Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Изучение радиочастотной части для коротких расстояний беспроводной системы передачи данных BluetoothСодержание книги
Поиск на нашем сайте
4.2 Предварительная подготовка
Изучить систему передачи данных Bluetooth
Bluetooth является недорогой маломощной технологией для построения радиосетей для небольших расстояний [1]. Эта технология была первоначально разработана для устранения кабельных соединений к электронным приборам таких, как беспроводные наушники.
Таблица 4.1 - Спецификация системы Bluetooth
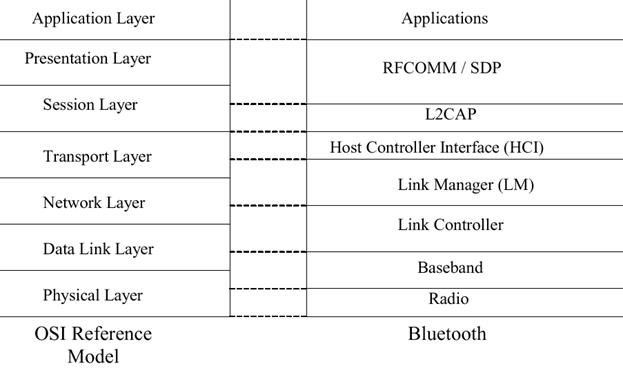
Система Bluetooth должна обеспечить возможность создания неболь-ших персональных сетей (PAN - Personal Area Network). Спецификация Bluetooth определяет две системы радиосвязи, которые изучаются в этой лабораторной работе, а также стек протоколов. На рисунке 4.1 приведено сравнение между моделью взаимодействия открытых систем ISO и модель Bluetooth.
Рисунок 4.1 - Сравнение между моделью взаимодействия открытых систем ISO и модель Bluetooth
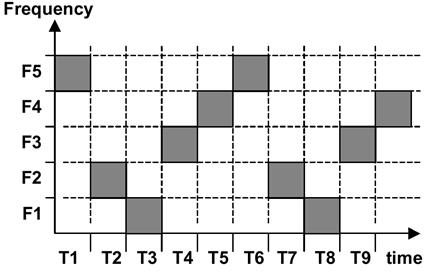
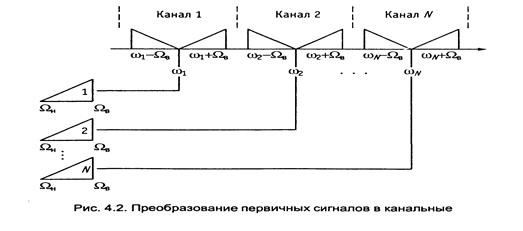
Рассмотрим кратко функции системы Bluetooth уровни до части контроллера линков (Link Controller). Радио-часть, называемая BlueRF отвечает за радио-интерфейс, такой как модуляция, поскольку основная полоса частот отвечает за канальное кодирование и декодирование, низкий уровень управления синхронизацией и менеджмент линками пакетов данных. Контроллер линков откликается на команды более высокого уровня от менеджера линков и несет из операции уровня линка поверх несколько продолжительностей пакета данных как процесс установления соединения от пакета к пакету. Bluetooth должен конкурировать с другими технологиями, как беспроводные локальные сети, поскольку он использует тот же самый свободный от лицензий спектр ISM (индустриальный, научный и медицинский) 2.4 GHz, который, как ожидается, будет переполнен. Поэтому, этот метод, называемый расширением спектра с прыгающей частотой (FHSS - frequency hopping spread spectrum), используется для устройств Bluetooth, чтобы они могли соединиться между собой. Метод прыгающей частоты заключается в передаче сигнала данных в короткий промежуток времени или временной интервал (timeslot) на одной несущей частоте и передаче на другой несущей частоте в следующем временном интервале, как показано на рисунке 4.2. Перескок (hopping) может быть выполняться на уровне битов. Это означает, что каждый отдельный информационный бит может передаваться на различных несущих частотах. Для каждого переданного пакета устройство Bluetooth повторно настраивается на следующий радиоканал в последовательности перескоков (hopping); поэтому Bluetooth выполняет перескок на уровне пакета. Для правильного приема данных получатель должен знать точную последовательность перескоков передатчика. Таким образом, синхронизация между передатчиком и приемником является критическим местом в связи с перескоком частот.
Рисунок 4.2 - Метод расширения спектра перескоком частоты
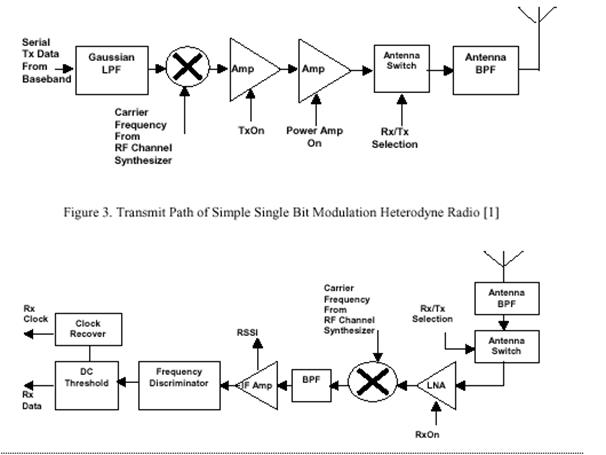
Радиоканал Bluetooth является каналом с перескоком, в котором время между перескоками равно 625µsec [3]. Устройство Bluetooth, называемое мастер управления каналами с перескоками, определяет последовательность перескоков для всех других устройств называемых ведомыми (slaves). Полное дуплексное соединение между устройствами получается с помощью дуплексного разделения времени (TDD - time division duplex). Ведущее устройство использует опрос для каждого слота ведущий-ведомый и решает, какому из ведомых устройств будет разрешена передача. Bluetooth использует модулятор гауссовской манипуляции (GFSK - Gaussian Frequency Shift Keying), который генерирует положительное отклонение частоты, когда передается двоичная 1, и отрицательное отклонение частоты, при передаче двоичного 0. Наконец, рабочий диапазон составляет приблизительно от 10 м до 100 м в зависимости от передаваемой мощности от 0 dBm до 20 dBm. Наконец, рабочий диапазон составляет приблизительно от 10 м до 100 м в зависимости от передаваемой мощности от 0 dBm до 20 dBm. Радиочасть Bluetooth может быть выполнена на основе структур с нулевой промежуточной частотой (IF - Intermediate Frequency) или прямого преобразования, гетеродинной модуляции или модуляции отдельным битом, IQ модуляцией многоуровневых отсчетов, используя поисковые таблицы, и прямую передачу модуляции на передающий синтезатор. На рисунках 4.3 и 4.4 показаны пути передачи и приема, соответственно, простой гетеродинной системы с модуляцией отдельного бита. Вход передатчика и выход приемника подключены к уровню основной полосы частот.
Рисунок 4.4 - Путь приема простого радиоприемника с модуляцией отдельного бита [1]
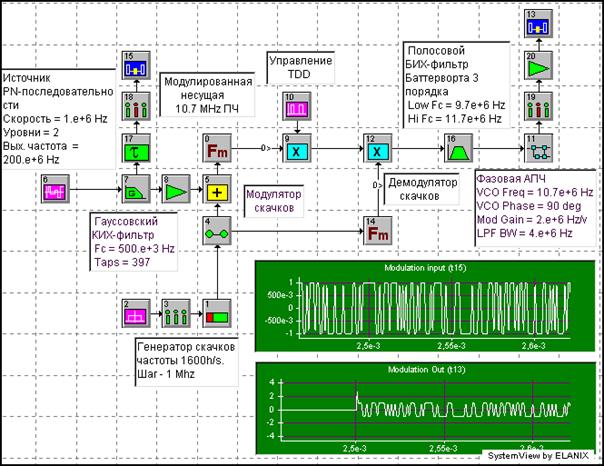
4.3 Порядок выполнения Примечание. Хотя диапазон рабочих частот системы Bluetooth находятся в полосе 2.4GHz, намного более удобно и просто выполнить моделирование системы в диапазоне основной полосы частот. В нашем примере не используется модуляция передаваемого сигнала на частоте 2.4GHz. 4.3.1 Соберите систему в соответствии с рисунком 4.5, листом соединений (Connection List) и списком параметров системы (System Summary).
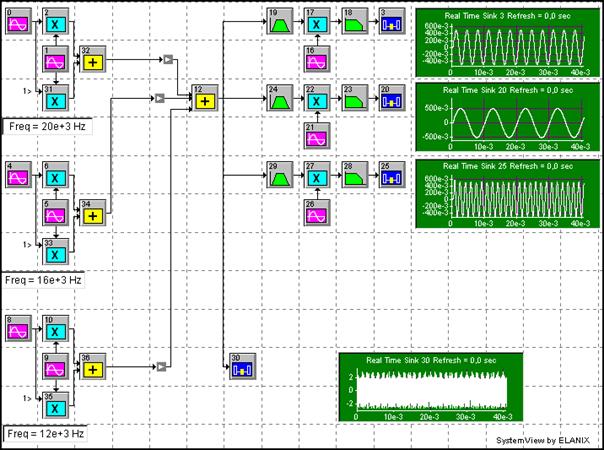
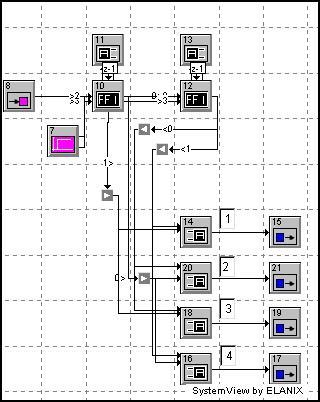
Рисунок 4.5 - Схема моделирования системы Bluetooth
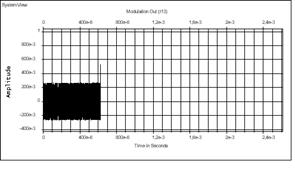
Генерация команд скачка частоты. Модули 1, 2, 3 и 4 генерируют частотные команды FH. Модуль 2 является генератором однородного набора случайных чисел в диапазоне от 0 до 79·106 (79 частот и разнос - 1 МГц). Выходной сигнал этого модуля затем дискретизируется по скорости скачков, равной 1600 скачков/сек. Целая часть генерирует частотную команду скачков. Генерация частотных данных. Сигнал от источника данных 1 MBps (модуль 6) поступает на гауссовский ФНЧ (модуль 7), установленный для создания ЛУ (BT), равного 0.5. Далее сигнал усиливается модулем 8 в 140000 раз. Это позваоляет получить желаемый индекс частотной модуляции 0.28. Модулятор GFSK. Управляющий сигнал скачка частоты добавляется к сигналу данных, и композитный сигнал управляет модулятором на базе генератора, управляемого напряжением ГУН (модуль 0). ГУН установлен на номинальную частоту 10.7 МГц. При демодуляции сигнала все скачки сводятся к этой промежуточной частоте. Управление TDD. Управление TDD достигается обнулением выхода модулятора. Период сигнала прямоугольной формы (модуль10) устанавливается равной 1.25 мс. Он включается на 625 мкс и затем отключается на 625 мкс. Демодуляция скачков частоты. Команды скачков частоты используются для управления ГУН (модуль14). Выход ГУН смешивается с полученным сигналом СПЧ. Разностная частота равна 10.7 МГц промежуточной частоты, а суммарная частота устраняется полосовым фильтром (модуль16). При Обработке. После операция восстановления сигнала перескока частоты, результирующий сигнал находится на 10.7 МГц. Трехполюсный БИХ-фильтр (модуль16) с полосой пропускания ниже Fc, равной 9.7e+6 Гц, и выше Fc, равной 11.7e+6 Гц, используется как стандартный фильтр промежуточной частоты. При Обработке. После операция восстановления сигнала перескока частоты, результирующий сигнал находится на 10.7 МГц. Трехполюсный БИХ-фильтр (модуль16) с полосой пропускания ниже Fc, равной 9.7e+6 Гц, и выше Fc, равной 11.7e+6 Гц, используется как стандартный фильтр промежуточной частоты. Демодуляция ФАПЧ. Фазовая АПЧ (модуль11) используется, чтобы непосредственно демодулировать сигнал на 10.7 МГц промежуточной частоты. Модуль ФАПЧ имеет внутренний ФНЧ после фазового детектора для устранения суммарной частоты замкнутой цепи. Частота среза устанавливается на 4 МГц, который достаточно широка для передачи желаемого сигнал. Усиление модуляции устанавливается на 2e6. Это дает время реакции цепи, достаточное для демодулирования сигнала. 4.3.2 Выполните моделирование Просмотрите входной и выходной модулированные сигналы в соответствующих окнах получателей сигналов (модули 15 и 13, соответственно). 4.3.3 Установите временные характеристики моделирования:
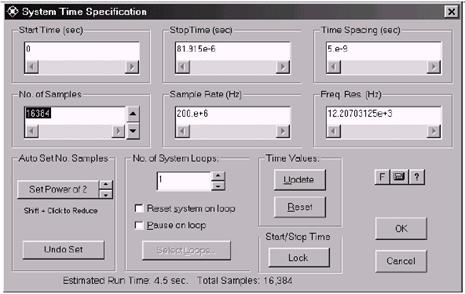
Start Time, μsec................................................................. 0 Stop Time, μsec................................................................. 81.915 No. of Samples.................................................................. 16384 Sample Rate, MHz............................................................. 200 Система Bluetooth является дуплексной системой с временным разделением (TDD - Time Division Duplex). Продолжительность каждого слота составляет 62 μsec. Поэтому, время моделирования меньше длительности одного тайм-слота Bluetooth. Модуль управления TDD в верхней части схемы ограничивает временной интервал для передатчика. Можно увеличить время моделирования, чтобы увидеть результат управления TDD путем установки времени останова, равной 120 μsec. Запустите процесс моделирования и просмотрите изменения в выходном сигнале после окончания тайм-слота. После этого установите время останова снова равным 81.91 μsec.
Рисунок 4.6 - Окно установки системного времени
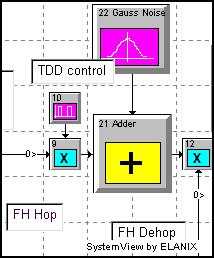
4.3.4 Перетащите указатель динамического системного пробника, расположенного в правом нижнем углу окна проектирования, на модуль 6 (источник PN-последовательности). Это позволит просматривать выходной сигнал модуля во время проектирования. Теперь запустите моделирование нажатием кнопки F5. Переведите кнопку "Time" (Время) динамического системного пробника в положение "Frequency" (Частота). Это переведет пробник в режим спектроанализатора. Обратите внимание, что максимальный частотный диапазон сигнала может быть равен 100 MHz. Как это связано со скоростью дискретизацией, установленной при моделировании? Подключите вход B динамического системного пробника к модулю 12. Переведите режим работы пробника в двухканальный режим, чтобы иметь возможность наблюдать два канала одновременно. После этого подключите вход B пробника поочередно к модулям 16, 11, 19 и 20, чтобы просмотреть сигналы в этих точках схемы. Сравните параметры этих сигналов. Закройте окно пробника после завершения процесса моделирования. 4.3.5 Модификация проекта В данном пункте исследуется влияние аддитивного белого гауссовского шума (АБГШ или AWGN - additive white Gaussian noise). Для этого необходимо добавить в схему модули сумматора и источника АБГШ, как показано на рисунке 4.7.
Рисунок 4.7 - Установка источника помех (аддитивного белого гауссовского шума). Введенные элементы для наглядности показаны в увеличенном виде.
Установите параметры источника АБГШ следующими: Std Deviation (v).................................................................... 0,1 Mean...................................................................................... 0
Подключите динамический системный пробник к источнику АБГШ для того, чтобы можно было наблюдать форму АБГШ. Переведите пробник в режим анализатора спектра и сделайте вывод о свойствах АБГШ.
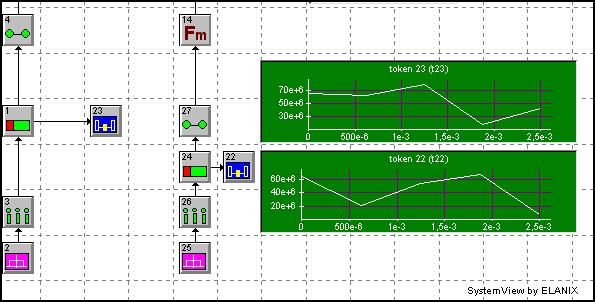
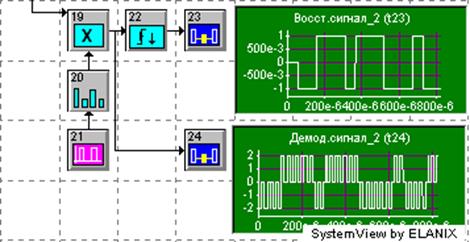
Измените параметры источника АБГШ на следующие: Std Deviation (v).................................................................... 0,5 Пронаблюдайте изменения в выходном сигнале приемника. 4.3.6 Изучение влияния изменения PN-последовательности Разъедините модули 4 и 14. Продублируйте модули 1, 2, 3 и 4 вместе с относящимися к ним соединениям. Подключите вновь полученный генератор переключающей последовательности к модулю частотного модулятора 14. К выходам модулей 1 и 24 Fractional подключите получатели Sink-Real Time. Фрагмент схемы с вышеуказанными элементами приведен на рис.4.8.
Рисунок 4.8
Установите следующие временные параметры схемы: No. of Samples...................................................................... 524288 Или Stop Time (sec).............................................................. 2,621435e-3
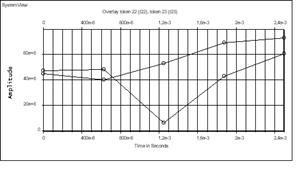
Запустите процесс моделирования. Объедините графики сигналов модулей 22 и 23 (Sink-Real time). Объясните полученные результаты.
Рисунок 4.9 - Пример моделирования с разными источниками PN-последовательности 4.4 Выводы
4.4.1 Сделайте анализ по полученным результатам
4.5 Контрольные вопросы
4.5.1 В чем заключается спецификация Bluetooth. 4.5.2 Функции системы Bluetooth. 4.5.3 Метод прыгающей частоты. 4.5.4 Объясните дуплексную систему с временным разделением (TDD - Time Division Duplex). 4.5.5 Влияние аддитивного белого гауссовского шума (АБГШ или AWGN - additive white Gaussian noise).
Лабораторная работа №5
Исследование методов частотного и временного разделения каналов
Цель работы
Изучение методов частотного и временного разделения каналов. 5.2 Предварительная подготовка Изучить методы построения устройств частотного и временного разделения каналов.
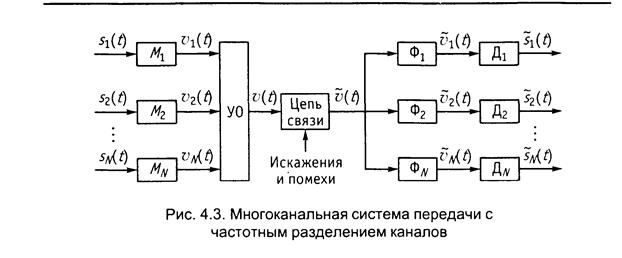
5.3 Предварительная подготовка Один из способов разделения канальных сигналов (или разделения каналов) заключается в следующем. В качестве переносчиков выбирают гармонические несущие колебания с различными частотами. В результате каждый первичный сигнал после преобразования в канальный сигнал (т.е. после модуляции) будет размещаться в своей полосе частот. В качестве примера на рис. 5.1 показано преобразование Л/ первичных сигналов, имеющих одинаковые спектры, путем модуляции по амплитуде (AM) несущих колебаний с различными частотами. Интервал между несущими частотами соседних каналов должен быть таким, чтобы полосы частот канальных сигналов не перекрывались. На рис. 5.2 представлена структурная схема многоканальной системы передачи. Первичные сигналы s1 (О, s2(t),..., sN(t) преобразуются устройствами Ц, М2..... MN\ модулированные несущие колебания v,(t), v2it),..., vN(t), полученные на выходе этих устройств, называются канальными сигналами. В отличие от первичных сигналов, имеющих общий спектр, канальные разнесены по спектру (рис. 4.2). Групповой сигнал v(f) получается объединением канальных сигналов v,(t), vz(t)..... vN(t) в устройстве объединения (УО).
На приемном конце канальные сигналы выделяются из группового с помощью разделительных частотных фильтров Ф1, Ф2,....., ФN, пропускающих сигналы своего канала и подавляющих остальные. Восстановление первичных сигналов s1(t),s2(t),..., sN(t) из канальных v1 (U),v2(t),...,vN(t) производится с помощью демодуляторов Д1, Д2,.....,ДN.
Системы передачи, в которых канальные сигналы размещаются в неперекрывающихся частотных полосах, получили название систем передачи с частотным разделением каналов (ЧРК).
5.3.1 Соберите систему передачи информации с частотным разделением (рисунок 5.2).
Рисунок 5.2
5.3.2 Запустите систему на выполнение и проверьте соответствие между передаваемыми и принимаемыми сигналами в каждом канале. 5.3.3 Установите уровень передаваемого сигнала в верхнем и нижнем каналах равным нулю (модули 0 и 8), и определите уровни паразитного сигнала в них при различных уровнях информационного сигнала (модуль 4) центрального канала. Уровень информационного сигнала может быть установлен равным 1, 2, 5 и 10 В. Полученные данные сведите в таблицу. 5.3.4 Сравните параметры каналообразующих элементов между собой и рассчитайте параметры двух дополнительных каналов, которые должны размещаться в частотных промежутках между исходными тремя каналами. Проведите проверку рассчитанных каналов на их взаимное влияние на соседние каналы. Объясните полученные результаты.
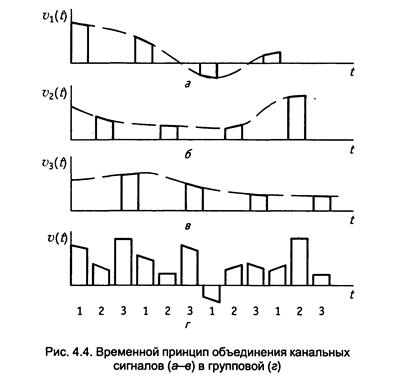
5.4 Пусть в качестве переносчика первичного сигнала s,(t) выбрана периодическая последовательность узких импульсов и осуществлена модуляция этой последовательности по амплитуде. Полученный в результате АИМ-сигнал - канальный сигнал v^(t) первого канала -показан на рис. 5.3, а. Выберем последовательность импульсов в качестве переносчика второго первичного сигнала s2(t) таким образом, чтобы импульсы АИМ-сигнала v2(t) второго канала передавались в те промежутки времени, когда цепь свободна от передачи импульсов первого канала (см. рис. 5.3, б). Канальные импульсы третьего (см. рис. 5.3, в) и других каналов также должны быть сдвинуты во времени относительно импульсов первых двух каналов и друг друга. Групповой сигнал v(t) получается после объединения канальных сигналов v,(t), v2(t),..., vN(t) (рис. 5.3, г). Получить канальные АИМ-сигналы практически очень легко. Роль АИМ-модуляторов могут выполнять электронные ключи (ЭК) (рис. 5.4), на которые нужно подать первичные сигналы. Ключи управляются импульсными переносчиками. Работа АИМ-модуляторов сводится к следующему: импульсы переносчиков поочередно открывают ключи, на выходах которых появляются первичные сигналы.
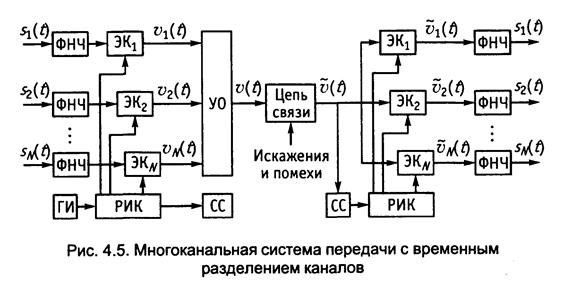
Нужно позаботиться лишь о том, чтобы последовательности импульсов, подаваемые на ключи ЭК, были сдвинуты во времени относительно друг друга (рис. 4.6). Эту задачу (см. рис. 4.5) выполняет распределитель импульсов каналов (РИК), управляемый генератором импульсов (ГИ). Таким образом, импульсы каждого канала, несущие в своей амплитуде информацию о первичном сигнале, передаются по цепи только в определенные промежутки времени. Разделение каналов на приеме (т.е. выделение канальных импульсов из группового сигнала) можно легко осуществить также с помощью ЭК, которые должны работать синхронно и синфазно с ключами передающей части. Другими словами, ключ каждого канала должен открываться тогда, когда по цепи приходят импульсы данного канала, и быть закрытым во время прихода импульсов других каналов. Это достигается с помощью управления ключами ЭК импульсными последовательностями (такими же, как и на передаче), вырабатываемыми в РИК приемной части и синхронизированными с импульсами передатчика с помощью схемы синхронизации СС (см. рис. 4.5). Канальные импульсы 17,(0, v2it),.... vN(t) с помощью УО объединяются в групповой сигнал v(t).
Описанные системы передачи (см. рис. 4.5), в которых канальные сигналы передаются по цепи в неперекрывающиеся промежутки времени, называются системами передачи с временном разделением каналов (ВРК).
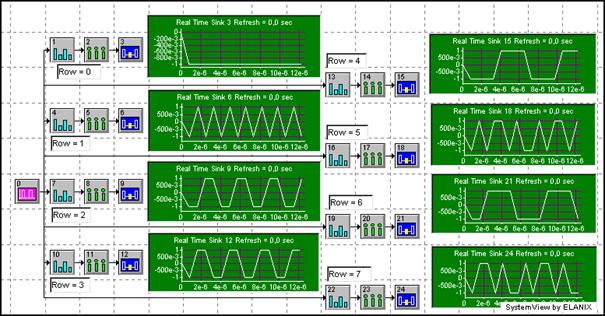
5.4.1 Соберите схему многоканальной системы передачи с временным разделением (рисунок 5.2).
Рисунок 5.2
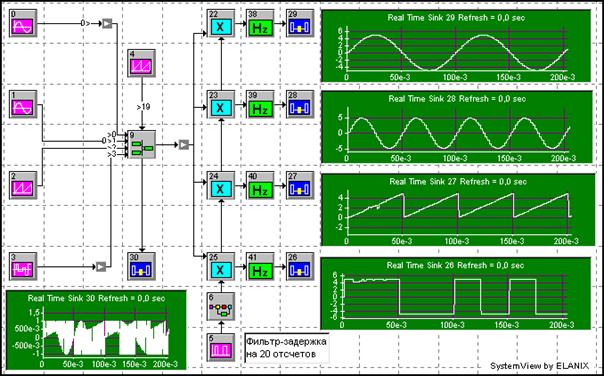
5.3.6 Запустите систему на выполнение и проанализируйте полученные результаты. Для полного восстановления принятых сигналов необходимо выполнить их фильтрацию. Выберите тип необходимых фильтров и рассчитайте их параметры. Пример выполнения системы с фильтрами типа Comm приведен на рисунке 5.3.
Рисунок 5.3
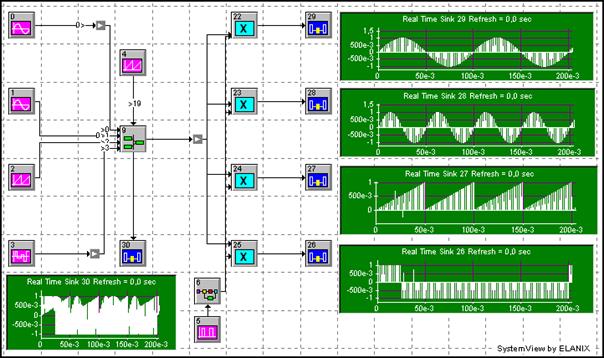
Пример системы с использованием фильтра-задержки на 20 отсчетов приведен на рисунке 5.4.
Рисунок 5.4
5.3.6 На рисунке 5.5 показана схема приемного распределителя каналов (модуль 6).
Рисунок 5.5
Примечание. Приемный распределитель каналов собирается в основном окне и затем преобразуется в мета-систему. Входной модуль 8 и выходные модули 15, 17, 19 и 21 вводятся в мета-систему автоматически.
5.4 Выводы
5.4.1 Сделайте анализ по полученным результатам.
5.5 Контрольные вопросы
5.5.1 Назовите способы разделения каналов по частоте - FDMA (Frequency Division Multiple Access). 5.5.2 Назовите методы множественного доступа с временным разделением каналов TDMA (Time Division Multiple Access,). 5.5.3 Схема распределения частотных поддиапазонов по ячейкам сотовой сети а) для FDMA; б) для TDMA. 5.5.4 Объясните функциональную схему простейшей системы многоканальной связи с разделением каналов по частоте. 5.5.5 Объясните функциональную схему простейшей системы многоканальной связи с разделением каналов повремени.
Лабораторная работа №6
Исследование кодового разделения каналов
Цель работы
Изучение метода кодового разделения каналов
6.2 Предварительная подготовка Изучить принципы построения устройств кодового разделения каналов Для разделения сигналов могут использоваться не только такие очевидные признаки, как частота, время и фаза. Наиболее общим признаком является форма сигналов. Различающиеся по форме сигналы могут передаваться одновременно и иметь перекрывающиеся частотные спектры, и тем не менее такие сигналы можно разделить, если выполняется условие их ортогональности. Пусть в качестве переносчиков выбраны импульсы, последовательность которых образует, например, степенной ряд. В предположении, что информация содержится в коэффициентах с1,с2,..., для группового сигнала запишем s(t)=c11+c2t+...+cNtN-1. Члены ряда линейно независимы, и, следовательно, ни один из канальных сигналов cKtK-1 не может быть образован линейной суммой всех других сигналов. Это легко понять, обратив внимание на то, что многочлен от t может быть тождественно равен нулю только в том случае, когда все его коэффициенты равны нулю. В последние годы успешно развиваются цифровые методы разделения сигналов по их форме, в частности, в качестве переносчиков различных каналов используются дискретные ортогональные последовательности в виде функций Уолша, Радемахера и другие. Широкое развитие методов разделения по форме сигналов привело к созданию систем связи с разделением "почти ортогональных" сигналов, представляющих собой псевдослучайные последовательности, корреляционные функции и энергетические спектры которых близки к аналогичным характеристикам "ограниченного" белого шума. Такие сигналы называют шумоподобными (ШПС). Основной характеристикой ШПС является база сигнала В, определяемая как произведение ширины его спектра F на его длительность Т. База ШПС характеризует расширение его спектра по сравнению со спектром исходного сигнала. Расширение спектра частот может осуществляться умножением исходного сигнала (например, двухчастотной ЧМ) на псевдослучайную последовательность (ПСП) с периодом повторения Т (равным длительности интервала модуляции исходного ЧМ-сигнала), включающую N бит ПСП длительностью 0 каждый. В этом случае база ШПС численно равна количеству элементов ПСП В=Т/ 0=N. Поскольку параметры сигнала ШПС (значения бит ПСП - два набора значений в случае двухчастотной ЧМ) известны, то прием ШПС может производится приемниками, рассчитанными на прием сигналов с известными параметрами. В результате отношение сигнал/шум на выходе приемника улучшается в В раз по отношению ко входу. В зарубежных источниках для обозначения данного принципа применяется понятие кодового разделения каналов Code Division Multiply Access (CDMA).
6.3 Рабочее задание 6.3.1 Изучите временные характеристики псевдослучайных последовательностей. Для этого соберите простейшую схему с генератором функций Уолша (рисунок 6.1).
Рисунок 6.1
Используя материалы, приведенные в приложении, объясните принципы формирования псевдослучайных последовательностей. Заполните таблицу для функций Уолша [8´8]. Используя материалы, приведенные в приложении и [1], сделать выводы о свойствах ПСП.
6.3.2 Исследуйте автокорреляционные и взаимно-корреляционные функции для псевдослучайных последовательностей порядка 8 и 64. Номера строк ПСП (от нуля до 63) задаются преподавателем. Соберите схему, приведенную на рисунке 6.2.
Таблица 6.1
Рисунок 6.2
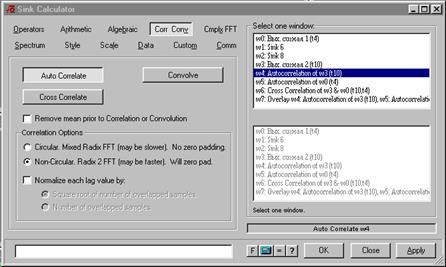
Запустите схему на выполнение и, затем, перейдите в окно анализа. Постройте автокорреляционные и взаимно-корреляционную функции для выходных сигналов модулей 3 и 5 (рисунок 6.2). Для этого в окне анализа вызовите калькулятор SystemView и перейдите на вкладку Corr Conv (рисунок 5.3). В диалоговом окне калькулятора SystemView последовательно выберите опцию AutoCorrelate для окон w0 Вых. Сигнал 1 и w4 Вых. Сигнал 2, а затем - опцию Cross Correlate для этих же окон. Для сравнительного анализа объедините построенные графики в один с помощью опции Operators/Overlay Plot. Сравните полученные графики и сделайте вывод о возможности использования ПСП в качестве признака для кодового разделения каналов.
Рисунок 6.3
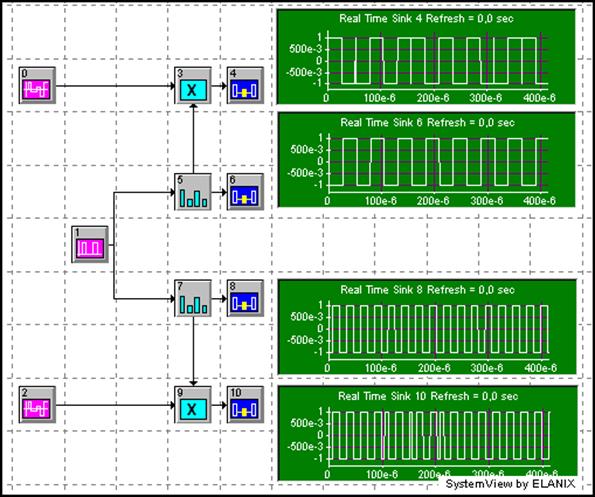
6.3.3 Соберите схему кодового разделения каналов (рисунок 6.4). Модулятор выполняется на перемножающем устройстве (модуль 3). На его первый вход подается сигнал от источника (модуль 0). На второй вход перемножителя 3 поступает псевдослучайная последовательность (ПСП) от генератора функций Уолша (модуль 4). Сигнал с расширенным спектром с выхода модулятора 3 выдается в сумматор 7 и далее в канал связи. На приемной стороне сигнал из канала связи поступает на первый вход демодулятора (модуль 9), на второй вход которого поступает ПСП с выхода генератора функций Уолша (модуль 11). Окончательное восстановление демодулированного сигнала выполняется с помощью интегратора со сбросом (модуль 12). Интегратор 12 включает дополнительное ключевое устройство, которое преобразует проинтегрированный сигнал в цифровую форму. Для сравнения в схему включен интегратор со сбросом (модуль 17), работающий в режиме непрерывного интегрирования. Более подробные сведения о работе устройства можно получить из приложения, а также работы [1`][1].
Рисунок 6.4
При сборке схемы модули 1, 5 и 6 в схему не включаются и будут использованы позже. Запустите схему на выполнение и изучите полученные временные диаграммы.
Рисунок 6.5
6.3.4 Дополните схему элементами передатчика второго канала (модули 1, 5 и 6). Запустите схему на выполнение вновь. Теперь в канале связи будет иметься два различных сигнала с расширенным спектром. Сравните временные диаграммы в канале связи, на выходе демодулятора и на выходе интегратора. Сделайте вывод о выполняемых ими функциях. При необходимости используйте математические выкладки из приложения и [1]. 6.3.5 Дополните схему элементами приемника второго канала (рисунок 6.5). Убедитесь, что на выходе системы отсутствует влияние между каналами. Для этого установите значение амплитуды выходного сигнала источника сообщений (модуль 0) равным нулю. Запустите систему и просмотрите временные диаграммы выходных сигналов. Теперь восстановите амплитуду сигнала на выходе модуля 0 и установите амплитуду сигнала на выходе модуля 1 равной нулю. Запустите систему вновь и просмотрите временные диаграммы выходных сигналов.
6.3.6 Теперь проверьте влияние мощности передаваемых сигналов на другие каналы. Для этого по очереди изменяйте значения амплитуды источников сообщений (модули 0 и 1) от 0 до 10 Вольт, ступенями через 2 Вольт.
6.3 Выводы Сделайте выводы о влиянии мощности передаваемых сигналов на другие каналы.
6.4 Контрольные вопросы
6.4.1 Назначение множественный доступ с кодовым разделением каналов. 6.4.2 Почему используются ортогональные коды в системах CDMA. 6.4.3 Что позволяет модуляция с расширением спектра и методы CDMA. 6.4.4 Назначение коррелятора. 6.4.5 Поясните принцип работы системы сотовой связи с кодовым разделением каналов.
Список литературы
1 Скляр Б. Цифровая связь. Теоретические основы и практическое применение: 2-е изд. /Пер. с англ.- М.: Издательский дом «Вильямс», 2003. - 1104 с. 2 Разевиг В.Д., Лаврентьев Г.В., Златин И.Л. SystemView - средство системного проектирования радиоэлектронных устройств / Под ред. В. Д. Разевига. - Горячая линия-Телеком, 2002. - 352 с. 3 Сергиенко А.Б. Цифровая обработка сигналов.- СПб.: Питер, 2002. - 608 с. 4 Загидуллин Р.Ш, Карутин С.Н, Стешенко В.Б. SystemView-системотехническое моделирование устройств обработки сигналов.-М:.Горячая линия.-2005г.-294стр.
Содержание
Дополнительный план 2008г., поз.
Адильжан Джакипбекович Джангозин Катипа Сламбаевна Чежимбаева Альмира Далелханкызы Мухамеджанова
ТЕОРИЯ ИНФОРМАЦИИ
Методические указания к выполнению лабораторных работ (для студентов очной формы обучения специальности 050704 - Вычислительная техника и программное обеспечение)
Редактор Курманбаева Т.С.
Подписано в печать Формат 60х84 Тираж экз. Бумага типографская №1 Объем уч.-изд.л Заказ Цена тг
Копировально-множительное бюро Некоммерческого акционерного общества «Алматинский институт энергетики и связи» 050013, г. Алматы, ул. Байтурсынова, 126
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2017-01-25; просмотров: 692; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.129.69.58 (0.012 с.) |