Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Синхронные двигатели и синхронные компенсаторыСодержание книги
Похожие статьи вашей тематики
Поиск на нашем сайте
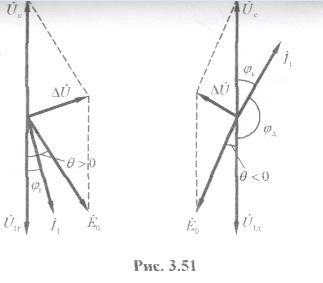
Особенности двигательного режима в синхронной машине Индуктор синхронного двигателя вращается с той же частотой, что и магнитное поле. Вращающееся магнитное поле увлекает за собой индуктор и он приходит во вращение. При нагрузке синхронного двигателя на индуктор воздействует тормозной момент созданный рабочим механизмом. Поэтому индуктор продолжая вращаться синхронно с магнитным полем смещается относительно оси этого поля на угол θ (рис. 3.41 методичка). Чем больше нагрузка на валу двигателя, тем больше угол θ, но в отличии от генератора, в котором индуктор опережает результирующий магнитный поток, в двигателе индуктор отстает от результирующего поля. Поэтому для двигателей этот угол θ принимается отрицательным. Рассмотрим два режима работы синхронной машины для генератора и для двигателя. Векторные диаграммы для этих режимов показаны на (рис. 3.51 методичка). Левый – генераторный режим, правый – двигательный режим.
В первом случае, как видно из векторной диаграммы, вектор ЭДС Е0 опережает вектор напряжения генератора U1г, величина которого определяется результирующим магнитным потоком. Во втором случае, вектор ЭДС Е0 отстает от вектора напряжения U1д. Тогда для генераторного режима угол θ положительный, а для второго случая вектор отрицательный. Под напряжением U1г и U1д понимают напряжение на выводах машины, уравновешивающие напряжение сети. Согласно рисунка (рис. 3.51 правый, методичка) в соответствии с изменением фазы напряжение ∆U по сравнению с генераторным режимом изменяется и фаза тока якоря I1. Тогда активная мощность двигателя отдаваемого в сеть будет описана выражением 𝑃𝑔 = 𝑚𝑈1𝑔𝐼1 cos 𝜑𝑔 < 0 (94). И эта мощность будет отрицательной. А активная мощность, потребляемая из сети будет положительная 𝑃𝑔 = 𝑚𝑈𝑐𝐼1 cos 𝜑𝑐 > 0 (95). Рассматривая данные выражения для мощности, видно, что для двигательного режима при θ меньше нуля, синхронная машина работает в двигательном режиме. При построении векторных диаграмм синхронного двигателя принято фазу тока отсчитывать по отношению к вектору напряжения Uсети. Построении векторных диаграмм синхронного двигателя при известных значениях напряжения двигателя и тока якоря и угла сдвига между ними производится точно так же, как и для генераторного режима (рис. 3.52 левая часть векторной диаграммы, методичка) 𝐸0 = 𝑈1𝑔 + 𝑗𝐼1𝑥𝛿1 + 𝑗𝐼1𝑑𝑥𝑎𝑑 + 𝑗𝐼1𝑞𝑥𝑎𝑞 (96).
Если при построении векторной диаграммы известно напряжение сети, то тогда векторная диаграмма строится согласно следующего выражения 𝐸0 = 𝑈𝑐 − 𝑗𝐼1𝑋𝛿1 − 𝑗𝐼1𝑑𝑋𝑎𝑑 − 𝑗𝐼1𝑞𝑋𝑎𝑞 (97), что видно на (рис. 3.5 правая часть, методичка). Данная векторная диаграмма построена для опережающего тока якоря I1. На векторной диаграмме показаны вектора МДС Fв, а также составляющие МДС якоря Fad, Faq, которые отложены по составляющим тока якоря I1d, I1q. Видно, что МДС Fad направлена встречно вектору МДС Fв. Это говорит о том, что в двигательном режиме при опережающем токе якоря I1, действует продольная размагничивающая реакция якоря (вектор Fad направлен встречно к вектору Fв). Аналогично можно показать, что при отстающем токе якоря будет действовать продольная подмагничивающая реакция якоря. Но оказывается, рассматривая действия реакции якоря в синхронном генераторе было обратное данным рассуждениям, которые мы отметили для двигательного режима. Однако это расхождение вызвано неразличием в физических явлениях присущих генератору и двигателю. А различным отсчетам фазы тока якоря в двигателе и в генераторе: 1) В двигателе фаза тока определяется по отношению к напряжению сети. 2) В генераторе по отношению к собственному напряжению, находящемуся в противофазе с напряжением сети. Поэтому опережающему току в двигательном режиме соответствует отстающий ток в генераторном режиме. Энергетическая диаграмма активной мощности синхронного двигателя Преобразование активной мощности покажем с помощью энергетической диаграммы (рис. 3.53 методичка). Объясним ее.
Из сети синхронный двигатель потребляет активную мощность Р1. Часть этой мощности расходуется на покрытие электрических потерь в обмотке якоря Рэ1. Другая часть этой мощности расходуется на покрытие магнитных потерь в стали синхронной машины (потери на гестерезис и вихревые токи).
В настоящее время обмотка возбуждения синхронного двигателя получает питание от сети, через регулируемый теристорный выпрямитель. Оставшаяся мощность — это электромагнитная мощность, которая передается электромагнитным полем на индуктор. Эта электромагнитная мощность преобразуется в механическую мощность, развиваемую индуктором. Часть этой мощности идет на компенсацию механических потерь ∆Рмех. Другая часть этой мощности идет на компенсацию добавочных потерь ∆Рдоб. Оставшаяся мощность Р2 это полезная механическая мощность, которая передается с валов синхронного двигателя на вал рабочего механизма. Угловые и V-образные характеристики синхронного двигателя. Для синхронного двигателя запишем следующее выражение, для активной мощности 𝑃 = 𝑃′ + 𝑃′′ = 𝑚 𝑈1𝐸0 sin 𝜃 + 𝑚𝑈12 (1 − 1 )sin 2𝜃 (98) – для явнополюсной. Для неявнополюсной – 𝑥𝑑 2 𝑥𝑞 𝑥𝑑 𝑃 = 𝑚 𝑈1𝐸0 sin 𝜃 (99). Запишем аналитическое выражение для электромагнитного момента хсинх 𝑀 = 𝑀′ + 𝑀′′ = 𝑚 𝑈1𝐸0 sin𝜃 + 𝑚𝑈12 (1 − 1 ) sin2𝜃 (100) – для явнополюсной, 𝑀 = 𝑚𝑈1𝐸0 sin𝜃 (101) – для Ω1𝑥𝑑 2Ω1 𝑥𝑞 𝑥𝑑 Ω1𝑥синх неявнополюсной. В синхронном двигателе электромагнитный момент М направлен в сторону вращения индуктора, тогда как в генераторе этот момент направлен против направления вращения. Для двигательного режима его назвали двигательным моментом. А в генераторном – тормозным моментом. В явнополюсном синхронном двигателе электромагнитный момент может быть создан при отсутствии тока возбуждения, за счет наличия М”, который получил название реактивного момента. Зависимость момента М функции угла θ называется угловой характеристикой синхронного двигателя, которая располагается в третьем квадранте (рис. 3.54 методичка). То есть, в области отрицательных углов нагрузки θ. Максимальное значение момента характеризует перегрузочную способность (кратность максимального момента) синхронного двигателя, кратность максимального момента 𝑀 𝑚𝑎𝑥 𝑘𝑚𝑎𝑥 = 𝑀н (102). Для синхронных двигателей эта величина согласно ГОСТ 183-85 должна быть не менее 1,65. При номинальной нагрузке (рис. 3.54 методичка) угол θ составляет примерно 20-35 градусов. V-образные характеристики Для синхронного двигателя можно так же, как и для синхронного генератора получить V-образные характеристики. Для этого построенный с помощью векторных диаграмм при некоторой нагрузке P=const используем (рис. 3.55, 3.56 методичка).
Для построения векторных диаграмм и V-образных характеристик используем уравнение напряжения для неявнополюсного синхронного двигателя −𝐸0 = 𝑈𝑐 − 𝑗𝐼1𝑋синх (103). Будем считать, что магнитная система двигателя не насыщена. Когда подключили синхронный двигатель к сети, то напряжение сети и напряжение двигателя находятся в противофазе (рис. 3.51 правый, методичка). Так как на валу синхронного двигателя имеет место некоторая нагрузка Р1=cosnt, то синхронный двигатель работает при некотором минимальном токе якоря (рис. 3.56 методичка). В этой точке cos(φ) равен единице. Перетока реактивной мощности между сутью и двигателем нет. На векторной диаграмме этой точке соответствует векторная диаграмма с индексом 1. В соответствии с уравнением (103) построена векторная диаграмма.
Теперь увеличим ток возбуждения синхронного двигателя, увеличение тока возбуждения приведет к увеличению тока якоря и попадем в точку 3. Кроме увеличения тока якоря должно увеличится ЭДС Е0. Увеличение данной ЭДС Е0, как было отмечено ранее, происходит в двигателе при опережающем токе якоря, что видно на векторной диаграмме (рис. 3.55 методичка). Вернулись в точку 1. Из этой точки уменьшаем ток возбуждения, это приведет к увеличению тока якоря и попаданию в точку 2. При этом ЭДС Е0 уменьшается, а ток в обмотке якоря будет отстающий. В результате чего с помощью векторной диаграммы (рис. 3.55 методичка), можно получить Е0. Соединим точки 1-2-3, зависимость I1 функции Iв называется V-образной характеристикой. Если менять ток возбуждения, коэффициент мощности будет уменьшатся, ибо появится реактивная мощность. Такие же V-образные характеристике можно получить и при других значениях активной мощности Р. При этом для каждой такой V-образной характеристики можно получить минимум тока якоря, обеспечивающий cos(φ) равный единице. Но при этом всегда можно получить при разных мощностях cos(φ) равный единице. Для семейства V-образных характеристик можно получить следующие области работы синхронного двигателя. 1) Область полного возбуждения. Cos(φ) равен единице, ток в обмотке якоря минимальный и активный, перетока реактивной мощности нет. 2) Область перевозбуждения. Ток якоря опережающий, а реакция якоря продольная размагничивающая, реактивная мощность отдается в сеть. 3) Область недовозбуждения. Ток якоря отстающий, реакция якоря продольная подмагничивающая, реактивная мощность потребляется из сети. 4) Область выпадения из синхронизма. Двигатель работает в аварийном режиме (асинхронный режим), частота вращения поля не равна частоте вращения индуктора. Существенно повышается ток в обмотке якоря, что приводит к существенному нагреву машины. Синхронные двигатели, как правило, работают с перевозбуждением и cos(φ) = 0.9. При перевозбуждении синхронный двигатель генерирует реактивную мощность в сеть, что способствует повышению коэффициента мощность в сети. Это позволяет снизить реактивную мощность, вырабатываемую синхронными генераторами на электрических станциях. И уменьшить электрические потери в линиях электропередач. Возможность генерировать реактивную мощность выгодно отличает синхронные двигатели от асинхронных двигателей, которые потребляют реактивную мощность из сети.
Рабочие характеристики синхронного двигателя (рис. 3.57 методичка) Это зависимость I1, P1, КПД, М2 функции Р2. При условии I1=const, f=const, cos(φ)=const. М2 функции Р2: 𝑘𝑃2 𝑀2 = 𝑛 ~𝑃2 (104) Так как частота вращения индуктора равна частоте вращения магнитного поля и равна const, то момент пропорционален мощности и данная характеристика носит линейный характер. К рабочим характеристикам также должна относится характеристика функции М(Р2). Iв функции Р2: Необходимо регулировать ток возбуждения, при увеличении нагрузки ток возбуждения необходимо увеличивать. Р1 функции Р2: При увеличении нагрузки вся потребляемая мощность Р1 расходуется, одна часть на полезную мощность, вторая часть — это суммарные потери, которые имеют место в синхронном двигателе. В режиме холостого хода Р1=Р0. Эта мощность необходима для компенсации постоянных потерь (механические и магнитные потери). Аналогично изменяется с изменением нагрузки и ток в обмотке якоря. В режиме холостого хода ток якоря I1 равен току холостого хода. КПД функции Р2: Вид этой характеристики точно такой же, как и для всех электрических машин. Объяснение точно такое же, как и было объяснено для электрических машин (трансформатор, асинхронная машина).
LECTION #9 Пуск синхронных двигателей Электромагнитный момент в синхронном двигателе создается в результате взаимодействия магнитного поля, созданного обмоткой якоря и магнитного поля обмотки возбуждения и не изменяет знак, если индуктор синхронно вращается с магнитным полем созданным трехфазной системой токов обмотки якоря. Если обмотку якоря подключить к источнику переменного напряжения, то синхронный двигатель в ход запущен не может быть, так как при возбужденном неподвижном индукторе полюса вращающегося магнитного поля якоря будут совпадать в течении одного полупериода с полюсами индуктора одной полярности, а в течении другого полупериода с полюсами другой полярности. В следствии этого будет изменятся направление вращающегося электромагнитного момента, а в следствии механической инерции индуктора, этот момент не может в течении полупериода раскрутить индуктор до синхронной частоты вращения. Для синхронных двигателей существуют следующие способы пуска: 1) С помощью разгонного двигателя; 2) Частотный пуск; 3) Асинхронный пуск синхронного двигателя; Разгонный двигатель Механически соединяя вал синхронного двигателя с валом разгонного двигателя и с помощью его разгоняем индуктор до номинальной частоты вращения. При этом обмотка якоря разомкнута, а обмотка возбуждения подключена к источнику постоянного напряжения. Синхронная машина работает в режиме генератора на холостом ходу. Разогнав синхронную машину д номинальной частоты вращения отключают разгонный двигатель и обмотку якоря подключают к источнику переменного напряжения и регулируют ток возбуждения синхронной машины, чтобы двигатель втянулся в синхронизм. Мощность разгонного двигателя составляет примерно 10-20% мощности синхронного двигателя.
Частотный пуск Для использования данного способа необходимо в обмотку якоря включить регулирующее устройство, с помощью которого можно регулировать частоту f, питающего напряжения подаваемого на обмотку якоря. Известно, что частоты вращения магнитного поля пропорциональна частоте питающей сети 60𝑓1 𝑛1 = 𝑝 ~𝑓1 (105), изменяя частоту от некоторой минимальной величину до номинальной, можно регулировать частоту вращения в синхронном двигателе так же от минимальной до номинальной. В этом случае, с экономической точки зрения такая установка обойдется дороже. Асинхронный пуск (рис. 3.58, 3.59 методичка) Этот способ пуска аналогичен пуску асинхронного двигателя. Данный способ рассмотрим на примере явнополюсного синхронного двигателя. В таком двигателе в полюсных наконечниках полюсов располагается коротко замкнутая обмотка типа беличьей клетки, которая получила название пусковой обмотки.
Перед пуском обмотку возбуждения синхронного двигателя замыкают на разрядное сопротивление. Затем замыкают рубильник Р1 и подают питание на обмотку якоря. Трехфазная обмотка якоря создает круговое вращающееся магнитное поле, это поле пересекает проводники пусковой обмотки и наводит в ней ЭДС и ток. Взаимодействие созданного магнитного поля и тока пусковой обмотки обеспечит появление электромагнитного момента, под влиянием которого индуктор синхронной машины придет во вращение. Установившаяся частота вращения индуктора, в этом случае составит примерно 95% от синхронной частоты вращения. То есть, синхронна машина будет работать в асинхронном режиме. Достигнув этой частоты вращения с помощью выключателя труб, обмотку возбуждения переключают с разрядного сопротивления на сеть постоянного тока. И регулируя ток возбуждения втягивают синхронную машину в синхронизм, за счет возникающего удельного синхронизирующего момента. Разрядное сопротивление R должно быть примерно взято в 10-15 раз больше сопротивления обмотки возбуждения. Асинхронный пуск синхронного двигателя нельзя выполнить при следующих условиях: 1) Если обмотку возбуждения оставить разомкнутой на момент пуска; 2) Если обмотку возбуждения замкнуть накоротко; Первый случай Если обмотку возбуждения оставить разомкнутой на момент пуска и осуществить этот пуск, то тогда на выводных концах обмотки возбуждения будет индуцироваться значительная ЭДС, которая может быть в несколько раз больше, чем рабочее напряжение обмотки возбуждения. Это связано с тем, что обмотка возбуждения многовитковая, значит обладает большой индуктивностью. Такой пуск приведет к электрическому пробою изоляции обмотки возбуждения, а также величина это ЭДС может быть опасна и для обслуживающего персонала. Второй случай В этом случае также пуска синхронного двигателя не произойдет. Замкнув обмотку возбуждения накоротко, оказывается, что обмотка возбуждения образует однофазный несимметричный контур. Такой контур обеспечит в нем появление пульсирующего магнитного поля. Это пульсирующее магнитное поле можно разложить на два магнитных поля: прямое и обратное. Взаимодействие этих полей с током вызовет появление электромагнитного момента от прямого и обратного магнитных полей. Может оказаться такая ситуация, при которой величина электромагнитного момента от обратного поля может быть существенным, что приведет к провалу механической характеристики для синхронного двигателя (рис. 3.59 методичка). Особенно это опасно, если синхронный двигателя запускается под нагрузкой, в этом случае момент двигателя может оказаться меньше чем нагрузочный момент. Двигателя не раскрутится. Явление, которое происходит в этом случае – одноосный эффект. Синхронный компенсатор (рис. 3.60, 3.61 методичка)
Синхронные компенсаторы используются для поддержания неизменности напряжения в узлах сети, при этом часы максимальных нагрузок (дневное время), они работают как источники реактивной мощности. А в часы минимальных нагрузок (ночное время) работают как потребители реактивной мощности. Кроме того, синхронные компенсаторы можно использовать в качестве двигателей, позволяющих повысить коэффициент мощности в сети. Рассмотрим, как с помощью синхронного компенсатора можно улучшить коэффициент мощности сети. Пусть, на электрической станции вырабатывается как активная, так и реактивная мощность. И на линии электропередач эта мощность будет передаваться непосредственно к потребителям. При этом синхронный компенсатор отсутствует (рис. 3.60 методичка). В результате этого, для такого состояния работы данной системы, можно построить векторную диаграмму (рис 3.61). Обозначим ток в линии электропередач без синхронного компенсатора символом I и будем считать, что потребителями являются потребители реактивной мощности, какими в большинстве случаев, являются асинхронные двигатели. Тогда для этого случая ток, протекающий в ЛЭП будет отставать на угол φ. Этот ток можно разложить на две составляющие: реактивную и активную. Для повышения коэффициента мощности в сети, вблизи потребителей реактивной мощности (нагрузки) подключают синхронный компенсатор. Этот синхронный компенсатор работает в режиме холостого хода с перевозбуждением. Зная физическую суть процессов, происходящих в синхронном двигателе, оказывается, что такой компенсатор генерирует реактивную мощность (только реактивную мощность) в сеть при опережающем токе якоря по отношению к напряжению сети. Таким образом, реактивная составляющая синхронного компенсатора может скомпенсировать частично или полностью реактивную составляющую тока сети. В результате этого уменьшается реактивная составляющая сети, а значит и уменьшается ток, протекающий в линии электропередач I’. При этом уменьшился угол φ сети. А коэффициент мощности увеличился. Машины постоянного тока Назначение машин постоянного тока Машины постоянного тока являются обратимыми машинами, они могут работать как двигателями, так и генераторами. Двигатели обладают хорошими регулировочными свойствами, обладают значительной перегрузочной способностью и применяются: 1) В черной металлургии (прокатные станы, кантователи, транспортеры); 2) На транспорте (электровозы, тепловозы, электромобили, авиация); 3) В текстильной, бумажной, полиграфической промышленности; Двигатели постоянного тока небольшой мощности применяются в системах автоматики, бытовой техники. Генераторы постоянного тока до недавнего времени применялись: 1) Для зарядки аккумуляторных батарей; 2) Для питания двигателей постоянного тока, стационарных и передвижных установок; 3) Для питания гальванических и электролизных печей; 4) Для электроснабжения тепловозов, электровозов, электричек, самолетов; В настоящее время генераторы постоянного тока постепенно отходят на второй план, в связи с появлением силовой электроники. Вместо генераторов постоянного тока в стационарных установках начали применять полупроводниковые преобразователи, а на транспорте синхронные генераторы, работающие с полупроводниковыми выпрямителями. Необходимо отметить, что существенным недостатком, как для двигателей, так и для генераторов является наличие коллектора, который требует тщательного ухода. Устройство машины постоянного тока Состоит из двух основных частей: 1) Неподвижная часть (индуктор); 2) Вращающаяся часть (якорь); Устройство индуктора Индуктор состоит из: 1) Главных полюсов; 2) Обмотки возбуждения главных полюсов; 3) Компенсационная обмотка; 4) Добавочные полюса с обмоткой добавочных полюсов; 5) Станина; 6) Коробка выводных концов; 7) Заводской щиток; 8) Подшипниковые щиты; Главные полюса набираются из штампованных пластин электротехнической стали определенной формы (рис. 4.16 методичка). Отштампованные пластины не изолируются. Отштампованные пластины собирают в пакет определенной длины и скрепляют с помощью шпилек.
На главных полюсах располагаются обмотка возбуждения главных полюсов (рис. 4.13, 4.14 методичка). Эта обмотка возбуждения предназначена для создания основного магнитного потока Фв. В машинах средней и большой мощности между главными полюсами устанавливают добавочные полюса со своей обмоткой возбуждения. Добавочные полюса показаны на (рис. 4.11, 4.19 методичка). 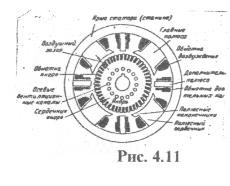  
Обмотка добавочных полюсов предназначена для безискровой работы коллектора при неизменном положении щеток на коллекторе, что позволяет улучшить коммутационные свойства машины постоянного тока. В машинах постоянного тока применяют следующие виды обмоток с их соответствующей маркировкой выводных концов: - Я1- Я2 обмотка якоря; - Ш1-Ш2 шунтовая обмотка возбуждения; - Д1-Д2 обмотка добавочных полюсов; - К1-К2 компенсационная обмотка; - С1-С2 сериесная обмотка; Я1-Я2 – в пазах якоря. Ш1-Ш2 – на главных полюсах. Д1-Д2 – на добавочных полюсах. К1-К2 – на пазах полюсного наконечника главных полюсов. С1-С2 – на главных полюсах. Д1-Д2, К1-К2, С1-С2 – включаются последовательно с обмоткой якоря. Все обмотки, используемые в машинах постоянного тока, выполняются из медного изолированного провода. Ш1-Ш2 – обмотка малого сечения. Д1-Д2, К1-К2, С1-С2 – обмотки большого сечения. Главные добавочные полюса с помощью болтов крепятся к корпусу машины (рис. 4.12, 4.14 методичка). На корпусе машине устанавливается коробка выводных концов к клеммам которой подключаются выводные концы обмоток, которые используются в той, или иной машине. На корпусе машины устанавливают заводской щиток, на котором показаны паспортные данные машины. К ним относятся: Рн – номинальная мощность, Uн – номинальное напряжение, Iн – номинальный ток, номинальный КПД, nн – номинальная частота.
Устройство якоря Якорь состоит из: 1) Сердечника; 2) Обмотка якоря; 3) Вал; 4) Коллектор; 5) Щеточный аппарат; 6) Подшипники; Сердечник набирается из штампованных пластин электротехнической стали определенной формы (рис. 4.22 методичка). Эти пластины с двух сторон изолируются, с целью уменьшения магнитных потерь. Отштампованные пластины запрессовываются на вал (рис. 4.23 б, методичка). В результате чего получаем сердечник, примерно равный в длине главным полюсам. В образовавшиеся пазы укладываем проводники обмотки якоря (рис. 4.24 а, методичка). Уложив проводники обмотки якоря, обмотка сушится, пропитывается и вновь сушится с целью повышения надежности обмотки. Такую операцию выполняют для всех обмоток.   
На вал запрессовывают коллектор, коллектор состоит из двух основных частей: 1) Коллекторных пластин; 2) Изоляционных прокладок; Коллекторные пластины имеют форму ласточкиного хвоста (рис. 4.30, 4.32 методичка). Они выполняются из меди. Между коллекторными пластинами устанавливают изоляционные прокладки, выполняемые из слюды, миканита, то есть из материалов с высокой электрической прочностью. Коллекторные пластины тщательно обрабатывают. К коллекторным пластинам подсоединяют выводные концы секций обмотки якоря. В подшипниковом щите, со стороны коллектора устанавливают щеточный аппарат, в котором устанавливают щетки (рис. 4.12 б позиция 8, методичка). Щетки скользят по наружной поверхности коллектора. Это необходимо для электрической связи якорной цепи с внешней цепью.
На вал запрессовывают подшипники, на подшипники запрессовываем подшипниковые шипы, которые с помощью болтов, или шпилек крепят к станине машины. Для обеспечения свободного вращения якоря между главными полюсами и якорем устанавливают требуемую величину воздушного зазора.
LECTION #10
LECTION #11 Генераторы постоянного тока Классификация по способу возбуждения По способу возбуждения генераторы постоянного тока делятся: 1) Генераторы постоянного тока с независимым возбуждением; 2) Генераторы постоянного тока с параллельным возбуждением; 3) Генераторы постоянного тока с последовательным возбуждением; 4) Генераторы постоянного тока с смешанным возбуждением; По конструкции перечисленные генераторы ничем не отличаются. Они только отличаются выполнением обмотки возбуждения. Обмотка возбуждения генератора постоянного тока с независимым и параллельным возбуждением имеют большое число витков, но малое сечение провода. Сериесная обмотка возбуждения имеет небольшое число витков, но имеет провод большого сечения. Электрические схемы генераторов постоянного тока 1) Генератор постоянного тока с независимым возбуждением (рис. 5) Это такой генератор, у которого обмотка возбуждения получает питание от постороннего источника Uв. 2) Генераторы постоянного тока с параллельным возбуждением (рис. 6) Это такой генератор, у которого обмотка возбуждения Ш1, Ш2 подключается параллельно к обмотке якоря. 3) Генератор постоянного тока последовательного возбуждения (рис. 7) Это такой генератор, у которого сериесная обмотка возбуждения С1, С2 подключается последовательно с обмоткой якоря. 4) Генератор постоянного тока смешанного возбуждения (рис. 8) Это такой генератор, который имеет две обмотки возбуждения. ОВ1 – сериесная обмотка возбуждения (С1, С2), которая последовательно включается с обмоткой якоря. И ОВ2 – шунтовая обмотка возбуждения (Ш1, Ш2), которая включается параллельно обмотке якоря. Генератор постоянного тока с независимым возбуждением Так как, обмотка возбуждения получает питание от постороннего источника, то ток возбуждения не зависит от тока якоря и величина этого тока определяется положением (величиной) регулировочного реостата Rрв 𝑈𝑏 включенного в цепь обмотки возбуждения 𝐼𝑏 = 𝑅 𝑏+𝑅𝑝𝑏 (106). Свойство данного генератора можно охарактеризовать с помощью его характеристик, а именно: 1) Характеристика холостого хода; 2) Характеристика короткого замыкания; 3) Внешние характеристики; 4) Регулировочные характеристики; 5) Нагрузочные характеристики; Характеристика холостого хода 𝐸𝑎 = 𝑈 = 𝑓(𝐼𝑏),𝑛 = 𝑐𝑜𝑛𝑠𝑡, 𝐼𝑎 = 0 (107) Вид данной характеристики: (рис. 4.79 методичка).
Данную характеристику начинают снимать с точки соответствующей примерно Ea=1.3Uн. Даная характеристика имеет две ветви: нисходящую, восходящую. После установления точки 1.3Uн уменьшают ток возбуждения и снимают ряд точек. Необходимо помнить – переснимать предыдущие точки нельзя, так как вы попадете на другую петлю гистерезиса и точно снять данную характеристику не удастся. Дойдя до точки Iв=0 в обмотке якоря измеряют, так называемую, остаточную ЭДС Еост. Затем изменяют полярность на обмотке возбуждения и продолжают снимать нисходящую ветвь до точки -1.3Uн. Затем снимают восходящую ветвь, уменьшая ток возбуждения, той же полярности, доходят до точки Iв=0, вновь меняют полярность на обмотке возбуждения и возвращаются в точку 1.3Uн. При токе возбуждения равным нулю остаточная ЭДС составляет примерно 1-3% от номинального напряжения. Ее наличие связано с наличием потока остаточного магнетизма. Разница между восходящей и нисходящей ветвями объясняется наличием гистерезиса в магнитопроводе генератора.
|
|||||||||||
|
|
Последнее изменение этой страницы: 2017-01-19; просмотров: 779; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.118.32.6 (0.016 с.) |