
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Методика выполнения экспериментовСодержание книги
Поиск на нашем сайте
Практическое занятие №1 Обработка экспериментальных данных (4 часа) Целью практического занятия является приобретение навыков измерений и обработки результатов измерений. Рассматривается процесс лазерной обрабтки.В качестве источника энергии использовали газовый СО2 – лазер.
Методика выполнения экспериментов Переменными параметрами обработки являются: 1-мощность излучения; 2 – диаметр фокального пятна; 3 - скорость движения координатного стола (скорость обработки). Параметры 1и2 устанавливали в процессе предварительной настройки; параметр 3 задавали с пульта управления системы ЧПУ. О качестве упрочнения судили по изменению твердости, измеренной после прохода лазерного.луча. Измерения твердости проводили на приборе Роквелла. Предположительно, твердость зависит от температуры нагрева.
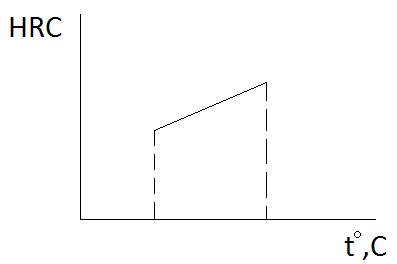
Рис.1. зависимость твердости от температуры фокального пятна y - HRC – твердость; x - tо C – температура фокального пятна. Опытные образцы
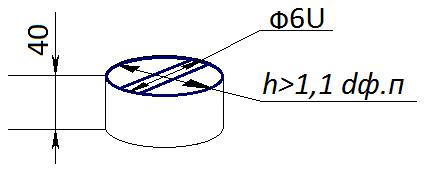
Рис.2. Форма и размеры опытных образцов Материал: 40Х13, 14Х17Н2 ……
Рис.3. Фокусировка лазерного луча Используем многомодовый лазер.
Рис.4. Распределение мощности в пределах фокального пятна Измерение температуры Поскольку измерение температуры при лазерной обработке, протекающей в короткий отрезок времени – задача трудноразрешимая, установим зависимость твердости от другого параметра, который связан с температурой. HRC(t)=>HRC(τ), τ - время лазерного воздействия.
V- скорость координатного перемещения. Измерение скорости Для этого определяем дискрету шагового двигателя, т.е. перемещение стола на один импульс ШД. Техника и технология ЛТУ Настраиваем лазер на max плотность мощности и делаем первый проход от оси образца. Далее снижаем скорость, делаем второй проход, но при этом смещаем стол в перпендикулярном направлении на расстояние, несколько превышающее диаметр фокального пятна (h > 1,1dф.п.). Результаты измерений Таблица 1
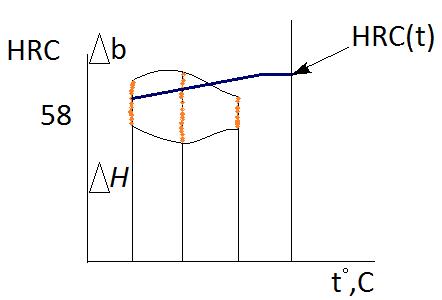
Результаты измерений из табл.1 переносим на график (рис5).
Рис.5. Распределение результатов измерений Обработка результатов измерений состоит в том, что для фиксированного значения скорости (температуры) принимают во внимание все полученные результаты измерений твердости, определяют наиболее вероятное значение как среднее арифметическое, о также такие статистические характеристики как доверительный интервал, доверительная вероятность и др. МЕТРОЛОГИЧЕСКОЕ ОБЕСПЕЧЕНИЕ АВТОМАТИЧЕСКИХ И АВТОМАТИЗИРОВАННЫХ СИСТЕМ УПРАВЛЕНИЯ (МИиОО АСУ ТП)
1-й семестр Модуль №1
Введение
Цели и задачи курса Целью изучения курса МИиООАСУ ТП является формирование у магистрантов по направлению «Автоматизация технологических процессов и производств» системных знаний, навыков и умений по метрологическому, информационному и организационному обеспечению современных АСУ ТП, общекультурных – ОК-1,ОК-4 и профессиональных ПК-1,3, 14 и 19 компетенций:
ОК-1 – способность совершенствовать и развивать свой интеллектуальный и общекультурный уровень (ОК-1); ОК-4 – способность использовать на практике навыки и умения в организации научно-исследовательских, проектных и производственных работ, в управлении коллективом, влиять на формирование целей команды, воздействовать на её социально-психологический климат в нужном для достижения целей направлении, оценивать качество результатов деятельности; ПК-1 – способность разрабатывать технические задания на модернизацию и автоматизацию действующих производственных и технологических процессов и производств, технических средств и систем автоматизации, управления, контроля, диагностики и испытаний; новые виды продукции, автоматизированные и автоматические технологии её производства, средства и системы автоматизации, управления процессами, жизненным циклом продукции и её качеством; ПК-3 – способность составлять описания принципов действия и устройств, проектируемых технических средств и систем автоматизации, управления, контроля, диагностики технологических процессов и производств; Пк-14 – способность выполнять анализ состояния и динамики функционирования средств и систем автоматизации, контроля, диагностики, испытаний и управления качеством продукции, метрологического и нормативного обеспечения производства, стандартизации и сертификации с применением надлежащих современных методов и средств анализа; Рис.1. Нормативная база метрологического обеспечения Таким образом, из рис. 1 следует вывод, что обеспечение единства измерений остается под контролем государства.
Виды метрологических работ ИК-Канал измерений
Рис. 2. Регламент метрологических работ Отсюда следует, что регламент метрологических работ определяется этапом создания и использования АСУ ТП. К нормированию правильного выполнения технологической документации приведены положения о сертификации, утверждении типа средства измерений, разрознены понятия калибровки ИК, определено, как осуществлять метрологический надзор за выпуском, состоянием и применением измерительных систем, а также даны ссылки на основные нормативные документы. ИК, применяемые в сфере государственного метрологического контроля и надзора должны проходить процедуру утверждения типа средства измерения. В процессе опытной эксплуатации эти каналы подлежат опытной поверке, а в процессе промышленной эксплуатации они должны подвергаться периодической поверке. Потоки информации Эта информация возникает и обрабатывается в режиме реального времени. Архивная информация заносится в память машин и обрабатывается по мере необходимости. В то же время информацию, обработанную в АСУ, делят на текущую - оперативную, сменную, суточную, месячную. N – число измерений, δxi – поправка к измеренному значению параметра. Полученная информация сравнивается с заданными значениями, каждое из которых при этом имеет свой доверительный интервал. В том случае, когда среднее арифметическое значение выходит за пределы этого интервала, вырабатывается корректирующее воздействие. Источники погрешностей Результаты определения оперативных и архивных ТЭП в АСУТП всегда представлены с какой-то погрешностью, обусловленной различными причинами. Рассмотрим источники этих погрешностей: Механические воздействия. Различают также динамическую погрешность, которая обусловлена динамическими свойствами средств измерений. Любое средство измерения является частотным фильтром. В результате взаимодействия такого фильтра с измеряемым параметром появляется динамическая погрешность. На результаты измерений оказывают влияние и методические погрешности.
Основы теории вероятностей Случайные события Если P (A) не зависит от того, осуществилось ли событие B, то такие события будем называть независимыми, в противном случае будем называть их зависимыми. В этом случае вероятность осуществления события A называется безусловной вероятностью. P (A/B) – условие вероятности. Если события A и B независимы, то имеет место: P (A/B)= P (A/ Степень зависимости событий оценивают следующими величинами: Коэффициент регрессии: ρ (A/B)=P (A/B)- P (A/ Коэффициент регрессии события B относительно события A: ρ (B/A)=P (B/A)- P (B/ Ā) Коэффициент корреляции событий A и B: r(A/B)= Если в результате опыта непременно должно произойти хотя бы одно из событий A1,A2,…An, то такие события называют полной группой событий. Сложные события могут быть представлены в виде комбинации других событий, называемых элементарными. Наиболее простые комбинации, к которым сводятся и другие комбинации, называются суммой и произведением событий. Суммой событий A1,A2,…An называется сложное событие, состоящее в появлении хотя бы одного события Ai. Произведение событий – это сложное событие, состоящее в появлении всех событий Ai. Сумма событий называется объединением и обозначается:
Произведение событий называют пересечением или совмещением:
Если события Ai несовместны, то вероятность их суммы равна сумме вероятностей, то есть:
Случайные величины Рис. 4.Функции распределения случайной величины Функция распределения является полной характеристикой случайной величины. В числовых расчетах необходимо указывать параметры, характеризующие отдельные стороны случайной величины, к ним относятся медиана, мода, математическое ожидание, дисперсия.
Медиана – это такое значение случайной величины X, при котором
Для непрерывной случайной величины:
Или
Рис.5. Антимодальное распределение Если фиксируется min, то такое распределение называется антимодальным (рис.5). Статистические оценки Статистические оценки – это итог обработки результатов измерений. В силу случайности выборки ее характеристики являются случайными величинами, отличающимися от числовых характеристик генеральной совокупности. Статистические оценки являются функциями результатов наблюдений и могут служить лишь приближенными оценками соответствующих числовых характеристик теоретического распределения генеральной совокупности. Случайные функции Модуль № 2 Погрешности измерений Классификация погрешностей На результат измерения кроме самой измеряемой величины влияют многие факторы, поэтому результат любого измерения, кроме истинного значения измеряемой величины, всегда содержит и погрешность измерения как объективно существующую реальность. Систематическая – составляющая погрешности измерения, которая остается постоянной или закономерно изменяется при повторных измерениях одной и той же величины. В некоторых случаях систематическую ошибку можно исключить путем внесения поправки. Случайная – составляющая, изменяющаяся случайно при повторных измерениях. Определить случайную ошибку чрезвычайно трудно. Для описания случайной погрешности необходимо использовать математический аппарат теории вероятности. Рис. 7. Полоса погрешностей и аддитивная относительная погрешность Пример: измерение коэффициента усиления транзистора. Величина Причины возникновения погрешностей СИ По причинам возникновения погрешности средств измерения делят на 3 группы: Погрешности, обусловленные качеством изготовления и градуировкой. При градуировке получают ряд точек, по которым проводят плавную кривую, принимаемую за характеристику преобразований. Пример: капилляр градусника не одинаков по высоте, а подъем определяется объемом расширения ртути. Причиной погрешности могут быть шумы, наводки, блуждающие токи. Разность между погрешностью в динамическом режиме и его статической погрешностью называется динамической погрешностью средств измерения. Эта погрешность зависит от частных свойств измеряемой величины и динамических свойств. Рис.8. зависимость твердости от температуры фокального пятна y - HRC – твердость; x - tо C – температура фокального пятна. Опытные образцы
Рис.9. Форма и размеры опытных образцов Материал: 40Х13, 14Х17Н2 ……
Рис.10. Фокусировка лазерного луча Рис.11. Распределение мощности в пределах фокального пятна Измерение температуры Поскольку измерение температуры при лазерной обработке, протекающей в короткий отрезок времени – задача трудноразрешимая, установим зависимость твердости от другого параметра, который связан с температурой. HRC(t)=>HRC(τ), τ - время лазерного воздействия.
Измерение скорости Техника и технология ЛТУ Настраиваем лазер на max плотность мощности и делаем первый проход от оси образца. Далее снижаем скорость, делаем второй проход, но при этом смещаем стол в перпендикулярном направлении на расстояние, несколько превышающее диаметр фокального пятна (h > 1,1dф.п.). Результаты измерений Таблица 1
Результаты измерений из табл.1 переносим на график (рис.12).
Рис.12. Распределение результатов измерений Обработка результатов измерений состоит в том, что для фиксированного значения скорости (температуры) принимают во внимание все полученные результаты измерений твердости, определяют наиболее вероятное значение как среднее арифметическое, о также такие статистические характеристики как доверительный интервал, доверительная вероятность и др. Завершающими этапом является анализ полученной зависимости (почему твердость падает,/повышается…). Рис.13. Определение оптимальной точности измерений Анализ характера изменения зависимостей Р1 и Р2 в зависимости от точностиизмерений показывает, что в каждом конкретном случае существует оптимальное значение точности, хотя, с точки зрения, прогресса и развития следует стремиться к постоянному повышению точности измерений.
Измерительные системы
Источником информации в АСУ ТП могут быть измерительные системы.
Рис.15. Схема измерительной системы
Система Датчик → Преобразователь → Устройство отображения. Передаточная функция G
Передаточная функция измерительной системы определяется как произведение передаточной функций всех элементов, входящих в систему.
Программируемые приборы
Существует понятие простой прибор. Если прибор выполняет возложенные на него функции во взаимодействии с процессором, то это - программируемый прибор. В этом случае ЭВМ берет на себя функцию сбора информации, хранения, обработки и использования этой информации. Если компьютер в автономном режиме осуществляет расчеты и анализ метрологических характеристик, определять случайные и систематические погрешности и с помощью специальных программ устанавливать наиболее вероятные и достоверные значения измеряемых величин, то в этом случае речь идет о виртуальных приборах. Затраты на создание виртуальных приборов значительны, но, как показывает опыт предприятий повышение точности при этом достигается при одновременном снижении затрат на измерения по сравнению с теми затратами, которые связаны с применением более точных, но и более дорогих приборов процесс Процесс нанесения меток на шкалу прибора принято называть калибровкой. Основными стандартами при калибровке являются первичные эталоны.
Семь первичных эталонов ИО Существует понятие о семи первичных эталонах. 1. Масса, кг; 2. Длинна, м; 3. Время, с; 4. Ток, А; 5. Температура t=273,16 К; 6. Сила света, люкс; 7. Количество вещества, моль.
Уровни управления в АСУ ТП
Управление организуется по иерархическому принципу.
Уровни (ранги)
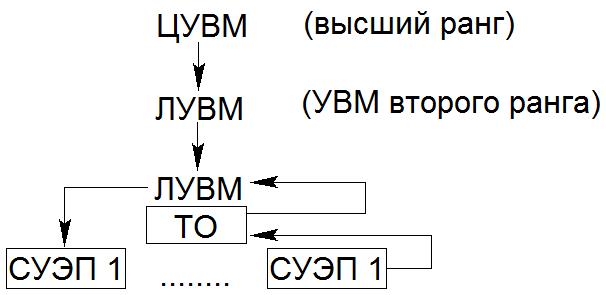
Рис.20. Структура и основные функции УВМ Здесь СУЭП – система управления электроприводом; ЦУВМ, ЛУВМ – центральная, локаоьная управляющая вычислительная машина соответственно Современная УВМ – это управляющее устройство, построенное на базе микро – ЭВМ и их комплексов. Управляющие устройства выполняются на дискретных элементах – это нижний уровень. Многие функции УВМ, связанные с вводом, выводом, отображением и преобразованием информации, реализуются на дискретных элементах, не входящих в микропроцессорные комплексы, таких как клавиатура, дискеты, диски, АЦП, ЦАП и т.д.
Рис.21. Структура УВМ в составе АСУ ТП ВЗУ – внешнее запоминающее устройство. ПБ – процессорный блок. УВВ – устройство ввода - вывода. МОТИ – модули обработки технологической информации. УСО – модули - устройства связи с объектом управления. В ПЗУ находится операционная система, инструментальное программное обеспечение для создания управляющих программ (УП), сами УП и сведения о технологическом объекте (ТО). УСО – преобразуют приходящие из процессора управляющие сигналы, чтобы согласовать их с входными цепями ТО, в то время как МОТИ преобразуют приходящие с ТО сигналы обратной связи (сигналы y) о параметрах ТО. Функции модулей УСО в составе ЛУВМ: · Усиление управляющих сигналов в соответствующем с преобразованием их по уровню и виду; · Преобразование кодов цифровых управляющих сигналов (параллельного сигнала в последовательный и т.п.); · ЦАП сигналов перед подачей их на аналоговые управляющие устройства; · Потенциальное разделение цепей управления. В ЛУВМ МОТИ должны совершить обратное преобразование сигналов обратной связи, идущих от управляющих устройств управления нижнего уровня и от технологического оборудования к виду, приемлемому для систем и сигналов, циркулирующих в УВМ. МОТИ производят: · Согласование уровней дискретных сигналов обратной связи сигналов в УВМ; · АЦП аналоговых сигналов обратной связи (последовательного и параллельного) · Потенциальное разделение цепей управления. Пример: дискретный управляющий сигнал уровня до 5В и до 5мА тока в переменном напряжении 110В и с током до 2А для включения контактора переменного тока. Устройство УСО и МОТИ выполняются в виде модульных конструкций, объединяющих в себе несколько каналов однотипных преобразователей таких как преобразователи уровней, аналого-цифровые преобразователей и д.р. Для управления, например, серво приводами используются микро процессоры. Технологический процесс, протекающий под управлением АСУТП, сопровождается информационными процессами (ИП). ИП включают: · Приёмы запоминания УП; · Приёмы запоминания текущей информации о параметрах техпроцессов и параметрах АСУТП · Формирование управляющих сигналов, воздействующих на ИМ РО и передачи их по каналам УСО;/ · Формирование информации о ходе техпроцессов и состояния АСУТП для верхнего уровня управления с целью передачи её по запросам ЦУВМ или оператору. Рассмотрим ИП как последовательность запланированных событий. События – это факт реализуемого производственного процесса. Реализованное событие назовём ИСХОДом. Описание происходящих событий назовём СООБЩЕНИЕМ.
Информационные процессы Информация ИНФОРМАЦИЯ – это процесс формирования пересылки и регистрации (запоминания) сообщений, то есть это зарегистрированная совокупность сообщений. Будем рассматривать не смысл, а количественную оценку информации. Объём записей существенно зависит от совокупности символов, применяемых для записи информации. Такая совокупность имеет вид основания системы исчисления – алфавит. Например, ISO 7 bit. Если в алфавите n символов, то с его помощью можно сформировать не более чем
Где М – число возможных вариантов события, сообщение о котором нам необходимо сформировать в зависимости от того, какой вариант состоится. Н – это величина, равная числу элементов сообщения, характеризует минимальный объём сообщения о том, что один из интересующих нас М вариантов изучаемого процесса действительно имеет место. Н – принято называть энтропией. Если результат предопределён, то М = 1, а Н = 0. Но предопределить результат произведения процесса не возможно. Все предполагаемые события равновероятны.
Вероятность
тогда
Здесь Н выступает как мера априфной неопределённости любого из исходов изучаемого процесса. То есть энтропия используется как мера неупорядоченности процесса. Если события не равновероятны, энтропия рассчитывается по формуле Шэннона:
При этом необходимо, чтобы изучаемые события составляли полную группу, когда
Величина Н является математическим ожиданием, то есть средним значением минимального объёма записей, которые необходимо сделать для фиксации факта реализации одного из М интересующих нас событий.
Кодирование информации Кодирование информации – это процесс формирования сообщений о событиях, составляющих управляемый техпроцесс. Два этапа кодирования: · Представление информации в дискретной форме (АЦП-ние);/ · Преобразование дискретных сигналов в наиболее подходящем для решения задач управления виде(преобразование кодов). Конкретный способ представления информации как системы соответствия между элементами сообщений и сигналами, их отображающими, называется кодом. Первоначально информация поступает от отдатчика или от ЗУ, ВЗУ и представляется в дискретной форме.
Рис.22.Преобразование информации Обозначения: ПК – преобразование кода; Д – датчик; ППр – первичный преобразователь; ГР – гальваническая развязка; УУ – устройство управления; ТО – технологический объект. По характеру взаимодействия с ППр сигналы датчиков подразделяются на дискретные и непрерывные (аналоговые). Если ППр выделяет в сигнале датчика только два (реже три) уровня, то такой сигнал считается дискретным. Пример: концевые выключатели. Если сигнал датчика дискретный, то ППр усиливает сигнал и осуществляет гальваническую развязку с УУ. Если сигнал непрерывный, ППр осуществляет АЦП-е. В этом случае ППр должен обеспечить достаточную разрешающую способность, соответствующую величине энтропии данного ТО. При использовании стрелочного прибора - это подходящая цена деления. РС – это шаг квантования по уровню. Ψ(x) - ступенчатая функция
Рис.24. Аналогово-цифровое преобразование Точность измерения зависит от скорости измерения.
Рис.25. Иллюстрация взаимосвязи точности и скорости измерения Частота отсчётов определяется шагом квантования по времени.
Приведенные формулы определяют требования к РС и быстродействию применяемых АЦП. Системы кодирования Различают десятичную и двоичную системы. Каждая система кодирования базируется на совокупности чётко определённых, специфических сигналов одной физической природы, называемых символами. Полная совокупность символов, на которой базируется система кодирования, составляет её алфавит. Конечная совокупность символов, входящих в принятую систему кодирования, называется кодовой комбинацией, словом или числом. Совокупность слов, правил их формирования и сочетания образуют разнообразные языки кодирования. В системах кодирования АСУ ТП применяются также совокупности символов как латинский и русский алфавиты, арабские цифры, знаки препинания, знаки математических операций и другие математические символы. Для представления чисел используют арифметические коды. Любое число может быть представлено:
где m, l – произвольные числа причём Произведение Q = am am-1 … a1 a0, a-1 … al. Пример: В АСУТП распространена двоичная система счисления. В двоичной системе для записи (арифметической) числовой информации применяется двоичный арифметический код n = 2. Используют две цифры 0 и 1. Рассмотрим запись двоичного числа, у которого m = 2, l = -2, a2 = 1, a1 = a0 = a-1 = 0, a-2 =1 Q = 1*22 + 0*21 + 0*20 + 0*2-1 + 0*2-2 = Опустив обозначение весов разрядов, получим запись данного числа в традиционном виде. Q = 100,01 Перевод целой части числа из десятичной в двоичную форму записи удобно производить методом деления. Число 25 25/2 = 12 (остаток 1) – младший разряд 12/2 = 6 (остаток 0) 6/2 = 3 (остаток 0) 3/2 = 1 (остаток 1) 1/2 = (остаток 1) – старший разряд. Q = 11001 = 1*24 + 1*23 + 0*22 + 0*21 + 1*20 Двоичные коды. Обработка информации процессором УВМ производится только в двоичных кодах. Два состояния (да - нет); (открыто - закрыто); (включено – выключено) и т.д. Обозначаются цифрой 0 или 1. Максимальное число возможных сообщений: M = nm
Сложность запоминающего устройства, пропорциональная произведению m*n, определяется из соотношения:
Продифференцировав по n и приравняв полученное производную к нулю, получим уравнение
Модуль №3 Задачи, решаемые АСУ ТП -Это повышение эффективности производства путем замены оператора аппаратными средствами и устройствами автоматического управления. Современные АСУ ТП - это совокупность аппаратных средств и их программного обеспечения, предназначенных для управления технологическими объектами, которые осуществляют автоматизацию сбора, накопления и переработки информации; формирует такие управляющие воздействия на исполнительное устройство, при выполнении которых работа управляемого объекта происходит в оптимальном режиме. Под технологическим объектом следует понимать совокупность технологического оборудования и производственного процесса.
Критерии оптимальности
Максимальный экономический эффект, охрана здоровья и окружающей среды. Условием оптимальности может быть названо сочетание САПР, АСТПП и АСУ ТП. Заключение Развитие АСУ ТП преследует цели повышения конкурентоспособности выпускаемой продукции за счет снижения затрат ресурсов и повышения качества. Применение АСУ ТП решает проблемы стабилизации и оптимизаии параметров технологических процессов, создает условия для совершенствования самих процессов и систем управления ими. Условиями дальнейшего развития являются разработка интеллектуальных алгоритмов управления, повышение быстродействия, повышение точности измерений и измерительных систем. Не мене важным условием является обеспечение функционирования АСУ ТП достоверной информацией, необходимой для принятия решений в режиме реального времени. Здесь решающее значение придается программно- технологическим комплексам. Организационное обеспечение АСУ ТП во многом зависит от специфики производства; оно изменяется в зависимости от конъюнктуры рынка, состояния экономики и др. факторов. Приобретение заявленных в данной учебной дисциплине общекультурных и профессиональных компетенций позволит будущим магистрам-инженерам на должном уровне решать весь комплекс вопросов и проблем, связанных с работой АСУ ТП.
Практическое занятие №1 Обработка экспериментальных данных (4 часа) Целью практического занятия является приобретение навыков измерений и обработки результатов измерений. Рассматривается процесс лазерной обрабтки.В качестве источника энергии использовали газовый СО2 – лазер.
Методика выполнения экспериментов Переменными параметрами обработки являются: 1-мощность излучения; 2 – диаметр фокального пятна; 3 - скорость движения координатного стола (скорость обработки). Параметры 1и2 устанавливали в процессе предварительной настройки; параметр 3 задавали с пульта управления системы ЧПУ.
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2017-01-25; просмотров: 167; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 52.14.219.203 (0.019 с.) |



 - распределение мощности.
- распределение мощности.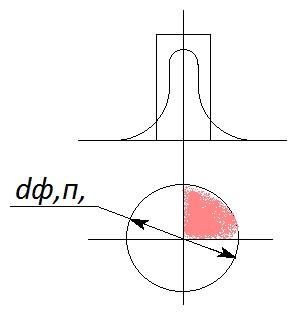
 ,
,

 )= P (A)
)= P (A)



 - дискретная величина;
- дискретная величина; - непрерывная величина;
- непрерывная величина; - смешанная величина.
- смешанная величина.

 .
. может быть постоянной во всем диапазоне измерения
может быть постоянной во всем диапазоне измерения  .
.




 различных сообщений. Тогда
различных сообщений. Тогда ,
, ,
,








 ;
;  - целое число, причём
- целое число, причём  ; n – целое число, основание системы исчисления (n >1).
; n – целое число, основание системы исчисления (n >1). называют разрядом закодированного числа, причём nj называют весом разряда, aj цифрой или цифровым значением разряда, а j – номером разряда. Если m = l, то закодированное число одноразрядное, состоит из одного разряда, а если все aj = 0, то Q = 0. Все разряды, у которых j < 0, входят в дробную часть закодированного числа, а остальные разряды составляют его целую часть. При записи чисел обычно опускают веса разрядов, а так же нули перед первой значащей цифрой целой части числа и после последней значащей цифры дробной части числа. Дробную часть от целой отделяют запятой или точкой. Запись числа приобретает вид:
называют разрядом закодированного числа, причём nj называют весом разряда, aj цифрой или цифровым значением разряда, а j – номером разряда. Если m = l, то закодированное число одноразрядное, состоит из одного разряда, а если все aj = 0, то Q = 0. Все разряды, у которых j < 0, входят в дробную часть закодированного числа, а остальные разряды составляют его целую часть. При записи чисел обычно опускают веса разрядов, а так же нули перед первой значащей цифрой целой части числа и после последней значащей цифры дробной части числа. Дробную часть от целой отделяют запятой или точкой. Запись числа приобретает вид:

 .
.





