Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Устройство не явно полюсной СМСодержание книги
Поиск на нашем сайте Синхронные машины
Назначение синхронных машин СМ широко применяют в качестве генератора и двигателя. Наиболее широко в качестве генератора (источников электрической энергии) которые устанавливаются на тепловых, атомных, гидравлических, гидроаккумулирующих станциях, на транспорте, в авиации.
Констркция СМ определяется типом привода (для синхронных, генераторов). В зависимости от этого синхронные генераторы делятся: • турбогенераторы (не явно полюсные СМ) 1500-3000 об/мин • гидрогенератор (явно полюсные СМ) 50-500 об/мин • дизель генераторы 100-1000 об/мин
Для турбогенераторов приводом является паровая турбина. Для гидрогенераторов приводом является гидротурбина. Для дизель-генераторов используют двигатель внутреннего сгорания.
Широкое применение СМ получили в качестве двигателей. Они применяются для генерирования реактивной мощности в сеть, улучшения коэффициента мощности сети и стабилизации выходного напряжения. Широкое применение получили СМ в системах автоматики и бытовой техники, а именно: • СМ с постоянным магнитом • гистерезисные • шаговые • индукторные
Устройство СМ СМ - это вращающаяся электромагнитное устройство, имеющее 2 связанные между собой обмотки и предназначенное для преобразования одного вида энергии в другой. Которое осуществляется при неизменной частоте вращения. То есть частота вращения индуктора n равна частоте вращения магнитного поля. n = n1 СМ состоит из двух частей; • якорь (не вращающаяся часть) • индуктор (вращающаяся часть)
В зависимости от конструкции индуктора СМ делятся на: • явно полюсные (гидрогенераторы); • не явно полюсные (турбогенераторы).
Устройство явно полюсной СМ
Устройство якоря: Якорь состоит: • сердечник • обмотка якоря (ОЯ) • корпус (станина) • коробка выводных концов • заводской щиток • подшипниковые щиты.
Сердечник якоря набирается из штампованных листов холоднокатаной эл. тех. Стали (рис. 3.3) Отштампованные пластины изолируются с двух сторон для уменьшения магнитных потерь в стали. Такая форма листов используется для СМ малой и средней мощности. Для крупных СМ сердечник якоря набирается из штампованных сегментов (рис. 3.3а) так же изолированных. Отштампованные пазы изолируют и в них укладывают обмотку якоря (ОЯ) которая выполняется из медного изолированного провода круглого или прямоугольного сечения.! Будем рассматривать 3-фазные СМ. Поэтому в пазы сердечника якоря укладывают 3-фазную обмотку, которая соединяется либо в звезду, либо в треугольник. Для крупных СМ обмотка звезда. Собранный сердечник якоря с обмотками якоря запрессовывают в корпус машины. На корпус машины устанавливают коробку выводных концов к клеммам которых подключают выводные концы обмотки якоря. Выводные концы маркируются; С1, С2, С3 – начало, С4, С5, С6 – концы.
На корпусе устанавливают заводской щиток, в котором указывают паспортные данные, к ним относятся; • полезная мощность (Р2н) • номинальное напряжение (U1н) • номинальный ток (I1н) • частота вращения магнитного поля (n1) • КПД • коеф. Мощн. • напряжение обмотки возбуждения (Uвн) • ном. Ток обмотки (Iвн). • Устройство индуктора:
Индуктор состоит: • полюса • обмотка возбуждения (ОВ) • КЗ обмотка • вал • контактные кольца • щеточный аппарат • возбудитель • подшипники.
Полюса набираются из штампованных пластин ел. технической стали определенной формы (рис 3.2) Затем на собранный полюс устанавливают катушки Обмотки возбуждения (ОВ) (рис 3.2). Их выполняют из медного изолированного провода. В пазы отштампованных наконечников запрессовывают стержни, которые выполняются из меди или латуни (материалы с повышенным удельным сопротивлением) И эти стержни на каждом полюсе с 2 концов между собой замыкаются (рис. 3.4) Собранные полюса с катушками закрепляют на валу (рис 3.2) С помощью междуполюсных перемычек замыкают все стержни на всех полюсах образуя КЗ обмотку (рис 3.4)
Предназначение КЗ обмотки Все определяется в каком режиме работает СМ: • Если СГ – это успокоительная или дэльферная обмотка. Предназначенная для того что бы избавится или уменьшить мех. колебания индуктора. • Если СД – это обмотка, предназначенная для пуска двигателя. Такой пуск получил название асинхронный пуск синхронного двигателя. Катушки соединяются, образуя обмотку возбуждения ОВ. Маркировка И1, И2 – однофазные обмотки. Обмотка возбуждения, предназначенная для создания первичного магнитного поля. На вал запрессовывают контактные кольца (рис. 3.7 позиция 2) к которым подключают выводные кольца обмотки возбуждения. В подшипниковом щите со стороны контактных колец устанавливают щеточный аппарат, щетки которого скользят по контактных кольцах. На вал устанавливают возбудитель (рис. 3.7 поз.1). В качестве которого используют генератор постоянного тока ГПТ. Таким образом в СМ используются 2 вида электрического тока: • постоянный ток (для обмотки возбуждения) • переменный ток (по обмотке якоря).
На вал запрессовывают подшипники, на подшипники запрессовывают подшипниковые щиты, которые крепятся к корпусу машины. Для свободного вращения индуктора обеспечивают воздушный зазор между полюсами и сердечником якоря.
LECTION #2 Емкостная нагрузка
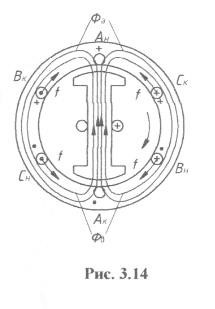
Здесь угол Ψ равен π/2. Рассматривая режим холостого хода при этой нагрузке, объяснение точно такое-же, как и при индуктивной нагрузке. Подключив обмотку якоря к емкостной нагрузке по фазам этой обмотки будут протекать токи I1a, b, c которые согласно (рис. 3.15 методичка) в фазах будут опережать соответствующие фазные ЭДС Е0а, b, c на угол 90 градусов. Теперь определим направление токов протекающим по фазам обмотки якоря, для чего спроектируем вектора этих токов на действительную ось трехфазной системы. Эти токи протекающие по фазам обмотки якоря наведут МДС, а эти МДС создадут магнитное поле якоря Фа. Направление этого поля определяем по правилу буравчика (рис. 3.14 методичка). Рассматривая этот рисунок видно, что магнитное поле якоря Фа направлено по продольной оси и при этом по направлению совпадает с направлением Фб. При емкостной нагрузке говорят: в синхронном генераторе действует продольная отмагничивающая реакция якоря, которая увеличивает результирующий магнитный поток, а значит и результирующие ЭДС. Эти величины отличаются от соответствующих величин в режиме холостого хода.
Активная нагрузка 𝛹 равно нулю. (рис. 3.16, 3.17 методичка)
Режим холостого хода ничем не отличается от рассмотренных ранее при получении соответствующих ЭДС Е0а, b, c. Подключив к обмотке якоря активную нагрузку по фазам этой обмотки будут протекать токи якоря I1a, b, c которые в следствии наличия активной нагрузки будут совпадать по направлению с соответствующими ЭДС Е0а, b, c что видно на (рис. 3.17 методичка). Направление этих токов определяем точно так же, как и в предыдущих случаях. Как видно, из (рис. 3.16 методичка) направление токов и ЭДС совпадают. Токи в обмотке якоря создадут магнитодвижущие силы, которые в свою очередь наведут магнитный поток якоря, направление которого определяем по правилу буравчика. Как видно из (рис. 3.16 методичка). Магнитное поле якоря действует поперек оси полюсов, таким образом говорят, что при активной нагрузке действует поперечная реакция якоря. В общем случае, когда 𝛹 >0, но по абсолютному значению ток якоря можно разложить в равной степени и МДС якоря на две составляющие. 𝐼1𝑞 = 𝐼1 ∗ cos 𝛹 𝐹𝑎𝑞 = 𝐹𝑎 ∗ cos 𝛹 𝐼1𝑞 = 𝐼1 ∗ sin 𝛹 𝐹𝑎𝑑 = 𝐹𝑎 ∗ sin 𝛹
Активно-емкостная нагрузка (рис. 3.20 методичка)
При этой нагрузке вектор тока I1 опережает вектор напряжения на некоторый угол φ. Само построение и объяснение аналогично предыдущему случаю. Рассматривая данные векторные диаграммы видно, что при активно-емкостной нагрузке МДС возбуждения необходимо меньше по сравнению с активно-индуктивной нагрузкой. Это связано с тем, что в активно-индуктивной нагрузке действует продольно размагничивающая реакция якоря.
Рис. 3.23 индуктивное сопротивление рассеивания 𝑥𝑎𝑑 ≫ 𝑥𝛿1, 𝑥𝑎𝑞 ≫ 𝑥𝛿1 (37). Поэтому синхронные индуктивные сопротивления по продольной поперечной оси 𝑥𝑑 ≈ 𝑥𝑎𝑑, 𝑥𝑞 ≈ 𝑥𝑎𝑞 (38). Из ТОЭ известно, что индуктивное сопротивление пропорционально магнитной проводимости, которая в свою очередь равна
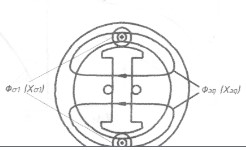
В синхронных машинах с ненасыщенной магнитной системой коэффициент насыщения примерно равен единице. (рис. 3.24 методичка) Тогда при прочих равных условиях согласно (39) индуктивное сопротивление обратно пропорционально воздушному зазору. Ось продольного потока якоря Фad направлена по оси полюсов, где воздушный зазор минимальный, а ось поперечного магнитного потока Фaq совпадает с серединой межполюсного пространства, где воздушный зазор максимальный. Значит, эквивалентный зазор для продольной оси будет меньше чем воздушный зазор для поперечного магнитного потока. В следствии этого магнитная проводимость по продольной оси будет больше, чем по поперечной оси, а значит индуктивное сопротивление по продольной оси будет больше чем по поперечной оси.
Для синхронных машин, синхронные индуктивные сопротивления имеют следующие значения. Xd в относительный единицах 0.7-1.5. Xq составляет 0.4-0.9. С насыщенной магнитной системой коэффициент насыщения больше единицы. И поэтому для таких синхронных машин Xd, Xq несколько уменьшается. Более заметное уменьшение оказывает на синхронные сопротивления Xd. В неявнополюсных синхронных машинах, в которых воздушный зазор равномерный индуктивное сопротивление Xd, Xq примерно одинаковы. Рис. 3.24
Индуктивное сопротивление явнополюсных синхронных машин можно определить опытным путем. Для этого необходимо выполнить, так называемый, опыт скольжения (опыт малого скольжения). (рис. 2) Перед выполнением опыта проверяют согласованные вращения индуктора от приводного двигателя и магнитного поля, созданного обмоткой якоря. Обмотка якоря отключена, включают приводной двигатель и смотрят в какую сторону вращается индуктор и запоминают направление вращения. Затем отключают приводной двигатель, подключают обмотку якоря к источнику переменного напряжения, напряжение подает пониженную величину. Но достаточно, для того чтобы, было создано магнитное поле, которое увлечет за собой индуктор. Он приведет к вращению и замечаем в какую сторону вращается индуктор. Если индуктор вращается в одну и ту же сторону как от приводного двигателя, так и от магнитного поля, то тогда это согласованное вращение индуктора. И вольтметр, включенный в обмотку возбуждения покажет напряжение примерно равное нулю. Если несогласованное вращения, то вольтметр покажет достаточно большую величину напряжения. Для того что бы обеспечить согласованное вращение индуктора необходимо изменить чередование фаз в обмотке якоря. Затем включают приводной двигатель и подают питание на обмотку якоря. Дают рассогласование частоты вращения индуктора n от частоты вращения магнитного поля n1. При данном согласовании частот, частота вращения поля, а точнее, ось полюсов будет перемещаться относительно оси МДС якоря Фа с некоторой частотой скольжения. При совпадении оси МДС якоря с продольной осью индуктора магнитное поле в синхронной машине аналогично магнитному полю, которое показано на (рис. 3.23 методичка). А индуктивное сопротивление обмотки якоря будет равно Xd. При совпадении оси МДС якоря с поперечной осью индуктора, магнитное поле в машине будет аналогичным, как это показано на (рис. 3.24 методичка). А индуктивное сопротивление якоря будет равно Xq. Соответствующему изменению индуктивных сопротивлений Xd и Xq будет происходить колебание стрелок вольтметра и амперметра, которые включены в обмотку якоря. По этим приборам можно определить максимально и минимальное значение напряжения, максимально и минимальное значение тока. На основании этих показаний можно определить 𝑥𝑑 = √𝑈3 𝑚𝑎𝑥 𝐼𝑚𝑖𝑛, 𝑥𝑞
Так как, на обмотке якоря подается пониженное напряжение, то магнитная система такой машины оказывается ненасыщенной. В результате чего индуктивное сопротивление Xd и Xq также ненасыщенные величины. Кроме того, достоинством данного опыта является то, что, определив величины Xd и Xq, не разбирая машину можно сказать какой это тип (явнополюсный или неявнополюсный). Векторная диаграмма явнополюсного синхронного генератора с учетом насыщения При построении такой векторной диаграммы для синхронного генератора с учетом насыщения воспользуемся следующим уравнением 𝑈1 = 𝐸0 − 𝑗𝐼1𝑑𝑥𝑎𝑑 − 𝑗𝐼1𝑞𝑥𝑎𝑞 − 𝑗𝐼1𝑥𝛿1 − 𝐼1𝑅1 (41). Главное индуктивное сопротивление Xаd и Xаq в этом уравнении должны быть подставлены с учетом насыщения. Однако, такой учет насыщения магнитной цепи в явнополюсной машине вызывает большие затруднения. Так как, в машине с насыщенном магнитной системой поток по продольной оси Фad влияет на поперечный поток Фaq и наоборот. Точная методика для расчетов параметров с учетом насыщения на сегодняшний день нет. Поэтому пользуются приближенными методиками. Векторная диаграмма стоится по тем же принципам, как и векторная диаграмма без учета насыщения. А насыщение учитывается только для индуктивного сопротивления Xаd. Индуктивное сопротивление Xaq остается примерно равным. Однако экспериментальные данные, проведенные в настоящее время показали, что насыщение влияет и на сопротивление Xaq поэтому некоторые авторы отмечают, что Xaqнас необходимо брать примерно в 1.15 раза меньше чем Xaqненас. Рассмотрим построение векторных диаграмм для случаев: 1) Активно индуктивная; 2) Активно емкостная; Активно индуктивная (рис. 3.26 методичка)
Данная векторная диаграмма строиться на основании (41), только с определением ЭДС Е0 𝐸0 = 𝑈1 + 𝑗𝐼1𝑑𝑋𝑎𝑑 + 𝑗𝐼1𝑞𝑋𝑎𝑞 + 𝑗𝐼1𝑋𝛿1 + 𝐼1𝑅1 (42). Составляющие Id и Iq могут быть получены, если бы у нас была определена направляющая для ЭДС Е0. Для того что бы найти направляющую для ЭДС Е0 и обеспечить разложение тока I1 на две составляющие, поступают следующим образом: из точки (а) по направлению jI1Xб1 откладываем отрезок (аb). Этот отрезок равен ̅𝑎𝑏̅̅ = 𝐼1𝑥𝑎𝑞 (43). После чего, соединяем начало векторной диаграммы и точку (b). Таким образом получили направляющую для ЭДС Е0. После этого раскладываем вектор тока I1 на две составляющие I1d и I1q. Затем из точки (а) опускаем перпендикуляр в виде вектора jI1qXaq к вектору тока I1q. В результате чего получаем результирующую ЭДС Ебd по продольной оси. Взяв даную ЭДС и отложив ее величину на характеристике холостого хода, получаем соответствующую ей МДС результирующую по продольной оси Фбd. При работе синхронного генератора в режиме нагрузки, данная результирующая МДС будет равна 𝐹𝛿𝑑 = 𝐹𝑏 ± 𝐹𝑎𝑑 (44). МДС якоря по продольной оси можно определить на основании обмоточных данных, или на основании опыта холостого хода и короткого замыкания. При этом Фad это эквивалентная МДС, которая получена за счет применения метода двух реакций 𝐹𝑎𝑑 = 𝑘𝑑𝐹𝑎 sin 𝜓 = 𝑘𝑑𝐹𝑑 (45). В уравнении (44) знак плюс соответствует продольной подмагничивающей реакции якоря. Знак минус соответствует продольной размагничивающей реакции якоря. Определив результирующие МДС по продольной оси и определив МДС якоря по продольной оси и учитывая характер нагрузки, тогда общая МДС равна 𝐹𝑏 = 𝐹𝛿𝑑 + 𝐹𝑎𝑑 (46). Определяем Е0. Зная величину Е0 в виде вектора откладываем ее на векторной диаграмме. Рассматривая векторную диаграмму видно, что данный вектор I1dXad это разность между Е0 и Ебd. На основании данной векторной диаграммы можно определить изменения напряжения, или сбои нагрузки ∆𝑈 = 𝐸 0 −𝑈 1н 100 (47). 𝑈1н
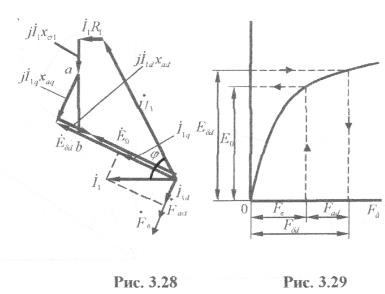
Активна емкостная (рис. 3.28, 3.29 методичка)
Построение данной векторной диаграммы ничем не отличается от построения для предыдущего случая, однако имеется ряд особенностей: 1) Как видно, из (рис. 3.28 методичка) вектор тока I1 опережает вектор напряжения на угол φ. 2) При определении намагничивающей силы Fb МДС Fad с учетом характера нагрузки необходимо взять со знаком минус 𝐹𝑏 = 𝐹𝛿𝑑 − 𝐹𝑎𝑑 (48). Характеристики синхронного генератора Рабочее свойство синхронного генератора, работающего в автономном режиме можно охарактеризовать с помощью его характеристик. К ним относятся: 1) Характеристика холостого хода; 2) Характеристика короткого замыкания; 3) Нагрузочная характеристика; 4) Внешняя характеристика; 5) Регулировочная характеристика; Характеристика холостого хода Свойство этой характеристики 𝐸0 = 𝑓(𝐹𝑏) или 𝐸0 = 𝑓(𝐼𝑏) (49). Вид данной характеристики и свойство ее были изложены и рассмотрены ранее. Характеристика короткого замыкания Свойство этой характеристики 𝐼1 = 𝑓(𝐼𝑏) при 𝑛 = 𝑐𝑜𝑛𝑠𝑡, 𝑈1 = 0 (50). Данная характеристика (рис. 3) носит линейный характер, это связано с тем, что в режиме короткого замыкания действует продольная размагничивающая реакция якоря, которая размагничивает магнитную систему. При отсутствии тока возбуждения в обмотке якоря будет протекать некоторый остаточный ток 𝐸0 = 𝑗𝐼1(𝑥𝛿1 + 𝑥𝑎𝑑) = 𝑗𝐼1𝑥𝑑 (51). Практическое значение характеристики короткого замыкания, совместно с характеристикой холостого хода позволяет определить: 1) Xd. 2) МДС реакции якоря Fad или Fa. 3) Отношение короткого замыкания (ОКЗ). Данные величины определим используя (рис. 3.30 методичка).
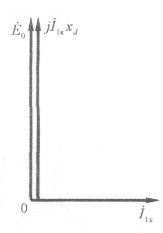
LECTION #5 Определение Xd Снимая характеристику короткого замыкания напряжение равно нулю, активное сопротивление примерно равно нулю, поперечная составляющая потока якоря отсутствует. Тогда в режиме короткого замыкания, ЭДС уравновешивается падением сопротивления по продольной оси. Согласно этого уравнения (51) можно построить векторную диаграмму, которая показана на (рис. 3.31 𝐸 0 методичка). Исходя из (51) можно определить Xd 𝑥𝑑 = 𝐼1𝑘 (52).
Рис. 3.31 Данное значение можно также определить с помощью характеристики холостого хода без учета насыщения и характеристики короткого замыкания (рис. 3.30 методичка). Если взять произвольное значение точки Iв(1). В этой точке по характеристике короткого замыкания по кривой 1, находят ток короткого замыкания I1k(1). И для тока возбуждения Iв(1) для характеристики холостого хода без учета насыщения определяют Е0. Зная Е0 и ток короткого замыкания можно определить Xd. Так как в режиме короткого замыкания магнитная система не насыщена, то Xd соответствует ненасыщенному значению. Определение МДС якоря МДС якоря можно определить, построив так называемый характеристический треугольник, для чего воспользуемся (рис. 3.30 методичка). На характеристике холостого хода, кривая 2, откладываем падение напряжения на индуктивном сопротивлении рассеивания Xб1. Получили точку С. Из точки С опустили перпендикуляр на ось Iв и получили току В. Затем для тока возбуждения соответствующего номинальному значению I*в=1, по характеристике короткого замыкания, определяем ток короткого замыкания, равного номинальному току. Получаем точку А. Треугольник АВС называется характеристическим треугольником. В этом треугольнике катет ВС характеризует падение напряжения на сопротивлении Xб1, а катет ВА характеризует действие реакции якоря. 𝐹𝑎𝑑 = 𝐾𝑑𝐹𝑑 (53) для ЯСМ, 𝐹𝑎𝑑 = 𝐹𝑎 (54) для НЯСМ. 𝐼 ОКЗ 𝐼1н к номинальному току якоря (рис. 3.32 методичка).
Рис. 3.32 Синхронные машины с малым ОКЗ дают большие изменения напряжения при работе под нагрузкой, обладающей меньшей устойчивостью при параллельной работе с сетью. Но, зато являются более дешевыми (в таких машинах воздушный зазор между якорем и индуктором меньший). Для гидрогенераторов ОКЗ составляет 1-1.4, для турбогенераторов 0.5-0.7.
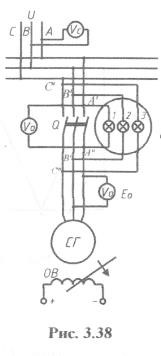
Внешняя характеристика Внешняя характеристика напряжения функции тока якоря, ее снимают при 𝑈1 = 𝑓(𝐼1),𝐼𝑏 = 𝑐𝑜𝑛𝑠𝑡, 𝑛 = 𝑐𝑜𝑛𝑠𝑡, cos𝜑 = 𝑐𝑜𝑛𝑠𝑡 (59). Данную характеристику можно снять: 1) На понижении напряжения; 2) На повышении напряжения; (Рис. 3.35 методичка). Если снимается внешняя характеристика на понижении напряжения, то начальной точкой является ток якоря – ноль, а напряжение – номинальное. При снятии на повышении напряжения, начальная точка – ток I1ном, напряжение U1ном. На вид характеристик существенное влияние оказывает коэффициент мощности. Таким образом при снятии внешних характеристик влияют два фактора: 1) Падение напряжения в обмотке якоря; 2) Действие реакции якоря, при чем, действие реакции якоря будет определятся характером нагрузки. При активной и активно-индуктивной нагрузках будет действовать продольная размагничивающая реакция якоря. При чем при активно-индуктивной нагрузке в большей степени. При активно-емкостной нагрузке будет действовать продольная подмагничивающая реакция якоря, и при увеличении тока якоря напряжение будет увеличиваться. Если рассмотреть внешнюю характеристику на повышении напряжения, то видно из (рис. 3.35 методичка), оказывается, что с уменьшением тока якоря, при активной и активно-индуктивной нагрузках, напряжения на зажимах генератора увеличивается, что связано с уменьшением действия продольной размагничивающей реакции якоря. При активно-емкостной нагрузке с уменьшением тока якоря, напряжение U1 уменьшается, так как уменьшается продольная подмагничивающая реакция якоря. По внешним характеристикам можно определить изменения напряжения ∆𝑈 = 𝐸 0 −𝑈 1н (60). 𝑈1н Первое условие Первое условие выполняется следующим образом: изменяя ток возбуждения синхронного генератора устанавливает величину ЭДС Е0 в обмотке генератора равному напряжению сети. Напряжение сети и ЭДС генератора Е0 осуществляют с помощью вольтметров, включённых в сеть и в обмотку якоря генератора, что видно на (рис. 3.38 методичка). Все остальные условия включения генератора на параллельную работу выполняются с помощью синхроноскопа (рис. 3.38 методичка).
Простейшим таким синхроноскопом является ламповый синхроноскоп, состоящий из трех ламп, включенных по специальной схеме (лампы 1,2,3). При отключённом выключателе Q синхронный генератор работает в режиме холостого хода и между контактами этого выключателя действует разностное ЭДС ∆𝑈 = 𝑈𝑐 + 𝐸0 (64). Если бы частота вращения индуктора синхронного генератора была постоянной и равной номинальной, то частота индуцируемой ЭДС Е0 равнялась бы напряжению сети (частоте напряжения). И вектора напряжения сети и ЭДС Е0 вращались бы с одинаковой угловой частотой. А ∆U была бы постоянной. В действительности частот вращения генератора нельзя сделать постоянной и частоты напряжения сети Uc и ЭДС Е0 несколько отличается друг от друга. Поэтому вектора у сети и Е0 перемещаются относительно друг к другу с некоторой разностной угловой частотой ∆𝑊 = 𝑊𝑐 − 𝑊Г = 2𝜋(𝑓𝑐 − 𝑓г) (65). В следствии этого изменяется и ∆U от нуля до двукратной величины напряжения сети. В следствии этого изменяется напряжение на лампах лампового синхроноскопа. Они будут одновременно загорятся или гаснуть. Наиболее благоприятное включение синхронного генератора параллельно с сетью в момент, когда лампы лампового синхроноскопа одновременно погаснут. В этом случае ∆U равна нулю, а вектора напряжения и ЭДС генератора будут находится в противофазе. В этом случае при ∆U равном нулю ток в обмотке якоря также ∆𝑈 равен нулю 𝐼1 = −𝑗 𝑋 синх = 0 (66). Равенство частот fсети и fгенер можно установить изменением частоты вращения приводного двигателя (рис. 3.38 методичка). А контроль осуществляет с помощью частотомера. Лампы лампового синхроноскопа гаснут при напряжении примерно равном 30-60% от номинального напряжения, поэтому для того чтобы более точнее подобрать время замыкания выключателя Q в него включают дополнительный вольтметр, который получил название нулевого вольтметра. Стрелки этого вольтметра медленно колеблются в соответствии с потуханием и загоранием ламп и покажет ноль, когда напряжение между клеммами, например, А’A” покажет ноль. Это момент замыкания рубильника выключателя Q и подключение генератора параллельно с сетью. Такой способ подключения генератора на сеть получил название включение на потухание. С помощью лампового синхроноскопа проверяют чередование фаз сети и генератора. Если лампы лампового синхроноскопа одновременно гаснут или загораются, то чередование фаз правильное. Если чередование фаз неодинаковое лампы лампового синхроноскопа одновременно не загораются и не гаснут. Для того чтобы выполнить данное условие необходимо изменить чередование фаз, либо в сети, либо в генераторе. Второе условие Выполняя точную синхронизацию оказывается, что для ее выполнения затрачивается достаточно большое время (до 10 минут), для того что бы уменьшить это время используют грубую синхронизацию (самосинхронизацию). Суть этого способа: при разомкнутой обмотке якоря и невозбужденном генераторе, с помощью приводного двигателя раскручивают индуктор до синхронной частоты вращения. Затем подают питание на обмотку якоря и одновременно подают питание на обмотку возбуждения. Изменяют ток в обмотке возбуждения и регулируют его таким образом, чтобы ток в обмотке якоря стал минимальным. После окончания переходного процесса синхронный генератор работает параллельно с сетью в синхронном режиме. Недостатком данного способа является существенный бросок тока в обмотке якоря. При первом включении генератора на сеть обязательно необходимо проверить чередование фаз в сети и в генераторе. Было отмечено что до включения синхронного генератора в сеть его частота вращения не постоянна, а после включения частота вращения генератора постоянна, то есть синхронный генератор держится в синхронизме. Рассмотрим, почему это так происходит. 1) Пусть по какой-то причине индуктор получил ускорение, тогда вектор ЭДС Е0 начинает вращаться в сторону положительного вращения векторов (рис. 3.40 левый, методичка). В результате этого появится разностная ЭДС ∆U, которая вызовет появление тока в обмотке якоря I1 (например, (61)). Так как активное сопротивление в обмотке якоря по сравнению с индуктивным сопротивлением маленькое, тогда ток в обмотке якоря индуктивный, он отстает от вектора ∆U на угол 90 градусов. А по отношению к вектору ЭДС Е0 отстает на угол Ψ. Угол Ψ меньше 90 градусов. В следствии этого появится электромагнитная мощность Рэм = 𝑚𝐸0𝐼1 cos 𝜓 > 0 (67), которая создаст электромагнитный момент. Этот момент будет тормозным и синхронный генератора будет работать в режиме генератора.
В результате действия тормозного момента в генераторном режиме, этого момент будет притормаживать вращение индуктора и вернет его в состояние синхронизма.
2) По какой-то причине дадим замедление индуктора. В результате этого, как видно из векторной диаграммы (рис. 3.40 правый, методичка). Вектор ЭДС Е0 будет вращаться по часовой стрелке, появится разностное ЭДС ∆U, которая вызовет протекание тока в обмотке якоря равного (66). И который по отношению к ∆U будет отставать из-за своего индуктивного характера по отношению к ∆U. А при этом по отношению к вектору ЭДС Е0 угол Ψ будет больше 90 градусов. При этом возникнет электромагнитная мощность (67), которая вызовет появление электромагнитного момента. Этот момент будет ускоряющим, то есть двигательным. И синхронная машина будет в режиме двигателя.
Этот момент будет ускорять вращение индуктора и доведет его до синхронной частоты вращения. Машина будет работать в режиме синхронизма.
Активная мощность, электромагнитный момент. Регулирование активной мощности. Угловые характеристики синхронного генератора, работающего параллельно с сетью. Активная мощность синхронного генератора, работающего параллельно с сетью можно регулировать изменением вращающего момента на его валу. Изменение вращающего момента можно осуществлять изменением тока возбуждения двигателя постоянного тока. Изменением подачи воды, или пара в турбину и т.д. Исходя из энергетической диаграммы, преобразование активной мощности синхронного генератора полезная мощность — это электромагнитная мощность минус электрические потери в обмотке якоря 𝑃𝑐 = Рэм − Рэа = 𝑚𝑈1𝐼1 cos 𝜑 (68). Так как электрические потери в обмотке якоря малы по сравнению с полезной мощностью, ими можно пренебречь и считать, что эти мощности примерно одинаковы 𝑃2 ≈ Рэм = 𝑚𝐸0𝐼1 cos 𝜑 (69). В дальнейшем будем считать, что 𝑃2 ≈ 𝑃эм = 𝑃 (70). Для определения активной мощности момента и угловых характеристик синхронного генератора, работающего параллельно с сетью рассмотрим два случая: 1) Для неявнополюсного синхронного генератора; 2) Для явнополюсного синхронного генератора; Неявнополюсный синхронный генератор Для простоты используем неявнополюсный синхронный генератор с ненасыщенной магнитной системой, для такого генератора можно построить векторную диаграмму напряжений, ЭДС и токов, которая представлена на (рис. 3.41 методичка). На векторной диаграмме совместно построена векторная диаграмма векторных потоков (пространственная векторная диаграмма). На основании Фрез = Фв + Фсинх (71). Фсинх создается потоком якоря и при ненасыщенной магнитной системе он совпадает с направлением тока I1Ю Вектор потока Фв откладывается в сторону опережения к вектору Е0. Фрез откладывается под углом 90 градусов в сторону опережения по отношению к вектору напряжения U1. Вектор Фсинх откладывается параллельно току I1.
Из точки А опустим перпендикуляр на вектор Е0, получим треугольник АВС, из этого треугольника найдем cos Ψ. cos 𝜓 = 𝐴𝐵 = 𝑈1 sin𝜃 (72) 𝐴𝐶 𝑰𝟏𝒙синх Катет АВ найдем через треугольник ОАВ АВ = 𝑈1 sin 𝜃 (73). Запишем выражение для активной мощности 𝑃 = 𝑚𝐸0𝐼1 cos 𝜑 = 𝑚 𝑥𝑈синх1𝐸0 sin 𝜃 (74). Выражение для активной мощности неявнополюсного синхронного генератора, где θ называется угол нагрузки. Этот угол можно объяснить двояко: 1) С точки зрения векторной диаграммы напряжений, это угол между вектором ЭДС Е0 и вектором напряжения U1; 2) С точки зрения пространственной векторной диаграммы потоков, угол θ это пространственный угол между осью полюсов индуктора и осью результирующего магнитного поля. Для того что бы изменить активную мощность генератора, отдаваемую в сеть, нужно при U1= const, Е0= const изменять угол θ. В синхронном генераторе результирующий магнитный поток остается неизменным, а изменение угла θ достигается поворотом индуктора относительно этого результирующего магнитного потока. Если необходимо увеличить активную мощность, отдаваемую генератору, то для этого надо увеличить угол нагрузки θ, что достигается перемещением индуктора относительно результирующего магнитного поля. За счет дополнительного внешнего момента, приложенного извне к его валу. Выведем аналитическое выражения для электромагнитного момента 𝑀 = Р эм = 𝑚𝐸0𝑈1 sin 𝜃 (75). В зависимости активной мощности электромагнитного момента при U1, Ω1 Ω1𝑥синх E0, f1 = const, называется угловыми характеристиками активной мощности и электромагнитного момента (рис. 3.42 методичка). Так как выражение для Р и М пропорционально углу θ, носят синусоидальный характер. Θ для номинального режима составляет 20-30 градусов. При θ=π/2 мощностный момент достигает максимального значения и равно 𝑃𝑚𝑎𝑥 = 𝑚 𝑥𝑈синх1𝐸0 , М𝑚𝑎𝑥 = Ω 𝑚1𝑈𝑥1синх𝐸0 (76). Отношение 𝐾п = Р𝑃 𝑚𝑎𝑥 ном = 𝑀 𝑚𝑎𝑥 (77) называется статической перегружаемостью работающего параллельно с сетью. 𝑀ном Увеличить активную мощность можно двумя способами: 1) Увеличением ЭДС Е0, увеличением тока синхронного генератора; 2) Увеличением индуктивного сопротивления. Для увеличения активной мощности и уменьшения Xсинх воздушный зазор необходимо увеличивать. Рассмотрим статическую устойчивость синхронного генератора на примере неявнополюсного синхронного генератора. Для этого воспользуемся угловой характеристик
|
||||||||||
|
|
Последнее изменение этой страницы: 2017-01-19; просмотров: 247; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.126 (0.014 с.) |

 (рис. 3.14, 3.15 методичка)
(рис. 3.14, 3.15 методичка)

 (39)
(39)


 Отношением тока короткого замыкания называется отношение тока короткого замыкания
Отношением тока короткого замыкания называется отношение тока короткого замыкания