21 Параллельное Последовательное Смешанное
Последовательное корректирующее устройство с передаточной функцией Wп включается обычно после предварительного усилителя. На рис.а предварительный усилитель имеет передаточную функцию W3, выходной каскад усилителя - W2, исполнительный элемент - W1. Параллельное корректирующее устройство с передаточной функцией Wпс (рис.б) может иногда при меньшей сложности обеспечить нужное преобразование сигнала. Например, для коррекции свойств САУ часто требуются дифференцирующие и форсирующие звенья, которые конструктивно очень сложны. В то же время параллельно-согласное включение предварительного усилителя (W3 = K3) и простого апериодического звена с передаточной функцией Wпс = Вопрос 22 Билет №23 Импульсные автоматические СУ имеют в своем составе звено, преобразующее управляемую величину в дискретную импульсную. При этом управляемой величине пропорциональна амплитуда или длительность импульсов. В цифровых системах формирование управляющих воздействий осуществляется цифровыми вычислительными устройствами, которые оперируют не с непрерывными сигналами, а с дискретными числовыми последовательностями. Вопрос 24 Первичные (ПИП) Вторичные (ВИП) Аналоговые Релейные Электрические Гидравлические Механические (рычаг) Структуру измерительных преобразований различают 4 вида. Структура прямого однократного преобразования xвх xвых T ТЭДС I Дифференциальная структура Хвх Хвых Устройства ввода данных Клавиатура Самым известным устройством ввода информации является клавиатура (keyboard) - это стандартное устройство, предназначенное для ручного ввода буквенно-символьной информации в ПК. Устройство Клавиатура представляет собой совокупность датчиков, воспринимающих давление на клавиши и замыкающих определенную электрическую цепь, со стандартным разъемом (PS/2, USB) и интерфейсом для подключения к системной плате компьютера. Длительное время выпускались клавиатуры с механическими датчиками. Современные клавиатуры - мембранного типа. Переключатель представляет собой набор мембран: активная - верхняя, пассивная - нижняя, разделяющая.Работой клавиатуры управляет контроллер клавиатуры, расположенный на материнской плате и подключаемый к ней через разъем на задней панели компьютера. При нажатии пользователем клавиши на клавиатуре, контроллер клавиатуры преобразует код нажатой клавиши в соответствующую последовательность битов и передает их компьютеру. Отображение символов, набранных на клавиатуре, на экране компьютера называется эхом.Внутри корпуса клавиатуры помимо датчиков расположены электронные платы дешифрации сигнала. Обмен данными между клавиатурой и системной платой осуществляется 11-битовыми блоками (8 разрядов плюс служебная информация) по 2-проводному кабелю (сигнал и земля). Клавиатура содержит внутренний контроллер, позволяющий производить самотестирование в момент подключения (одновременная индикация светодиодов «NumLock», «CapsLock», «ScrollLock»), управляющий индикаторами и обеспечивающий связь с системной платой ПК посредством последовательного интерфейса Принцип работы Принцип работы клавиатуры заключается в сканировании переключателей клавиш. Замыканию и размыканию любого из переключателей соответствует уникальный цифровой код (scan code) размером 1 байт. На системной плате прием и обработку сигналов от клавиатуры выполняет специальная микросхема - контроллер клавиатуры.Внутренний микропроцессор клавиатуры обрабатывает специальный сигнал, поступающий к нему после нажатия любой клавиши и, преобразуя его, последовательно передает центральному процессору сканируемый код. Каждое нажатие клавиши формирует два кода: один по нажатию, другой - по освобождению клавиши.Компьютер получает эти коды через специальный порт ввода-вывода. Когда сигналы кода достигают центрального блока, контроллер клавиатуры объявляет микропроцессору, что коды доступны, чтобы он мог обработать прерывания. Когда это случается, центральный блок обрабатывает полученные сигналы и определяет какие клавиши нажаты и в какой комбинации. Программы, реализующие данную функцию, являются частью BIOS. Компьютер запоминает состояние нажатых клавиш путем изменения специальных областей памяти.Клавиатура в своей собственной специальной памяти запоминает, какая клавиша была нажата (обычно в памяти клавиатуры может храниться до 20 кодов нажатых клавиш, если процессор не успевает ответить на прерывание). После передачи кода нажатой клавиши процессору эта информация из памяти клавиатуры исчезает.Кроме нажатия клавиатура отмечает также и отпускание каждой клавиши, посылая процессору свой сигнал прерывания с соответствующим кодом. Таким образом, компьютер «знает», держат клавишу или она уже отпущена. Это свойство используется при переходе на другой регистр. Кроме того, если клавиша нажата дольше определенного времени, обычно около половины секунды, то клавиатура генерирует повторные коды нажатия этой клавиши.Ввод символов с клавиатуры осуществляется только в той точке экрана, где располагается курсор. 29. Элементы сравнения – они сопоставляют задающее воздействие x(t) и управляемую величину y(t). Получаемая на выходе таких элементов разность (t)=x(t)-y(t) передается по цепи воздействия, либо непосредственно на исполнительный механизм. Элементы сравнения, как самостоятельная часть системы не применяется, а является составной частью других устройств, например, автоматических регуляторов (эл. мостовые схемы сравнения, потенциометры, пружинные элементы и др.) устройство в автоматике, вычислительной технике и др., на выходе которого сигнал появляется только тогда, когда воздействие входного сигнала превышает некоторый уровень, называемый порогом срабатывания. Предназначен для сравнения значений величин. Элемент сравнения (ЭС) обеспечивает сравнение заданного значения регулируемой величины, полученного от задатчика, с измеренным значением, поступающим от датчика, и вырабатывает на основе этого сравнения сигнал ошибки DХ. При этом сигнал ошибки может быть получен в виде, неудобном для работы последующих цепей. Например, сигнал может быть получен в виде изменения напряжения постоянного тока, усиление которого связано с большими трудностями. Поэтому постоянный ток желательно преобразовать в переменный. Далее, мощность сигналов ошибки, получаемых от элементов сравнения, в большинстве случаев недостаточна для работы последующих элементов систем регулирования. Все это вызывает необходимость применения дополнительных преобразовательных (ПЭ) и усилительных элементов (УЭ). Исполнительные элементы (механизмы) (ИМ) служат для создания регулирующего воздействия на объект. Исполнительный механизм часто называется также серводвигателем, или сервомотором. Вопрос 30 Усилитель Регулятор Кус= Классификация по виду используемой энергии: Механические Электрические Гидравлические Пневматически Билет № 31 Исполнительные механизмы Устройство, преобразующее управляющий сигнал регулятора в перемещение РО, называют исполнительным механизмом. Такое устройство обычно состоит из исполнительного двигателя, передаточного или преобразующего узла (например, редуктора), а также систем защиты, контроля и сигнализации положения выходного элемента, блокировки и отключения. Передаточная функция ИМ входит в ПФ регулятора, и потому ИМ должен обладать достаточным быстродействием и точностью, с тем чтобы осуществлять перемещение РО с возможно меньшим искажением закона регулирования. Наиболее характерна классификация ИМ по виду потребляемой энергии на гидравлические, пневматические и электродвигательные. Электромагнитные ИМ. Они представляют собой соленоиды и электромагнитные муфты. Соленоидный ИМ — это катушка, втягивающее усилие которой при подаче управляющего сигнала 13 перемещает якорь на расстояние 5, преодолевая сопротивление пружины. Статическая характеристика электромагнитных ИМ, как правило, нелинейная, и их используют в системах позиционного регулирования. Электромагнитные муфты могут быть фрикционными, порошковыми или асинхронными. Фрикционная муфта состоит из двух полумуфт, посаженных на ведущий и ведомый валы. В одной из полумуфт расположена обмотка возбуждения. При подаче на нее напряжения полумуфты сдвигаются и возникающая сила трения приводит их в движение. Такие муфты также применяют в системах позиционного регулирования и защиты оборудования при аварийных нарушениях его работы. Принцип действия порошковой муфты основан на изменении вязкости ферромагнитной массы, заполняющей муфту. При подаче на катушку напряжения вязкость ферромагнитной массы возрастает и передаваемый момент увеличивается. Билет № 32 Билет № 33 Билет № 33 Билет № 34 Автоматическое управление направлением движения МСА позволяет повысить эффективность и качество выполнения ТП, улучшить условия работы оператора. Устройства для автоматического направления движения (вождения) тракторов разрабатывают с момента их создания Работа МСА включает три основных этапа: выезд в поле и возвращение в хозяйство, движение по рабочей длине гона (поля), повороты в конце гона. Наибольшие затраты времени и объем выполняемых работ определяются нахождением МСА на поле (гоне), поэтому рассмотрим основные методы управления направлением МСА по рабочей длине гона. К таким методам можно отнести: копирование, программное вождение, дистанционное управление, естественное и искусственное ориентирование. Методы, использующие естественные и искусственные ориентиры, наиболее эффективны при строго заданных маршрутах движения. Последние вокруг провода создают электромагнитное поле, воспринимаемое специальными датчик
|
|||||||||||||||
|
|
Последнее изменение этой страницы: 2016-04-07; просмотров: 406; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 13.58.203.104 (0.011 с.) |



 k (w) - амплитудная частотная характеристика (АЧХ);
k (w) - амплитудная частотная характеристика (АЧХ);




 Решение этого уравнения содержит две составляющие, одна из которых,
Решение этого уравнения содержит две составляющие, одна из которых,  (свободная или переходная составляющая), определяется решением однородного дифференциального уравнения:
(свободная или переходная составляющая), определяется решением однородного дифференциального уравнения:
 — передаточная функция системы, а
— передаточная функция системы, а  — характеристическое уравнение системы. Представим характеристический полином
— характеристическое уравнение системы. Представим характеристический полином  в виде
в виде
 по алгоритму:
по алгоритму: до
до  ;
; ставятся нули.
ставятся нули.
 обращяется в 0 (ноль) по очереди т.е. корни уравнений P(
обращяется в 0 (ноль) по очереди т.е. корни уравнений P(  . jQ(
. jQ(  jQ(
jQ( 
 , где M(s) и Q(s) многочлены от S, причем степень многочлена M(s) - m меньше степени многочлена Q(s) - n. Тогда
, где M(s) и Q(s) многочлены от S, причем степень многочлена M(s) - m меньше степени многочлена Q(s) - n. Тогда

 а) Если в системе имеются местные обратные связи, то необходимо убедится в том, что по цепи местной обратной связи не нарушается устойчивость при разомкнутой главной обратной связи. Проверка устойчивости по цепи местной обратной связи может быть выполнена посредствам использования любых критериев устойчивости. Хотя теоретически вся система в замкнутом состоянии может быть устойчивой при наличии неустойчивости по цепи местной обратной связи, практически такой случай надо избегать, стремясь использовать только устойчивыеместные обратные связи. В некоторых режимах работы при имеющихся в САУ нелинейностях в этом случае могут появиться автоколебания или произойдет потеряустойчивости
а) Если в системе имеются местные обратные связи, то необходимо убедится в том, что по цепи местной обратной связи не нарушается устойчивость при разомкнутой главной обратной связи. Проверка устойчивости по цепи местной обратной связи может быть выполнена посредствам использования любых критериев устойчивости. Хотя теоретически вся система в замкнутом состоянии может быть устойчивой при наличии неустойчивости по цепи местной обратной связи, практически такой случай надо избегать, стремясь использовать только устойчивыеместные обратные связи. В некоторых режимах работы при имеющихся в САУ нелинейностях в этом случае могут появиться автоколебания или произойдет потеряустойчивости


 = 180° + arg W(jwср) определяет запас устойчивости по фазе. Из критерия Найквиста следует, что устойчивая в разомкнутом состоянии система будет устойчивой и в замкнутом состоянии, если сдвиг по фазе на частоте среза не достигает – 1800. Выполнение этого условия можно проверить, построив логарифмические частотные характеристики разомкнутой САУ. При этом достаточно просто определяются также запасы устойчивости DН и
= 180° + arg W(jwср) определяет запас устойчивости по фазе. Из критерия Найквиста следует, что устойчивая в разомкнутом состоянии система будет устойчивой и в замкнутом состоянии, если сдвиг по фазе на частоте среза не достигает – 1800. Выполнение этого условия можно проверить, построив логарифмические частотные характеристики разомкнутой САУ. При этом достаточно просто определяются также запасы устойчивости DН и  , как показано на рисунке 13.
, как показано на рисунке 13.
 )Ι≤δ t≥tnn
)Ι≤δ t≥tnn
 *100%
*100%

 ; U= Kp*
; U= Kp* 

 U- управляющее воздействие
U- управляющее воздействие
 (ПД)) U= Kp
(ПД)) U= Kp  Kd
Kd  (ПИД) U= Kp
(ПИД) U= Kp 
 позволяет реализовать функцию реального форсирующего звена. Такое соединение можно заменить эквивалентным форсирующим звеном с передаточной функцией
позволяет реализовать функцию реального форсирующего звена. Такое соединение можно заменить эквивалентным форсирующим звеном с передаточной функцией = 104
= 104  1012
1012


