Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Основные физические величины ИО
2.3 Терминология ИО
Взаимные помехи. Воспроизводимость показаний. Время реакции – время, в течение которого прибор выдаёт значение измеряемой величины. Гистерезис.
Рис.16.Графическая иллюстрация явления «гистерезиса»
Децибел - это соотношение двух значений - либо электрической, либо акустической мощности, выраженное в логарифмических единицах. Десятичный логарифм этого соотношения имеет размерность Белл. Децибел – это1/10 Белла. Число Белл – Если два напряжения V1 и V2 приложены к двум цепям с одинаковым импедансом, т.е.
то Тогда Аналогично для токов:
В Децибелах:
Импеданс – это сумма активного, индуктивного и емкостного сопротивления цепи.
Диапазон измерений - это интервал, внутри которого осуществляются измерение. Дрейф - смещение позиции. Дрейф нуля, как правило, проявляется в течение времени. Дрейф чувствительности - под влиянием внешней среды чувствительность меняется, поэтому нужно вносить поправку. Задержка - изменение показаний происходит не одновременно с изменением измеряемой величины. Истинное значение - это то значение, которое получено в данных условиях, когда выполняются все условия для получения минимальной погрешности. Мертвая зона - это диапазон значений измеряемой величины, в которых сигнал прибора не изменяется. Надежность - это вероятность нормального функционирования прибора в условиях, определенных для его применения.
Отношение: cигнал / шум
Погрешность линейности (нелинейности).
Рис.17. Графическая иллюстрация «нелинейности» Нелинейность – это разность между истинными и принятыми значениями измеряемой величины в предположении, что система измерения линейна.
Полоса пропускани.
Рис.18. Графическая иллюстрация «полосы пропускания»
Периодическая функция находится в диапазоне 3Дб. Погрешность квантования в ЦАП и АЦП возникает из-за шага квантования, который определяет величину квадрата наименьшего значения разряда.
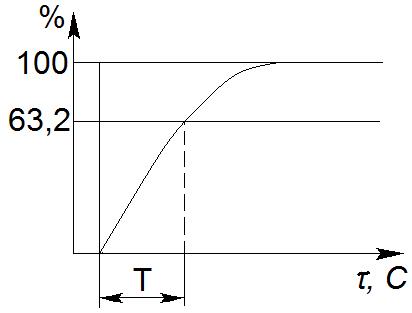
Постоянная времени.
Рис.19. Постоянная времени Разрешающая способность - дискриминация, это минимальное изменение измеряемой величины, которая приведет к различимому изменению на выходе в показаниях прибора.
Скорость нарастания выходного сигнала - это максимально возможная скорость. Смещение - это постоянная ошибка, которая существует во всем диапазоне измерения. Стабильность измерения - это повторяемость в течение определенного времени или в течение определенного числа раз. Сходимость - это степень разброса результатов измерений. Точность - это интервал, показывающий, на сколько могут быть неверными показания прибора. Чувствительность прибора - это отношение изменения показания прибора к изменению измеряемой величины. Шум квантования - добавляется к аналоговому сигналу из-за погрешности квантования. Точность системы. Обозначим выход датчика буквой θ1 θ1 = Gθi, где G – передаточная функция, θi – выход сигнала датчика. θ1 = θ1±δθi, G1 = G1±δG1. Выход датчика является входом для преобразователя. Поэтому передаточная функция преобразователя равна: G2 = G2±δG2 и т.д., тогда
θ0 – выходной сигнал измерительной системы, δθ0 – полная погрешность системы.
Относительная погрешность системы равна сумме относительной погрешности устройства отображения преобразователя и датчика. .
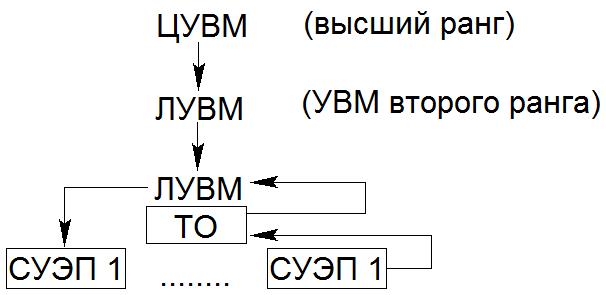
Уровни управления в АСУ ТП
Управление организуется по иерархическому принципу.
Уровни (ранги)
Рис.20. Структура и основные функции УВМ Здесь СУЭП – система управления электроприводом; ЦУВМ, ЛУВМ – центральная, локаоьная управляющая вычислительная машина соответственно Современная УВМ – это управляющее устройство, построенное на базе микро – ЭВМ и их комплексов. Управляющие устройства выполняются на дискретных элементах – это нижний уровень. Многие функции УВМ, связанные с вводом, выводом, отображением и преобразованием информации, реализуются на дискретных элементах, не входящих в микропроцессорные комплексы, таких как клавиатура, дискеты, диски, АЦП, ЦАП и т.д.
Рис.21. Структура УВМ в составе АСУ ТП ВЗУ – внешнее запоминающее устройство. ПБ – процессорный блок. УВВ – устройство ввода - вывода. МОТИ – модули обработки технологической информации.
УСО – модули - устройства связи с объектом управления. В ПЗУ находится операционная система, инструментальное программное обеспечение для создания управляющих программ (УП), сами УП и сведения о технологическом объекте (ТО). УСО – преобразуют приходящие из процессора управляющие сигналы, чтобы согласовать их с входными цепями ТО, в то время как МОТИ преобразуют приходящие с ТО сигналы обратной связи (сигналы y) о параметрах ТО. Функции модулей УСО в составе ЛУВМ: · Усиление управляющих сигналов в соответствующем с преобразованием их по уровню и виду; · Преобразование кодов цифровых управляющих сигналов (параллельного сигнала в последовательный и т.п.); · ЦАП сигналов перед подачей их на аналоговые управляющие устройства; · Потенциальное разделение цепей управления. В ЛУВМ МОТИ должны совершить обратное преобразование сигналов обратной связи, идущих от управляющих устройств управления нижнего уровня и от технологического оборудования к виду, приемлемому для систем и сигналов, циркулирующих в УВМ. МОТИ производят: · Согласование уровней дискретных сигналов обратной связи сигналов в УВМ; · АЦП аналоговых сигналов обратной связи (последовательного и параллельного) · Потенциальное разделение цепей управления. Пример: дискретный управляющий сигнал уровня до 5В и до 5мА тока в переменном напряжении 110В и с током до 2А для включения контактора переменного тока. Устройство УСО и МОТИ выполняются в виде модульных конструкций, объединяющих в себе несколько каналов однотипных преобразователей таких как преобразователи уровней, аналого-цифровые преобразователей и д.р. Для управления, например, серво приводами используются микро процессоры. Технологический процесс, протекающий под управлением АСУТП, сопровождается информационными процессами (ИП). ИП включают: · Приёмы запоминания УП; · Приёмы запоминания текущей информации о параметрах техпроцессов и параметрах АСУТП · Формирование управляющих сигналов, воздействующих на ИМ РО и передачи их по каналам УСО;/ · Формирование информации о ходе техпроцессов и состояния АСУТП для верхнего уровня управления с целью передачи её по запросам ЦУВМ или оператору. Рассмотрим ИП как последовательность запланированных событий. События – это факт реализуемого производственного процесса. Реализованное событие назовём ИСХОДом. Описание происходящих событий назовём СООБЩЕНИЕМ.
Информационные процессы Информация ИНФОРМАЦИЯ – это процесс формирования пересылки и регистрации (запоминания) сообщений, то есть это зарегистрированная совокупность сообщений. Будем рассматривать не смысл, а количественную оценку информации. Объём записей существенно зависит от совокупности символов, применяемых для записи информации. Такая совокупность имеет вид основания системы исчисления – алфавит. Например, ISO 7 bit. Если в алфавите n символов, то с его помощью можно сформировать не более чем
Где М – число возможных вариантов события, сообщение о котором нам необходимо сформировать в зависимости от того, какой вариант состоится. Н – это величина, равная числу элементов сообщения, характеризует минимальный объём сообщения о том, что один из интересующих нас М вариантов изучаемого процесса действительно имеет место.
Н – принято называть энтропией. Если результат предопределён, то М = 1, а Н = 0. Но предопределить результат произведения процесса не возможно. Все предполагаемые события равновероятны.
Вероятность
тогда
Здесь Н выступает как мера априфной неопределённости любого из исходов изучаемого процесса. То есть энтропия используется как мера неупорядоченности процесса. Если события не равновероятны, энтропия рассчитывается по формуле Шэннона:
При этом необходимо, чтобы изучаемые события составляли полную группу, когда
Величина Н является математическим ожиданием, то есть средним значением минимального объёма записей, которые необходимо сделать для фиксации факта реализации одного из М интересующих нас событий.
|
|||||||
|
|
Последнее изменение этой страницы: 2017-01-25; просмотров: 245; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.117.158.47 (0.023 с.) |


 .
. .
. 
 ;
; ,
, .
. .
. .
. .
. , где
, где – уровень сигнала,
– уровень сигнала, – уровень внутреннего шума системы.
– уровень внутреннего шума системы.


 .
.

 различных сообщений. Тогда
различных сообщений. Тогда ,
, ,
,