
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Алгебраический критерий устойчивости Гурвица.Содержание книги
Поиск на нашем сайте
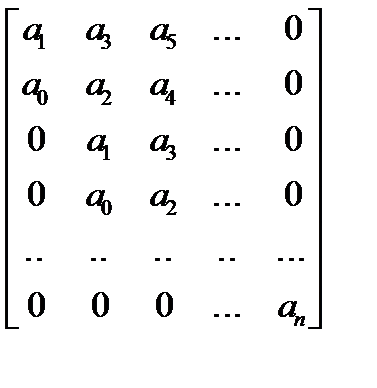
Алгебраический критерий устойчивости Гурвица применяется для замкнутых систем. Однако, как правило, известна W(s) разомкнутой САУ. В этом случая надо ”мысленно” замкнуть систему единичной обратной отрицательной связью (ООС), найти передаточную функцию замкнутой системы по формуле Wз(s)= и записать характеристическое уравнение системы Q2(s)=0, т.е. a0sn+ a1sn-1+...+ an-1s+ an=0. Формулировка критерия устойчивости Гурвица: для устойчивости замкнутой САУ необходимо и достаточно, чтобы при a0>0 все миноры, расположенные по главной диагонали определителя Гурвица, были строго положительны. Определитель Гурвица строится по коэффициентам характеристического уравнения следующим образом: D(n*n)= где n-порядок системы. Из формулировки критерия устойчивости Гурвица следует, что при а0>0 для устойчивости системы необходимо и достаточно, чтобы D1=a1>0 D2= D3= Различают три типа границы устойчивости системы из условия Dn=anDn-1=0
Это следующие границы: 1)первый тип границы устойчивости, который называется апериодической границей устойчивости an=0; 2) второй тип границы устойчивости, который называется колебательной границей устойчивости Dn-1=0; 3) третий тип границы устойчивости называется бесконечной a0=0, когда один из корней характеристического уравнения равен бесконечности, т.е. sj=¥ Следует отметить, что наиболее опасной является нахождение системы на колебательной границы устойчивости. П-регулятор. П – регуляторы. П-регулятор. И – регулятором называется такой регулятор, у которого скорость перемещения РО пропорционально отклонению регулируемого параметра от заданного значения. Передаточная функция И – регулятора
где У И – регулятора нет жесткой зависимости между отклонением регулируемой величины и положением РО. В момент прекращения работы АР регулирующий орган может занимать любое положение в пределах возможного диапазона перемещений. Основное достоинства И – регуляторов отсутствие остаточного отклонения регулируемой величины по окончании процесса регулирования. Это объясняется тем, что регулирующее воздействие регулятора на объект прекращается в тот момент, когда отклонение регулируемой величины от заданного значения становится равным нулю. Недостатком И – регулятора является относительно низкая скорость, которая характеризуется значением параметра настройки регулятора
Билет №4-29 1.Преобразование Лапласа.
|
|||||
|
|
Последнее изменение этой страницы: 2017-02-17; просмотров: 148; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 13.58.172.97 (0.005 с.) |


 >0
>0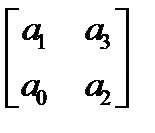 >0
>0 и т.д.
и т.д. или
или  (12.3)
(12.3) (12.4)
(12.4) = 1/Ти параметры настройки И – регулятора, Ти - постоянная интегрирования
= 1/Ти параметры настройки И – регулятора, Ти - постоянная интегрирования . Чем больше
. Чем больше 


