
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Идеальное апериодическое звено 1-го порядка.
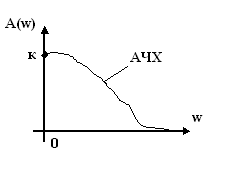
Уравнение звена Передаточная функция звена Переходная функция звена Переходная характеристика (рис. 6.2а) изменяется по экспоненциальному закону. Выходная величина звена достигает своего установившегося значения не сразу, а постепенно, через t=(3÷4)T. В этом проявляется инерционность звена. Поэтому это звено иногда называют инерцио А) Импульсная переходная функция Частотные характеристики КПФ звена определяется выражением АФЧХ звена в комплексной плоскости представляется полуокружностью с диаметром, равной передаточному коэффициенту звено К. Центр окружности лежит в точке (К/2, 0). Модуль КПФ т.е с увеличением частоты амплитуда выходного сигнала убивает
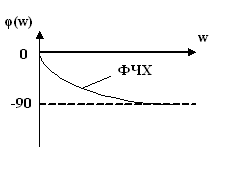
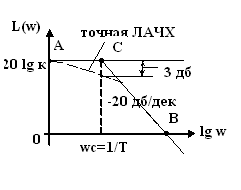
Рисунок 9.3 АЧХ и ФЧХ звена Аргумент КПФ С увеличением частоты сдвиг фаз между входными и выходными колебаниями увеличивается, достигая в пределе к –90°. Выражения ЛАЧХ звена Для области низких (ω«1/T) и высоких (ω»1/T) частот выражения для L(ω) может быть упрощено L (ω) = 20 lg к, при ω<<1/T L (ω) = 20 lg к – 20 lg ω*Т, при ω>>1/T ЛАЧХ звена в области низких частот представляет прямую АС, параллельное оси частот (асимтота точкой ЛАЧХ в области низких частот) ЛАЧХ в области высоких частот представляет прямую СВ с наклоном – 20 дб/дек (асимтота точкой ЛАЧХ в области высоких частот). Пересечение асимтот происходит при частоте ωс=1/Т и называется частотой сопряжения (рис. 9.4 а). ЛФЧХ звена при увеличении частоты по абсолютной величине увеличивается и стремится к – 90°. (рис. 6.4 б) а) Рисунок 9.4 а)–ЛАЧХ и б) – ЛФЧХ звена
3 .Принцип регулирования по отклонению.(Принцип обратной связи) АСР по отклонению работает по замкнутому циклу, т.е. имеет обратную связь.
Управляющее воздействие U(t) формируется как функция от отклонения регулируемой величины y(t) от ее предписанного значения x(t): U(t)=F [ E(t) ], где E(t)=x(t) - y(t) y(t) – текущее значение регулируемой величины. x(t) - предписанное значение регулируемой величины (заданное воздействие) Достоинство: Информация о регулируемом параметре поступает на вход АР через ОС и учитывается при формировании управленческого воздействия.
Недостаток: 1. Имеет ошибку регулирования при переходном процессе. 2. Имеет свойство к неустойчивости и склонности к колебаниям при работе системы с большим коэффициентом передачи.
Экзаменационный билет № 22-47 Принцип действия обратной связи. Положительная обратная связь. Сущность принципа Понселе. И – регуляторы. 1. Обратная связь — связь, позволяющая осуществить выбор управляющего воздействия в зависимости от состояния системы (рис. 2.3).
Принцип обратной связи есть принцип коррекции входных воздействий в процессе управления на основе информации о выходе управляемой системы, которая вместе с регулятором, корректирующим входные воздействия на основе использования информации о выходе, образует замкнутый контур под названием контур обратной связи. Принцип обратной связи - это универсальный принцип управления, позволяющий в изменяющейся среде достигать заданной цели. В зависимости от характера самой цели выделяют положительные и отрицательные обратные связи. Положи́тельная обра́тная связь (ПОС) — тип обратной связи, при котором изменение выходного сигнала системы приводит к такому изменению входного сигнала, которое способствует дальнейшему отклонению выходного сигнала от первоначального значения.Положительная обратная связь ускоряет реакцию системы на изменение входного сигнала, поэтому её используют в ситуациях, когда требуется быстрая реакция в ответ на изменение внешних параметров. В то же время положительная обратная связь приводит к неустойчивости и возникновению качественно новых (автоколебательных) систем, называемых генераторы (производители).
2. Сущность принципа Понселе заключается в том, что возмущение измеряется и формируется управляющее воздействие по каналу возмущения на объект так, чтобы скомпенсировать влияние возмущения на регулируемую координату. Регулирующий орган управляется только в функции внешних воздействий F(р) и R(р). Фактическое изменение регулируемой функции у на работу регулятора влиять не будет, т.е. управление осуществляется по разомкнутому циклу.
И-регуляторы. И – регулятором называется такой регулятор, у которого скорость перемещения РО пропорционально отклонению регулируемого параметра от заданного значения. Передаточная функция И – регулятора
где У И – регулятора нет жесткой зависимости между отклонением регулируемой величины и положением РО. В момент прекращения работы АР регулирующий орган может занимать любое положение в пределах возможного диапазона перемещений. Основное достоинства И – регуляторов отсутствие остаточного отклонения регулируемой величины по окончании процесса регулирования. Это объясняется тем, что регулирующее воздействие регулятора на объект прекращается в тот момент, когда отклонение регулируемой величины от заданного значения становится равным нулю. Недостатком И – регулятора является относительно низкая скорость, которая характеризуется значением параметра настройки регулятора
|
||||||
|
|
Последнее изменение этой страницы: 2017-02-17; просмотров: 184; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.147.73.35 (0.01 с.) |
 , где Т – постоянная времени (характеризует инерционность звена).
, где Т – постоянная времени (характеризует инерционность звена).
 б)
б)  Рисунок 9.2 а) Переходная характеристика, б) импульсно переходная характеристика
Рисунок 9.2 а) Переходная характеристика, б) импульсно переходная характеристика , т.е. убывает по экспоненциальному закону (рис. 6.2б)
, т.е. убывает по экспоненциальному закону (рис. 6.2б)
 ,
,
 .
. ;
; б)
б) 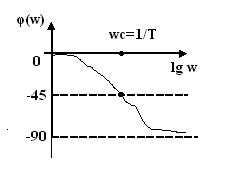

 Элемент А связан каналами прямой и обратной связи с элементом В. По каналу обратной связи элемент А получает информацию об изменениях, происходящих в элементе В в результате влияния полученной от А информации. Таким образом, с помощью обратной связи получают сведения о результатах управляющих и внешних возмущениях на объект, при этом обеспечиваются необходимые воздействия входных и выходных сигналов.
Элемент А связан каналами прямой и обратной связи с элементом В. По каналу обратной связи элемент А получает информацию об изменениях, происходящих в элементе В в результате влияния полученной от А информации. Таким образом, с помощью обратной связи получают сведения о результатах управляющих и внешних возмущениях на объект, при этом обеспечиваются необходимые воздействия входных и выходных сигналов. Y(p)=Yr(p)+Yf(p)=Wp(p)Wor(p)R(p)+[Wkf(p)Wp(p)Wor(p)-Wof(p)]F(p); при выполнении условия Wp(p)Wor(p)=1 и Wkf(p)Wp(p)Wor(p) -Wof(p)=0, Y(p)=R(p). Структура автоматической системы принципиально позволяет получить управление без ошибок. Однако практическая реализация такой системы наталкивается на затруднения. Достоинства: Возможна полная компенсация действия возмущения. Компенсирующее устройство не влияет на устойчивость. Простота регулятора. Недостатки: Необходимо сравнительно точно измерять возмущающие воздействия, что не всегда может быть выполнено, так как возмущающие силы обычно не поддаются точному измерению. Реализация регулятора в общем случае невозможна, так как в передаточной функции Wp(p)=1/Wor(p) порядок числителя, как правило, выше порядка знаменателя. Регулирование по возмущению может быть использовано лишь для объектов устойчивых. Компенсируется только измеренное возмущение. Приборы для измерения возмущений сложные и дорогие. Такие системы применяются в тех случаях, когда не требуется высокая точность выполнения алгоритма функционирования объекта.
Y(p)=Yr(p)+Yf(p)=Wp(p)Wor(p)R(p)+[Wkf(p)Wp(p)Wor(p)-Wof(p)]F(p); при выполнении условия Wp(p)Wor(p)=1 и Wkf(p)Wp(p)Wor(p) -Wof(p)=0, Y(p)=R(p). Структура автоматической системы принципиально позволяет получить управление без ошибок. Однако практическая реализация такой системы наталкивается на затруднения. Достоинства: Возможна полная компенсация действия возмущения. Компенсирующее устройство не влияет на устойчивость. Простота регулятора. Недостатки: Необходимо сравнительно точно измерять возмущающие воздействия, что не всегда может быть выполнено, так как возмущающие силы обычно не поддаются точному измерению. Реализация регулятора в общем случае невозможна, так как в передаточной функции Wp(p)=1/Wor(p) порядок числителя, как правило, выше порядка знаменателя. Регулирование по возмущению может быть использовано лишь для объектов устойчивых. Компенсируется только измеренное возмущение. Приборы для измерения возмущений сложные и дорогие. Такие системы применяются в тех случаях, когда не требуется высокая точность выполнения алгоритма функционирования объекта. или
или  (12.3)
(12.3) (12.4)
(12.4) = 1/Ти параметры настройки И – регулятора, Ти - постоянная интегрирования
= 1/Ти параметры настройки И – регулятора, Ти - постоянная интегрирования . Чем больше
. Чем больше 


