
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Структура СУБД и назначение основных компонентов.Содержание книги
Похожие статьи вашей тематики
Поиск на нашем сайте
База данных – организованная совокупность данных, состоящая из связанных между собой данных об объектах некоторой предметной области, их свойствах и характеристиках. База знаний – организованная совокупность знаний, относящихся к какой-нибудь предметной области, представленная определенной структурой. Данные - информация фактического характера, описывающая объекты, процессы и явления предметной области, а также их свойства. Знания описывают не только отдельные факты, но и взаимосвязи между ними. В компьютере знания должны быть представлены определенными структурами данных, соответствующими среде разработки интеллектуальной информационной системе. По своей природе знания делятся на декларативные и процедурные. Декларативные знания представляют собой описания фактов и явлений, фиксируют наличие или отсутствие таких фактов, также включают описания основных связей и закономерностей, в которые эти факты и явления входят. Процедурные знания – это описания действий, которые возможны при манипулировании фактами и явлениями для достижения намеченных целей. Система управления базами данных (СУБД) - программное средство, предназначенное для организации и ведения логически взаимосвязанных данных на внешнем носителе, а также обеспечивающее доступ к данным. Интеллектуальная информационная система основана на концепции использования баз знаний для генерации алгоритмов решения прикладных задач различных классов в зависимости от конкретных информационных потребностей пользователей. К функциям СУБД относят следующие (к лекции по СУБД): ü управление данными непосредственно в БД – функция, обеспечивающая хранение данных, непосредственно входящих в БД и служебной информации, обеспечивающей работу СУБД; ü управление данными в памяти компьютера – функция, связанная в первую очередь с тем, что СУБД работают с БД большого размера. В целях ускорения работы СУБД используется буферизация данных в оперативной памяти компьютера. При этом пользователь получает только необходимую для его конкретной задачи часть БД, а при необходимости получает новую «порцию» данных; управление транзакциями – функция СУБД, которая производит ряд операций над БД, как единым целым. Транзакция – это последовательность операций над БД, рассматриваемых СУБД как единое целое. Транзакция переводит БД из одного целостного состояния в другое. ü управление изменениями в БД и протоколирование – функция, связанная с надежностью хранения данных, то есть возможностью СУБД восстанавливать состояние БД в аварийных ситуациях, например, при случайном выключении питания или сбое носителя информации. Для восстановления БД нужно располагать дополнительной информацией, по которой осуществляется восстановление. С этой целью ведется протокол изменений БД, в которой перед манипуляциями с данными делается соответствующая запись. Для восстановления БД после сбоя СУБД используется протокол и архивная копия БД – полная копия БД к моменту начала заполнения протокола. ü поддержка языков БД - для работы с БД используется специальные языки, в целом называемые языками баз данных. В СУБД обычно поддерживается единый язык, содержащий все необходимые средства – от создания БД до обеспечения пользовательского интерфейса при работе с данными. Наиболее распространенным в настоящее время языком СУБД является язык SQL (Structured Query Language). Компоненты субд • Процессор запросов. Это основной компонент СУБД, который преобразует запросы в последовательность низкоуровневых инструкции для контроллера базы данных. Более полно функции этого компонента рассматриваются в главе 18, "Обработка запросов".
• Контроллер файлов манипулирует предназначенными для хранения данных файлами и отвечает за распределение доступного дискового пространства. Он создает и поддерживает список Рис. 2.6. Осн-ые компоненты сис-мы упр-ия базами данных структур и индексов, определенных во внутренней схеме. Если используются хешированные файлы, то в его обязанности входит и вызов функций хеширования для генерации адресов записей. Однако контроллер файлов не управляет физическим вводом и выводом данных непосредственно, а лишь передает запросы соответствующим методам доступа, которые считывают данные в системные буферы или записывают их оттуда на диск.
Компилятор языка DDL. Компилятор языка DDL преобразует DDL-команды в набор таблиц, содержащих метаданные. Затем эти таблицы сохраняются в системном каталоге, а управляющая информация — в заголовках файлов с данными. Контроллер словаря. Контроллер словаря управляет доступом к системному каталогу и обеспечивает работу с ним. Системный каталог доступен большинству компонентов СУБД. Рис. 2.7. Компоненты контроллера базы данных Ниже перечислены основные программные компоненты, входящие в состав контроллера базы данных. • Контроль прав доступа. Этот модуль проверяет наличие у данного пользователя полномочий для выполнения затребованной операции. • Процессор команд. После проверки полномочий пользователя для выполнения затребованной операции управление передается процессору команд. • Средства контроля целостности. В случае операций, которые изменяют содержимое базы данных, средства контроля целостности выполняют проверку того, удовлетворяет ли затребованная операция всем установленным ограничениям поддержки целостности данных (например, требованиям,установленным для ключей). Ш Оптимизатор запросов. Этот модуль определяет оптимальную стратегию выполнения запроса. Более подробно оптимизация запросов рассматривается в главе 18, "Обработка запросов". • Контроллер транзакций. Этот модуль осуществляет требуемую обработку операций, поступающих в процессе выполнения транзакций. • Планировщик. Этот модуль отвечает за бесконфликтное выполнение параллельных операций с базой данных. Он управляет относительным порядком выполнения операций, затребованных в отдельных транзакциях. • Контроллер восстановления. Этот модуль гарантирует восстановление базы данных до непротиворечивого состояния при возникновении сбоев. В частности, он отвечает за фиксацию и отмену результатов выполнения • Контроллер буферов. Этот модуль отвечает за перенос данных между оперативной памятью и вторичным запоминающим устройством — например, жестким диском или магнитной лентой. Контроллер восстановления и контроллер буферов иногда (в совокупности) называют контроллером данных. Последних четыре модуля подробно обсуждаются в главе 17, "Управление транзакциями". Для воплощения базы данных на физическом уровне помимо перечисленных выше модулей нужны некоторые другие структуры данных. К ним относятся файлы данных и индексов, а также системный каталог. Группой DAFTG (Database Architecture Framework Task Group)была предпринята попытка стандартизации СУБД, и в 1986 году ею была предложена некоторая эталонная модель. Назначение эталонной модели заключается в определении концептуальных рамок для разделения предпринимаемых попыток стандартизации на более управляемые части и указания взаимосвязей между ними на очень широком уровне.
43. Статические характеристики нелинейных элементов. Большинство характеристик реальных устройств в общем случае являются нелинейными и некоторые из них не могут быть линеаризованы, т.к. имеют разрывы второго рода и к ним кусочно-линейная аппроксимация неприменима. Работу реальных звеньев (устройств) могут сопровождать такие явления, как насыщение, гистерезис, люфт, наличие зоны нечувствительности и т.д. Нелинейности могут быть естественными и искусственными (преднамеренно вводимые). Естественные нелинейности присущи системам в силу нелинейного проявления физических процессов и свойств у отдельных устройств. Например, механическая характеристика асинхронного двигателя. Искусственные нелинейности вводятся разработчиками в системы, чтобы обеспечить требуемое качество работы: для оптимальных по быстродействию систем применяют релейное управление, наличие нелинейных законов в поисковых и без поисковых экстремальных системах, системы с переменной структурой и т.д.
Рис.7.2. Статические характеристики нелинейных элементов Поведение нелинейных систем при наличии существенных нелинейностей имеет ряд особенностей, отличных от поведения линейных САУ [2,6,13]: 1. выходная величина нелинейной системы непропорциональна входному воздействию, т.е. параметры нелинейных звеньев зависят от величины входного воздействия;
3. для нелинейных систем характерен режим незатухающих периодических колебаний с постоянной амплитудой и частотой (автоколебаний), возникающий в системах при отсутствии периодических внешних воздействий; Основными параметрами, характеризующими работу нелинейных САУ, являются:
|
||||
|
|
Последнее изменение этой страницы: 2017-02-21; просмотров: 538; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 13.58.232.94 (0.008 с.) |

 • Контроллер базы данных. Этот компонент взаимодействует с запущенны
• Контроллер базы данных. Этот компонент взаимодействует с запущенны • Препроцессор языка DML. Этот модуль преобразует внедренные в прикладные программы DML-операторы в вызовы стандартных функций базового языка. Для генерации соответствующего кода препроцессор языка
• Препроцессор языка DML. Этот модуль преобразует внедренные в прикладные программы DML-операторы в вызовы стандартных функций базового языка. Для генерации соответствующего кода препроцессор языка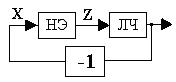 Рис. 7.1. Функциональная схема нелинейной системы:
Рис. 7.1. Функциональная схема нелинейной системы: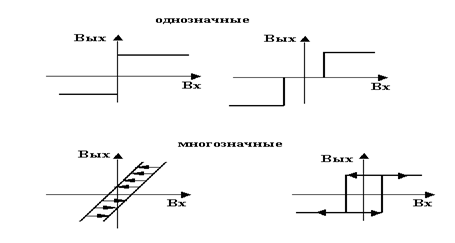 Классификация нелинейных звеньев возможна по различным признакам. Наибольшее распространение получила классификация по статическим и динамическим характеристикам. Первые представляются в виде нелинейных статических характеристик, а вторые - в виде нелинейных дифференциальных уравнений. Примеры таких характеристик приведены в [2,6]. На рис.7.2. приведены примеры однозначных (без памяти) и многозначных (с памятью) нелинейных характеристик. В этом случае учитывается направление (знак) скорости сигнала на входе.
Классификация нелинейных звеньев возможна по различным признакам. Наибольшее распространение получила классификация по статическим и динамическим характеристикам. Первые представляются в виде нелинейных статических характеристик, а вторые - в виде нелинейных дифференциальных уравнений. Примеры таких характеристик приведены в [2,6]. На рис.7.2. приведены примеры однозначных (без памяти) и многозначных (с памятью) нелинейных характеристик. В этом случае учитывается направление (знак) скорости сигнала на входе. Рис.7.3. Фазовые траектории нелинейных систем
Рис.7.3. Фазовые траектории нелинейных систем


