
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Общая структура современных асу ТПСодержание книги
Поиск на нашем сайте
Нижний уровень - уровень объекта (контроллерный) – включает различные датчики для сбора информации о ходе технологического процесса, электроприводы и исполнительные механизмы для реализации регулирующих и управляющих воздействий. Датчики поставляют информацию локальным программируемым логическим контроллерам (PLC - Programming Logical Controoller), которые могут выполнять следующие функции: - сбор и обработка информации о параметрах технологического процесса; - управление электроприводами и другими исполнительными механизмами; - решение задач автоматического логического управления и др.
Так как информация в контроллерах предварительно обрабатывается и частично используется на месте, существенно снижаются требования к пропускной способности каналов связи. В качестве локальных PLC в системах контроля и управления различными технологическими процессами в настоящее время применяются контроллеры как отечественных производителей, так и зарубежных. На рынке представлены многие десятки и даже сотни типов контроллеров, способных обрабатывать от нескольких переменных до нескольких сот переменных. К аппаратно-программным средствам контроллерного уровня управления предъявляются жесткие требования по надежности, времени реакции на исполнительные устройства, датчики и т.д. Программируемые логические контроллеры должны гарантированно откликаться на внешние события, поступающие от объекта, за время, определенное для каждого события. Для критичных с этой точки зрения объектов рекомендуется использовать контроллеры с операционными системами реального времени (ОСРВ). Контроллеры под управлением ОСРВ функционируют в режиме жесткого реального времени. Разработка, отладка и исполнение программ управления локальными контроллерами осуществляется с помощью специализированн Рис. 18. Общий формат кадра ого программного обеспечения, широко представленного на рынке. К этому классу инструментального ПО относятся пакеты типа ISaGRAF (CJ International France), InConrol (Wonderware, USA), Paradym 31 (Intellution, USA). Информация с локальных контроллеров может направляться в сеть диспетчерского пункта непосредственно, а также через контроллеры верхнего уровня (см. рис.). В зависимости от поставленной задачи контроллеры верхнего уровня (концентраторы, интеллектуальные или коммуникационные контроллеры) реализуют различные функции. Некоторые из них перечислены ниже: - сбор данных с локальных контроллеров; - обработка данных, включая масштабирование; - поддержание единого времени в системе; - синхронизация работы подсистем; - организация архивов по выбранным параметрам; - обмен информацией между локальными контроллерами и верхним уровнем; - работа в автономном режиме при нарушениях связи с верхним уровнем; - резервирование каналов передачи данных и др. Рассматривая обобщенную структуру систем управления, следует ввести и еще одно понятие - Micro-SCADA. Micro-SCADA - это системы, реализующие стандартные (базовые) функции, присущие SCADA - системам верхнего уровня, но ориентированные на решение задач автоматизации в определенной отрасли (узкоспециализированные). В противоположность им SCADA - системы верхнего уровня являются универсальными. Верхний уровень - диспетчерский пункт (ДП) - включает, прежде всего, одну или несколько станций управления, представляющих собой автоматизированное рабочее место (АРМ) диспетчера/оператора. Здесь же может быть размещен сервер базы данных, рабочие места (компьютеры) для специалистов и т. д. Часто в качестве рабочих станций используются ПЭВМ типа IBM PC различных конфигураций. Станции управления предназначены для отображения хода технологического процесса и оперативного управления. Эти задачи и призваны решать SCADA - системы. SCADА - это специализированное программное обеспечение, ориентированное на обеспечение интерфейса между диспетчером и системой управления, а также коммуникацию с внешним миром. SCADA является основным и в настоящее время остается наиболее перспективным методом автоматизированного управления сложными динамическими системами в жизненно важных и критичных с точки зрения безопасности и надежности областях. Именно на принципах диспетчерского управления строятся крупные автоматизированные системы в промышленности и энергетике, на транспорте, в космической и военной областях, в различных государственных структурах. Интерес к высоконадежным системам диспетчерского управления и сбора данных связан с одной стороны со значительным прогрессом в области вычислительной техники, программного обеспечения и телекоммуникаций, что увеличивает возможности и расширяет сферу применения автоматизированных систем. С другой стороны, развитие информационных технологий, повышение степени автоматизации и перераспределение функций между человеком и аппаратурой обострило проблему взаимодействия человека-оператора с системой управления. Расследование и анализ большинства аварий и происшествий в авиации, наземном и водном транспорте, промышленности и энергетике, часть из которых привела к катастрофическим последствиям, показали, что, если в 60-х годах ошибка человека являлась первоначальной причиной лишь 20% инцидентов (80%, соответственно, за технологическими неисправностями и отказами), то в 90-х годах доля человеческого фактора возросла до 80%, причем, в связи с постоянным совершенствованием технологий и повышением надежности электронного оборудования и машин, доля эта может еще возрасти.
Общая современная структура АСУ ТП: Рис.1.2.Типовая функциональная схема современной АСУ ТП.
Обозначения: (датчики), ИМ - исполнительные механизмы, ПЛК - программируемый логический контроллер, ПрК - программируемый (настраиваемый) контроллер, ИнП - интеллектуальные измерительные преобразователи, ИнИМ - интеллектуальные исполнительные устройства, Модем - модулятор/демодулятор сигналов, ИО - информационное обеспечение (базы данных), ПО - программное обеспечение, КО - коммуникационное обеспечение (последовательный порт и ПО). ПОпл - программное обеспечение пользователя, 1. 1-уровневой (локальная система), содержащей программируемый логический контроллер (ПЛК), или моноблочный настраиваемый контроллер (МНК) обеспечивающие индикацию и сигнализацию состояния контролируемого или регулируемого ТП на передней панели, 2. 2-уровневой (централизованная система), включающих: 1. на нижнем уровне несколько ПЛК с подключенными к ним датчиками и исполнительными устройствами, 2. на верхнем уровне – одна (возможно несколько) операторских (рабочих) станций (автоматизированных рабочих мест (АРМ) оператора). Обычно рабочая станция или АРМ - это ЭВМ в специальном промышленном исполнении, со специальным программным обеспечением, – системой сбора и визуализации данных (SCADA-системы).
|
||||
|
|
Последнее изменение этой страницы: 2017-02-21; просмотров: 590; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 13.58.221.124 (0.006 с.) |

 Многие проекты автоматизированных систем контроля и управления для большого спектра областей применения позволяют выделить обобщенную схему их реализации, представленную на рис.1. Как правило, это двухуровневые системы, так как именно на этих уровнях реализуется непосредственное управление технологическими процессами.
Многие проекты автоматизированных систем контроля и управления для большого спектра областей применения позволяют выделить обобщенную схему их реализации, представленную на рис.1. Как правило, это двухуровневые системы, так как именно на этих уровнях реализуется непосредственное управление технологическими процессами.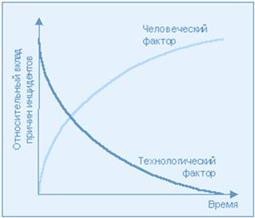 Другой вариант ответа. При построении средств современной промышленной автоматики (обычно в виде АСУ ТП) используется иерархическая информационная структура с применением на разных уровнях вычислительных средств различной мощности.
Другой вариант ответа. При построении средств современной промышленной автоматики (обычно в виде АСУ ТП) используется иерархическая информационная структура с применением на разных уровнях вычислительных средств различной мощности.



