
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Глава7. Механические характеристики конструкций рэсСодержание книги
Похожие статьи вашей тематики
Поиск на нашем сайте
В данном разделе курса продолжается рассмотрение содержания действий в процессе проектирования конструкций РЭС. Главным является изучение основ теории и практики обеспечения защищенности РЭС от внешних механических воздействий за счет обеспечения соответствующих механических характеристик конструкции. Для достижения цели необходимо рассмотреть виды воздействий, механические характеристики конструкций РЭС, способы и конструктивную реализацию защиты, а также основные положения методик анализа поведения конструкций при механических воздействиях.
7.1. Виды и характеристики механических воздействий на РЭС
В процессе эксплуатации, транспортировки и хранения изделия могут испытывать механические воздействия, характеризуемые диапазоном частот колебаний, амплитудой, ускорением, временем действия. Причинами механических воздействий могут быть вибрации движущихся частей двигателя, перегрузки при маневрировании, стартовые перегрузки, воздействие окружающей среды /ветер, волны, снежные лавины, землетрясения, обвалы и т.п., взрывные действия, небрежность обслуживающего персонала и т.п. Стационарная и переносная аппаратура может подвергаться механическим воздействиям при транспортировке, землетрясениях и взрывах. При перевозке сухопутным транспортом возникают удары, толчки и тряска, особенно во время торможения и маневрирования на большой скорости по грунтовым дорогам, на уклонах и подъемах. Вибрация возникает при периодическом биении колес о стыки рельс, неровностям и швам на дорогах. Частота вибраций может достигать сотен и тысяч герц. На судовом транспорте ударные механические нагрузки создаются во время шторма при ударах штормовой волны и качке судна. Вибрационные нагрузки на судах обусловлены работой винтов и двигателей. Частота и амплитуда вибраций зависят от типа судна, его машинного оборудования и места расположения РЭС, но обычно не превышает 150 Гц. Ударные нагрузки в самолетах возникают при посадке. Перегрузка в 10...15 g соответствует резкой посадке, а 30 g - аварийной. Вибрации имеют место в течение всего полета (до 2000 Гц). Повреждения на ракетах и спутниках могут произойти от сильного акустического шума при запуске двигателя, уровень которого может превышать 140 дБ. Аппаратура может подвергаться ударам и толчкам из-за обслуживающего персонала и различных случайностей. Так при падении аппаратуры на бетонный пол с высоты 0,5 м величина ускорения может достигать 550 g. Значительные нагрузки возникают при взрывах (200...400 g). В результате воздействия ударов, вибраций и линейных ускорений могут иметь место следующие повреждения РЭС: n нарушение герметизации из-за нарушения паяных, сварных и клеевых швов и появление трещин в металлостеклянных спаях; n полное разрушение корпуса или отдельных его частей от механического резонанса и усталости; n обрыв монтажных связей; n отслаивание печатных проводников; n расслаивание многослойных печатных плат; n поломка керамических подложек ИС; n выход из строя разъемных и неразъемных электрических контактов; n модуляция размеров волновых трактов; n смещение положения органов управления и настройки; n выход из строя механических узлов (подшипников, зубчатых зацеплений, крепежа и т.п.). Механическое разрушение приводит к полному выходу аппаратуры из строя. От 29 до 40% отказов самолетного электронного оборудования вызываются действиями механических нагрузок, а число отказов бортовых вычислительных машин - до 50%. Воздействие ударно-вибрационных нагрузок значительно снижает надежность РЭС. Качественно все виды механических воздействий можно разделить на вибрации, удары, линейные ускорения и акустический шум. Количественно все перегрузки можно охарактеризовать спектром гармонических частот и стационарностью процесса.
7.1.1. Вибрации в конструкциях РЭС
Под вибрацией аппаратуры понимают механические колебания ее элементов или конструкции в целом. Вибрация может быть периодической и случайной. Периодическая вибрация может быть гармонической и полигармонической. Гармоническая вибрация сравнительно редко встречается в реальных условиях, но широко используется при лабораторных испытаниях и при анализе динамических характеристик конструкции и для определения реакции системы при более сложных формах вибрации. Параметрами воздействия вибрации являются частота и ускорение.  или виброускорения или виброускорения  . . 
Z(t) =
где SZ - амплитуда виброперемещения;
w - круговая частота вибрации, 1/с. t - время,с. Рис. 7.1. Виброперемещение при гармонической вибрации.
Как известно, круговая частота связана с частотой вибрации f(Гц) выражением w = 2pf По заданному значению виброперемещения при гармонической вибрации легко найти амплитуду виброскорости
Если же задано максимальное значение (амплитуда) виброускорения, то амплитуда гармонической вибрации равна
SZ =
Амплитуда виброускорения часто задается в единицах ускорения свободного падения g, (g = 9,81 м/с2). В этом случае амплитуда виброперемещения (в миллиметрах) равна
SZ» 250
где
В реальном случае РЭС подвергается влиянию целого спектра частот вибрации, т.е. вибрация сложная периодическая - полигармоническая.
Рис.7.1. Виброперемещение при гармонической вибрации.
Из-за ограниченных энергетических возможностей источников вибрации высшие гармоники имеют малую амплитуду. Поэтому, а также из-за трудностей учета всех гармоник, в рассмотрение принимают главным образом низкочастотную часть спектра и, в первую очередь, гармоники с относительно большими амплитудами.
7.1.2. Линейное и центробежное ускорение в конструкциях РЭС Линейное ускорение характеризуется величиной ускорения и возникает при изменении скорости движения; центробежное возникает при изменении направления движения. Влияние линейного и центробежного ускорений на РЭС одинаково и зависит лишь от их величины. При расчетах аппаратуры, работающей в условиях линейных ускорений, последние обычно считаются равными максимальному их значению за все время действия, либо изменяющимися по ступенчатому или линейному закону. Линейное ускорение часто задается в виде перегрузки - отношения действующего ускорения к ускорению свободного падения.
Рис. 7.3. Пример изменения линейного ускорения
7.1.3. Удары в конструкциях РЭС.
Аппаратура может подвергаться ударным воздействиям, возникающим при транспортировке, монтаже или эксплуатации, при действии ударной волны и т.д. Удар - кратковременное (длительностью менее 0,1 с) и непериодическое силовое воздействие на элементы конструкции со стороны объекта - носителя. Удар характеризуется длительностью импульса и ускорением. Интенсивность ударного воздействия зависит от формы, амплитуды U и длительности ударного импульса. Формой ударного импульса называется зависимость ударного ускорения от времени u(t). Для упрощения при расчетах форму ударного импульса идеализируют, заменяя ее подходящей более простой формой, например - прямоугольной, треугольной, полусинусоидальной и т.д.
Рис. 7.4. Форма ударного импульса
В процессе эксплуатации аппаратура может подвергаться действию не только одиночных, но и многократных ударов. В этом случае нормируется количество ударов и минимальный период их следования. Ударные воздействия возникают также при падении блока с некоторой высоты H. Такой вид удара имеет место, в частности, при небрежной перестановке блока РЭС на новое место, при погрузочно-разгрузочных работах.
7.1.4. Шум и акустические удары в конструкциях РЭС.
Сильные шумы и акустические удары с уровнем шума свыше 140 дБ вызывают высокочастотную вибрацию, опасную для различных элементов РЭС. Особенное внимание акустическим воздействиям придается при размещении РЭС вблизи реактивных двигателей и подобных им других источников шума. Характеризуется акустический шум звуковым давлением и спектром звуковых частот.
7.1.5. Характеристики внешних воздействий для различных групп РЭС.
Характеристики внешних воздействий на РЭС определяется в целом условиями применения, а в частности - объектом-носителем. Существует несколько вариантов классификации РЭС и, соответственно, несколько вариантов требований по механических воздействиям, исходя из указанных причин. С целью стандартизации требований к аппаратуре механические воздействия классифицируются по степеням жесткости вибрационных, ударных, линейных и центробежных нагрузок.
Таблица 7.2.Характеристика и степени жесткости вибрационных нагрузок
Таблица 7.3.Характеристика и степени жесткости ударных нагрузок.
Таблица 7.4.Характеристика и степени жесткости линейных и центробежных нагрузок.
Указанные в таблицах степени жесткости механических воздействий должны применяться, в частности, при составлении технических заданий на разработку и модернизацию изделий. Степени жесткости XVI-XX по вибрационным нагрузкам устанавливают для изделий миниатюрных конструкций (микросхемы, резисторы и т.п.). Степени жесткости XX по вибрационным нагрузкам устанавливают в технически обоснованных случаях в качестве дополнительного требования к другим степеням жесткости. ГОСТ 16962-71 рекомендует также устанавливать требования к резонансным частотам. Изделия без амортизаторов и их отдельные узлы и детали не должны иметь резонансных частот в диапазоне до 20 Гц (I степень жесткости), до 40 Гц (II степень) и до 100 Гц (III степень жесткости). Указанные в таблицах степени жесткости используют при классификации аппаратуры по условиям применения. Пример классификации аппаратуры иного назначения содержится в ГОСТ 21322-75. Стандарты распространяются на изделия электронной техники, предназначенные для использования в устройствах широкого применения (бытового и общепромышленного), а также поставляемых на экспорт (табл. 7.5). В стандарте определяются группы исполнения изделий и устанавливаются требования по вибрационным нагрузкам и многократным ударам для каждой классификационной группы. Требования по другим воздействующим факторам устанавливаются в соответствии с ГОСТ 16962-71 в тех случаях, когда наличие этих факторов обусловлены условиями применения.
Таблица 7.5. Классификация изделий по условиям применения и требования к устойчивости по механическим воздействиям.
7.2. Обеспечение защищенности конструкции РЭС от механических воздействий
7.2.1. Характеристики защищенности РЭС от механических воздействий
Механические воздействия на РЭС вызывают разного рода деформации (растяжение, сжатие, прогиб, вибрацию) всех элементов конструкции РЭС. В результате происходят обратимые и необратимые изменения в элементах и РЭС в целом. Способность РЭС противостоять изменениям устанавливается в виде соответствующих требований к свойствам конструкции. Различают требования устойчивости и прочности при механических воздействиях на конструкцию. Под устойчивостью понимают способность выполнять все функции в условиях воздействия, а под прочностью - способность противостоять разрушающему воздействию в течение срока службы. Отсюда следуют понятия вибро- и ударопрочности. В и б р о п р о ч н о с т ь ю называется свойство конструкции противостоять разрушающему действию вибрации в заданном диапазоне частот и ускорений и продолжать выполнять свои функции после окончания воздействия вибрации. Т.е. вибропрочность связана с транспортировочной вибрацией (аппаратура выключена). В и б р о у с т о й ч и в о с т ь ю называется свойство конструкции выполнять функции при воздействии вибрации и ударов в заданных диапазонах частот и ускорений. Т.е. виброустойчивость связана с эксплуатационной вибрацией (аппаратура включена).
7.2.2. Задача обеспечения защищенности РЭС от механических воздействий.
Известно, что РЭС - сложная система, состоящая из множества элементов с конечными массами, объединенных в пространстве механическими связями различной жесткости и демпфирования и подвергающаяся механическим воздействиям. Реальные механические воздействия представляют собой случайные процессы, требующие сложного математического описания. Часто применяют детерминированный подход, который заключается в описании математических воздействий простыми функциями с неслучайными (детерминированными) параметрами. Задача конструктора РЭС состоит в обеспечении таких свойств устойчивости и прочности конструкции, которые требуются по техническому заданию (ТЗ) на изделие. В общем случае указанная задача представляет собой задачу синтеза механической системы с наилучшими в определенном смысле характеристиками. Для решения необходимо формализованное описание механической системы и процесса распространения энергии в ней. Точное описание объекта как механической системы в данном случае затруднено. В практике оценочных инженерных расчетов рассматривают РЭС как эквивалентную механическую колебательную систему с одной степенью свободы и сосредоточенной в центре тяжести (ЦТ) массой m, связанной с опорой или вибрирующей платформой (носителем), элементом с общей жесткостью КZ и коэффициентом КДМ.
Рис. 7.5.Механическая модель конструкции РЭС.
При более детальном рассмотрении даже одномассовая система (твердое тело) должна быть описана с учетом в общем случае шести степеней свободы.
Рис. 7.6. Формализованное описание механической системы и процесса распространения энергии.
Очевидно, что решение задачи анализа поведения какого-либо элемента конструкции РЭС даже при указанном формализованном упрощенном описании чрезвычайно затруднительно. А решение же задачи синтеза механической системы в общем случае формализованным способом становится невозможным. Однако практика проектирования конструкций РЭС должна решать эту задачу в каждом конкретном случае. Далее рассмотрим способы решения, исходя из введенного ранее системного представления РЭС.
7.3. Способы обеспечения защищенности РЭС от механических воздействий
Рассматривая механическую подсистему SМ РЭС с общих позиций, можно полагать, что для синтеза системы SМ = {ПМ, ГМ, qМ, ЕМ}необходимо определить: n совокупность принципов ПМ; n множество элементов ГМ системы; n вариант схемы qМ механического объединения элементов ГМ; n множество параметров ЕМ элементов и системы в целом. Очевидно, что элементы ГМ системы включают в себя, в общем случае, как множество элементов ГМ¢ cобственно конструкции РЭС, так и множество ГМ¢¢ обеспечивающих необходимую защищенность ее от механических воздействий, т.е. ГМ = ГМ¢UГМ¢¢. Рассмотрим далее принципы ПМ, элементы ГМ и схемы построения qМ наиболее эффективно решающие задачи обеспечения устойчивости конструкций РЭС при механических воздействиях.
7.3.1. Принципы и основные элементы обеспечения защищенности РЭС
Причиной отрицательных явлений в конструкциях при наличии механических воздействий является механическая энергия поступающая на рассматриваемый объект. Типичная схема распространения энергии в РЭС имеет следующий вид:
Рис. 7.7.Схема распространения механической энергии в РЭС.
Оценивая с общих позиций ситуацию, можно сделать вывод, что защитить объект от разрушающей энергии можно используя следующие принципы ПМ: n изолировать его от источника энергии; n повысить защитные свойства самого объекта; n комбинация предыдущих принципов. Для того, чтобы осуществить первый принцип p1 защиты, необходимо наличие специальных элементов ГМ¢¢, второй же принцип p2 не требует обязательно этих элементов. Известно, что для изоляции объекта от механической энергии возможно использовать эффекты отражения и/или поглощения энергии. Так появились два типовых элемента - пружина и демпфер. В целом в практике для реализации первого подхода используют специальные элементы - а м о р т и з а т о р ы, а также всевозможные и з о л и р у ю щ и е п р о к л а д к и, с л о и, э л е м е н т ы и т.д. Особенно необходимо отметить то, что при конструировании на пути распространения волновой энергии механических колебаний располагают дополнительное приспособление, отражающее и одновременно поглащающее часть этой энергии. Такие приспособления называют а м о р т и з а т о р а м и. Поглощение энергии называется д е м п ф и р о в а н и е м. Оно обусловлено рассеянием энергии в результате трения в материале амортизатора (резина), в сочленениях (сухой демпфир), в среде (воздушный и жидкостный демпфер). Повышение защитных свойств самого объекта реализуется множеством способов, но в основе их - оптимизация пространственного решения и выбор соответствующих материалов изделия. Типовые элементы ГМ¢¢, обеспечивающие реализацию второго принципа защиты, а также наиболее эффективные схемы qМ их объединения, будут рассмотрены далее. Предваряя их изучение, укажем основные теоретические положения поведения механических систем при наличии воздействий на них.
7.3.2. Виброчастотная характеристика конструкции.
Под виброчастотной характеристикой понимается зависимость амплитуды x колебаний механической системы от частоты f возбуждающей вибрационной нагрузки, x = j(f). Для механической системы, которую можно представить в виде простейшей механической системы, виброчастотная характеристика имеет следующий вид (рис. 7.8):
Рис. 7.8. Виброчастотная характеристика.
Анализируя виброчастотную характеристику для простейших механических систем, установлено, что защита от динамических воздействий возможна при повышении собственной частоты f0 системы в 2...3 раз по отношению к частоте вибрационного воздействия (или верхней частоте спектра). Наличие резонанса в механической системе при совпадении частоты вибрационных воздействий f и собственной частоты f0 системы приводит к многократным увеличениям амплитуды перемещения массы m и, следовательно, к увеличению перегрузок.
7.3.3. Способы обеспечения защищенности РЭС от механических воздействий.
Частота собственных колебаний f0 системы зависит от ее конструктивных параметров, и может изменяться в зависимости от принимаемых конструктором решений. Во избежание резонансных явлений резонансные частоты электрорадиоэлементов должны быть в 2..3 раза больше резонансных частот печатных узлов, а резонансные частоты печатных узлов и остальных частей конструкции должны в 2...3 раза превышать верхнюю частоту спектра входных воздействий. При невозможности обеспечить последнее требование за счет изменения свойств только перечисленных частей конструкции, блок РЭС должен быть установлен на амортизаторы, что приведет к уменьшению верхней частоты спектра входных воздействий непосредственно на блок. Сами же несущие конструкции блока (шасси, стойки), выполняются достаточно жесткими, с большой резонансной частотой, вследствие чего колебания к печатным узлам передаются без изменения амплитудно-частотного спектра. Таким образом для защиты РЭС от механических воздействий существует несколько способов реализации указанных подходов. К первой группе относятся методы направленные на повышение резонансных частот конструкции с целью выхода их за пределы частотного спектра входной вибрации. Вторая группа методов заключается в применении вибропоглощающих материалов и направлена на уменьшение коэффициента передачи колебаний при резонансе и, следовательно, на уменьшение вибронагрузок на конструкцию. Под коэффициентом передачи вибраций понимается отношение амплитуд колебаний на выходе и входе механической системы при заданной частоте. Третья группа методов основана на использовании амортизаторов, уменьшающих верхнюю частоту спектра вибрации.
7.4. Конструктивная реализация защищенности РЭС от механических воздействий.
Рассмотрим последовательно все три подхода и их конструктивную реализацию.
7.4.1. Повышение резонансных частот конструкции
Известно, что для полного устранения резонансных явлений в конструкции необходимо, чтобы резонансные частоты деталей, печатных плат и электрорадиоэлементов в 2-3 раза превосходили верхнюю границу частотного спектра вибрации, воздействующей на блок. Способы повышения резонансных частот вытекают из анализа формул для их расчета. Расчет собственных колебаний элементов и узлов реальных конструкций (корпусов, печатных плат, ЭРЭ и др.) обычно является трудоемкой задачей. Поэтому на практике конструкции заменяют эквивалентными расчетными схемами, для которых известны расчетные зависимости. Наиболее распространенным способом приближенного расчета собственных колебаний является замена реальной конструкции балочными схемами и пластинами. К таким конструкциям относятся ЭРЭ на платах, укрепленные на выводах, корпуса, кронштейны, печатные платы и другие детали. Частоты собственных колебаний балочных конструкций могут быть определены по формуле:
где j - безразмерный коэффициент, значение которого зависит от вида конструкции и способа закрепления; l - длина конструкции; Е - модуль упругости материала конструкции; J - момент энерции сечений конструкции; m - погонная масса конструкции. Собственные частоты прямоугольных пластин постоянной толщины, состоящие из упругого однородного материала (монтажные платы, крышки и др.), определяются по формуле:
f0 = (ch/a2)104 ,
где f0 - собственная частота, Гц; с - коэффициент, зависящий от способа закрепления платы, соотношения сторон и материала платы; а - длина пластины, см; h - толщина пластины, см.
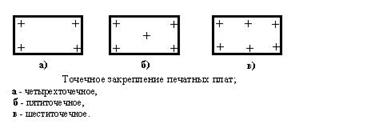
Многослойную пластину, неоднородную по толщине (печатную плату), приводят к однородной однослойной пластине. Очевидно, что для повышения резонансной частоты f0, конструктор может менять конструктивные характеристики конструкций и материалы элементов. В частности повысить резонансную частоту поперечных колебаний печатных плат можно следующими способами: n применить более жесткое закрепление краев платы (например, рамочную конструкцию с приклеиванием краев печатной платы); n уменьшить размеры печатной платы или применить квадратную конфигурацию; n увеличить толщину печатной платы; n применить материал основания печатной платы с большим модулем упругости (например, вместо гетинакса - стеклотекстолит, вместо стеклотекстолита - дюралюминий); n сделать дополнительное крепление центра печатной платы к шасси блока; n применить ребра жесткости и т.д. Наибольшую опасность представляет собой поперечные колебания печатных плат, так как их резонансная частота значительно ниже, чем продольных. Оценим влияние различных вариантов закрепления ПП в конструкциях РЭС. Различают точечное закрепление печатной платы в конструкции блока и сплошное. При точечном закреплении печатная плата крепится винтами в нескольких точках.
Рис. 7.9. Точечное закрепление печатных плат.
При сплошном закреплении крепится одна или несколько сторон платы целиком. Различают следующие случаи сплошного закрепления сторон печатной платы: зажатый край (или жесткое защемление), опертый край (или шарнирное опирание) и свободный край. Эти три случая являются идеализацией реальных способов закрепления. Так, закрепление сторон платы в направляющих блока принимают за шарнирное опирание. Зажатым краем считается край платы с многоконтактным разъемом с жесткими выводами.
Рис. 7.10. Обозначение способов сплошного закрепления сторон печатной платы.
Для повышения значения резонансной частоты f0 для ПП необходимо выбирать при точечном варианте пяти - или шеститочечный случай, а при сплошном - зажатый по периметру вариант закрепления. Для повышения резонансной частоты электрорадиоэлементов существует два способа: n уменьшение длины выводов; n приклеивание электрорадиоэлемента к печатной плате. При установке электрорадиоэлементов на клей резонансная частота определяется только собственными колебаниями выводов, и поэтому в вибропрочных конструкциях их длина должна быть минимальной. В завершении следует указать, что повышение резонансной частоты конструктивных элементов позволяет лишь исключить резонанс, но не предотвращает воздействия на элемент внешней механической энергии.
7.4.2. Применение вибропоглощающих материалов в конструкции РЭС.
В случае невозможности вывода резонансной частоты f0 конструкции за пределы диапазона воздействующих частот необходимо уменьшить коэффициент передачи энергии. Известно, что коэффициент передачи колебаний печатной платы на резонансной частоте обычно пропорционален коэффициенту механических потерь g. Для увеличения коэффициента механических потерь (КМП) и, следовательно, для уменьшения резонансных явлений в конструкции используют полимерные вязкие компаунды с большим КМП. Наиболее часто используют следующие варианты: n приклеивание электрорадиоэлементов к плате вибропоглащающим компаундом; n заливка платы; n применение многослойных печатных плат, слои которых склеены вибропоглащающим компаундом.
Рис. 7.11. Заливка платы вибропоглащающим материалом.
Варианты структур, указанные на рис.7.11, имеют свои достоинства и недостатки. Выбор осуществляется в каждом конкретном случае, исходя из соответствующих требований.
7.4.3. Конструкции РЭС с амортизаторами.
Принцип виброизоляции заключается в размещении между объектом установки и РЭС специальных устройств- амортизаторов, которые поглощают и отражают механическую энергию. Поглощение энергии колебаний происходит демпфированием за счет трения в материале амортизаторов или в демпферах с сухим или вязким трением между элементами конструкции. Наиболее эффективно использование этого подхода при защите от вибрационных нагрузок. Уменьшить степень влияния вибрации на блок можно с помощью установки блока на амортизаторы (виброизоляторы). (В соответствии с ГОСТ 34246-80 «Вибрация. Термины и определения» термин «амортизатор» заменен на термин «виброизолятор».), которые с одной стороны прикрепляются к блоку, а с другой - к основанию на объекте - носителе. Виброизолятор представляет собой колебательную систему с низкой резонансной частотой и с малым коэффициентом передачи колебаний в зарезонансной области. За счет этого уменьшается частотный спектр вибрации, передаваемой от основания к блоку. Блок, установленный на виброизоляторах, имеет 6 степеней свободы: может независимо колебаться вдоль трех координат и вокруг них. В простейшем случае рассматривают колебания блока с одной степенью свободы. Эффективность виброизоляции оценивается к о э ф ф и ц и е н т о м и з о л я ц и и g, равным отношению амплитуды возмущающих колебаний к амплитуде вынужденных колебаний амортизированного РЭС. В наиболее простом случае объект установки с массой М совершает колебания x(t) = Аsinwt. Амплитуда колебаний А от объекта установки до РЭС с массой m здесь ослабляют амортизаторы с жесткостью k и демпфированием b.
Рис. 7.12. РЭС с амортизаторами.
Уравнение движения данной системы можно написать в виде неоднородного дифференциального уравнения. Колебания РЭС x(t) находят как сумму общего и частного решения этого уравнения. В установившемся режиме в системе возникают колебания с частотой w и амплитудой:
D = A
Пренебрегая демпфированием, получаем соотношение для коэффициента виброизоляции:
l =
Величина, обратная коэффициенту виброизоляции, называется коэффициентом динамичности h. На рисунке 7.12 показана зависимость коэффициента динамичности h от отношения ww0 при различных значениях демпфирования. Из графиков видно, что амортизаторы функционируют лишь в области частот ww0>
А. Схемы монтажа амортизаторов.
Рассмотрим наиболее распространенные схемы расположения амортизаторов относительно центра тяжести аппарата. Схема нижнего монтажа используется чаще всего. Но при боковой вибрации возникают связанные колебания, поэтому следует предусматривать достаточный зазор между блоками и соседними конструкциями, чтобы избежать соударения.
Рис. 7.13. Схемы монтажа амортизаторов.
Схему, в которой амортизаторы расположены в плоскости, проходящей через центр тяжести, целесообразно использовать в условиях пространственного нагружения на реактивных самолетах и ракетах. Монтаж в двух горизонтальных плоскостях обычно используется, если отношение высоты блока к ширине больше двух. Схема двухстороннего монтажа обеспечивает защиту от воздействия внешних сил, действующих во всех направлениях. Амортизаторы предварительно нагружены, что делает систему более жесткой. Схема монтажа амортизаторов под углом к осям симметрии блока является наиболее пригодной для изоляции пространственной вибрации при горизонтальном положении основания. В схеме, изображенной на рис.ж характеристики системы амортизации практически одинаковы при всех положениях основания.
Б. Выбор амортизаторов.
Выбор амортизаторов производят, имея следующие данные: 1) параметры механических воздействий на носителе; 2) параметры внешней среды; 3) конструктивные параметры РЭС; 4) допустимые механические воздействия на РЭС; 5) статические и динамические характеристики амортизаторов. При выборе амортизаторов часто возникает противоречие между вышеизложенными соображениями для защиты РЭС от вибраций и требованиями к защите от ударов и линейных ускорений. Дело в том, что малая жесткость (низкая собственная частота)
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2017-02-05; просмотров: 520; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.128.198.90 (0.021 с.) |

 ;
; ;
; ,
,
 и виброускорения
и виброускорения 
 .
. [мм],
[мм], - амплитуда виброускорения в единицах g.
- амплитуда виброускорения в единицах g.







 ,
,


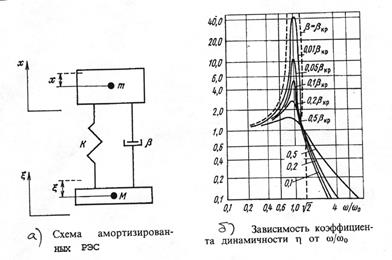

 и эффект виброизоляции повышается при ослаблении демпфирования. В области резонанса (w = w0) амортизаторы ухудшают виброизоляцию, особенно при низком демпфировании, а в области w/w0<1 виброизоляция отсутствует. Из сказанного следует, что собственная частота должна быть значительно ниже возмущающих частот.
и эффект виброизоляции повышается при ослаблении демпфирования. В области резонанса (w = w0) амортизаторы ухудшают виброизоляцию, особенно при низком демпфировании, а в области w/w0<1 виброизоляция отсутствует. Из сказанного следует, что собственная частота должна быть значительно ниже возмущающих частот.




