Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Принцип максимуму ПонтрягінаСодержание книги
Поиск на нашем сайте 1956 року в роботах академіка Л.С. Понтрягіна та його учнів було обґрунтовано принцип максимуму як необхідна і достатня ознака оптимального процесу для лінійних систем і необхідна ознака для нелінійних систем. Між принципом максимуму і принципом оптимальності Беллмана існує прямий зв’язок. Розглянемо спочатку матеріальну точку масою m=1, яка вільно і без тертя рухається по горизонтальній прямій і має двигун, що розвиває силу Fд. Тоді рівняння руху точки мають вигляд: dS/dt = V; dV/dt = a; a = Fд, (10.41) де S, V, a – переміщення, швидкість і прискорення точки відповідно. Позначимо: y1 = S; y2 = V; u = Fд, і тоді запишемо рівняння (10.41) у вигляді:
Знайдемо оптимальне керування точкою, при якому вона перейде з початкового положення Sп до кінцевого положення Sк за мінімальний час, тобто I = T = min (функціонал 10.4). На керування накладають обмеження:
Інтегруючи рівняння (10.41) отримаємо:
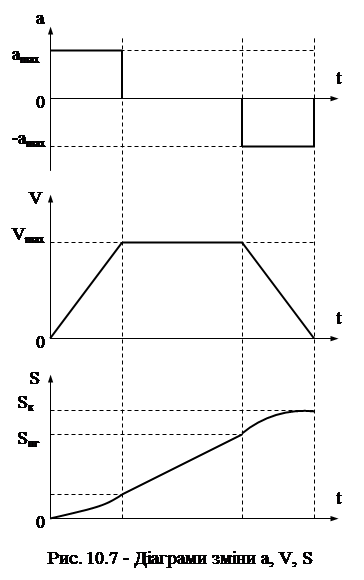
де Sп, Vп – початкові умови. Для виконання умови T=min, необхідно, аби середня швидкість руху на відрізку [Sп, Sк] була як можна більшою, тобто Побудуємо діаграми зміни a, V, S з урахуванням (10.43) і (10.44) за умови, що Vп = 0, Sп = 0 (рис. 10.7). Для точного влучення у точку Sк необхідно правильно вибрати точку початку гальмування. Визначимо для цього шлях гальмування Sг із умов:
Оскільки
Це є рівняння параболи. Якщо записати замість
Знак “мінус” ставиться при V > 0, знак “плюс” – при V < 0. Побудуємо залежність S=f(V) на фазовій площині з урахуванням обмежень Початок координат відповідає кінцевій точці Sк (зупинка руху).
Якщо точка знаходиться на ділянці фазової траєкторії 1-0-1¢, то для того, щоб точка влучила у задане положення, необхідно почати гальмування з максимальним сповільненням. Якщо точка знаходиться на ділянці 2-1 або 2¢-1¢, то гальмування слід починати тільки після досягнення точок 1 (1¢). До цього моменту швидкість повинна залишатися максимальною і постійною. Якщо гальмування починати, наприклад, у точці 3 (3¢), то тіло “проскочить” задане положення, влучивши у точку 4 (4¢). Тоді тіло слід розігнати на ділянці 4-5 (4¢-5¢) а потім гальмувати по лінії 5-0 (5¢-0¢). Якщо у початковий момент часу тіло знаходиться у точці 6 (6¢), то його слід спочатку розігнати до точки 7 (7¢), а потім гальмувати по лінії 7-0 (7¢-0). Таким чином, для досягнення максимальної швидкодії необхідно працювати на межі можливостей (за реальних умов це не завжди так, якщо запас енергії обмежений). Отже, фазовий портрет можна розділити на дві зони: - зона А, в якій швидкість V зростає, тобто а > 0; - зона В, в якій швидкість V знижується, тобто а < 0. Межа, що розділяє ці зони, називається лінією перемикання. За відомими рівнянням цієї лінії та станом системи X (швидкість V і положення відносно Sк), можна завжди визначити керуючий вплив:
Рівняння (10.45) можна записати у вигляді:
де Для зон А і В, відповідно, виконуються умови:
Тоді сигнал керування повинен мати вигляд:
Умова (10.49) виражає алгоритм керування, що реалізує оптимальні за швидкодією процеси у системі. Аналіз фазового портрета показує, що для переміщення з будь-якої точки Sп до заданої точки Sк керування змінюється максимум один раз або має одне перемикання (два інтервали). У точках перемикання u(t) має розрив першого роду. Такі керування належать до класу припустимих (рис. 10.3). Тепер перейдемо до розгляду принципу максимуму. Скористаємось рівнянням (10.36). Позначимо:
Оскільки max(-y) = -min(y) (рис. 10.9), то можна записати:
Отже, умову мінімуму інтегралу (10.35) запишемо у вигляді:
де Отриманий вираз (10.51) є математичним записом принципу максимуму Понтрягіна. Зазначимо, що під час застосування методу динамічного програмування у загальному випадку необхідно попередньо знайти функцію S, що пов’язано з розв’язком диференціальних рівнянь у частинних похідних. Використання принципу максимуму потребує знання вектора
Часто рівняння (10.51) і (10.52) записують у більш компактній формі, позначивши скалярний добуток векторів
де Узявши частинну похідну H за yі, отримаємо рівняння руху об’єкта:
Із виразу (10.53) можна зробити такі висновки: - якщо процес є оптимальним, то у будь-який момент часу t оптимальне керування u(t) – це таке керування, що максимізує величину Н; - у будь-якій точці оптимальної траєкторії максимальне значення величини Н одне й те саме: воно дорівнює нулю. Функцію Н називають функцією Гамільтона. Вона має визначений фізичний смисл. Зокрема для консервативних механічних систем функція Н є повною енергією системи, яка повинна залишатися постійною й максимальною у процесі керування. Функції yі є імпульсами і задають напрямок руху. Для неконсервативних систем, наприклад електричних, функція Н – потужність, а yі – також імпульси. Звідси випливає фізичний смисл оптимального керування: необхідно надавати об’єкту таку кількість енергії, яка забезпечувала б його рух, при якому функціонал, вибраний як критерій оптимальності, досягав би екстремального значення за обмежень, що накладені на фазові координати та керування. Ця енергія надається за допомогою керування u, тому Н є функцією також і від u. Таким чином, принцип максимуму в загальному випадку можна сформулювати так: Для отримання оптимальної системи, у смислі мінімуму функціоналу І, необхідне існування таких ненульових безперервних функцій y0(t), …, yn(t), які є розв’язком системи
Принцип максимуму є найдоцільнішим з усіх методів знаходження оптимальних керувань при розв’язуванні задач про швидкодію. Розв’язування задачі виконують у такій послідовності: 1. Складають функцію Гамільтона Н, що дорівнює скалярному добутку векторів 2. Беруть частинні похідні Н за керуванням ui, які визначають екстремум функції Н. У разі лінійної залежності Н від ui частинна похідна ui = umax ×sign yі(t). (10.56) Таким чином, у даному випадку керуючий вплив стрибком набуває значення +umax або -umax. Момент зміни знаку називається моментом перемикання. У разі нелінійної залежності Н від ui частинну похідну 3. Для знаходження допоміжної функції yі(t), яка визначає керування, складають і розв’язують систему спряжених рівнянь (10.54) 4. У разі замкнутої системи визначають залежність керування від вихідних координат системи, що визначають оптимальну траєкторію: У разі розімкнутої системи визначають кількість змін знаку yі(t), тобто визначають, скільки разів yі(t) переходить через нуль або інакше, скільки коренів має функція yі(t). Моменти перемикання можна визначити за методом стикування розв’язків диференціальних рівнянь зі знакозмінною правою частиною. Приклад 10.5 Система задана рівняннями (10.41),(10.42):
Необхідно розв’язати задачу про максимальну швидкодію, тобто знайти оптимальне керування u *, при якому перехід системи з початкового стану в кінцевий (рівноважний) стан відбувався б за мінімальний час. При цьому на керування накладається обмеження: | u | £ u max. Запишемо функцію Гамільтона:
Оскільки Н лінійна відносно u, то для визначення максимуму Н необхідно знайти y2. Запишемо систему спряжених рівнянь:
Звідси випливає: y1 = С1;
де С1,С2 – сталі інтегрування. Для досягнення максимуму Н необхідно, щоб y2 і u були одного знаку, тобто: u = umax×signy2. (10.57) Оскільки функція Принцип максимуму дає тільки якісну сторону зміни керуючої дії, тобто визначає кількість інтервалів керування, і не дає кількісної оцінки закону керування, оскільки сталі С1 і С2 не можна визначити через невідомі початкові умови для функції y(t). Це є його суттєвим недоліком. Для конструювання оптимального регулятора цього недостатньо. Необхідно обов’язково знати моменти перемикання керуючої дії. У даному прикладі у разі замкнутої системи це можна зробити, якщо знайти рівняння лінії перемикання (10.47):
або При цьому У разі розімкнутої системи моменти перемикання знаходять методом стикування розв’язків диференціальних рівнянь. У прикладі (10.5) маємо два інтервали часу (два інтервали керування). Тому необхідно знайти моменти часу: t1 – момент зміни знаку керування; T = t2 – закінчення керування. Нехай у початковий момент часу (t = t0 = 0) тіло знаходиться у точці В (рис. 10.10), тобто S(t0) = -S0 = -y10; Кінцеве значення координат: S(t2) = y1(t2)=0; При цьому з рис. 10.10 видно, що перший інтервал керування є додатним (u = +umax), а другий – від’ємним (u = -umax). Розв’язуємо диференціальне рівняння:
де С1 і С2 – сталі інтегрування. Після диференціювання отримуємо:
Запишемо рівняння (10.58) і (10.59) для різних моментів часу: - для t = t0 = 0 (початок першого інтервалу):
Звідси С10 = 0, С20 = -y10; - для t = t1 (кінець першого, початок другого інтервалу); оскільки функції
Звідси отримуємо: - для t = t2 = T (кінець другого інтервалу):
Звідси Дорівнюємо вирази для С11 , а також для С21. Тоді отримуємо відповідно:
Після підстановки першого рівняння до другого отримаємо:
Звідси знаходимо: - момент перемикання керування: - момент закінчення руху: У даному прикладі розглядали систему другого порядку і було отримане рівняння лінії перемикання. Розв’язуючи задачу для систем більш високих порядків, отримують рівняння поверхні перемикання у багатомірному фазовому просторі. При цьому кількість перемикань визначається відповідно до теореми про n-інтервалів, яку 1953 року довів у своїх роботах О.А.Фельдбаум: Якщо характеристичне рівняння системи n-го порядку має тільки дійсні недодатні корені (від’ємні та нульові), процес керування матиме не більше (n-1) перемикань. Якщо є комплексні корені (включаючи чисто уявні), то перемикань може бути більше залежно від початкових умов. Можна зробити висновок, що оптимальна за швидкодією система має релейний перемикаючий елемент, що керується за допомогою спеціального обчислювального пристрою. При цьому необхідно безперервно вимірювати всі n фазових координат, тобто регульовану величину і (n -1) її похідних і подавати інформацію на вхід обчислювального пристрою. Оскільки ідеальні диференціювальні ланки фізично не реалізуються, то для систем високого порядку можна здійснити лише близькі до оптимальних системи. Крім того, для систем високого порядку знаходження поверхонь перемикання є досить складною задачею, яка розв’язана лише для окремих випадків. Приклад 10.6 Визначити закон змінювання струму якоря двигуна постійного струму з незалежним збудженням, що забезпечує відпрацювання кутового переміщення q0 протягом мінімального часу Т при обмеженні струму якоря |i| £ іmax і статичному моменті Мс=0. Рівняння, що описують динаміку двигуна, мають вигляд:
де w - кутова швидкість двигуна; с – струмова стала двигуна; J – момент інерції електропривода. Позначимо: w = y1, q = y2, i = u. Тоді рівняння двигуна матимуть вигляд:
за початкових умов y1(0) = 0, y2(0) = 0 і при кінцевих значеннях змінних y1(Т) = 0, y2(Т) = q0. Складаємо функцію Гамільтона: Функція Н лінійна відносно u. Запишемо систему спряжених рівнянь:
Звідси отримуємо: y2 = С2; де С1 і С2 – сталі інтегрування. Для досягнення максимуму Н необхідно, щоб y1 і u були одного знаку, тобто u = umax×signy1 = іmax×signy1= іmax×sign(C1 - C2t). Функція
Визначимо момент перемикання t1. Для цього використаємо перше рівняння системи (10.63). На першій ділянці при t < t1 керування u = imax, тому dy1/dt = cimax/J. За початкових умов y1(0) = 0 отримуємо розв’язок цього рівняння:
При t = t1 швидкість у кінці першої ділянки обчислюється за формулою:
На другій ділянці при t ³ t1 керування u = - іmax, тому dy1/dt = -cimax/J. Розв’язок цього рівняння знаходимо за формулою:
Сталу інтегрування С3 визначимо з умови, що функція y1(t) при t = t1 безперервна і на другій ділянці слушна формула (10.66). Тоді отримуємо:
При t = T маємо y1(T) = 0, тобто Час Т визначимо з умови, що за цей час кутове переміщення дорівнює q0. Тоді з другого рівняння системи (10.63) маємо:
звідки знаходимо:
З урахуванням позначень струму якоря і кутової швидкості запишемо закони їх змінювання під час відпрацювання двигуном заданого переміщення:
Закон змінювання напруги на якорі можна визначити з рівняння: uя = іR + cw. Цей закон має вигляд:
|
|||||
|
|
Последнее изменение этой страницы: 2016-12-27; просмотров: 319; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.214 (0.009 с.) |

 (10.42)
(10.42) (10.43)
(10.43) (10.44)
(10.44)

 де
де  - час гальмування, переміщення і швидкість точки у початку гальмування.
- час гальмування, переміщення і швидкість точки у початку гальмування.
 то
то (10.45)
(10.45) відповідно S, V – поточні координати початку гальмування, то рівняння (10.45) можна записати у вигляді:
відповідно S, V – поточні координати початку гальмування, то рівняння (10.45) можна записати у вигляді: (10.46)
(10.46) (рис. 10.8).
(рис. 10.8).
 .
. , при |V| < Vmax, або
, при |V| < Vmax, або при |V| < Vmax, (10.47)
при |V| < Vmax, (10.47) (10.48)
(10.48)

 (10.49)
(10.49) , тоді вектор
, тоді вектор  запишемо:
запишемо:

 або
або (10.50)
(10.50) (10.51)
(10.51) - скалярний добуток двох векторів.
- скалярний добуток двох векторів. (10.52)
(10.52) (10.53)
(10.53) (10.54)
(10.54)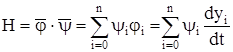 (з урахуванням того, що
(з урахуванням того, що  ).
). (10.55)
(10.55)
 причому
причому  .
. є функцією однієї або декількох складових вектора
є функцією однієї або декількох складових вектора  При цьому моменти перемикання визначаються автоматично при відхиленні фактичної траєкторії від оптимальної.
При цьому моменти перемикання визначаються автоматично при відхиленні фактичної траєкторії від оптимальної.




 має один корінь t1=C2/C1, то керування u має одну зміну знаку (два інтервали керування), що співпадає з раніше отриманим результатом (рис. 10.8). Після закінчення керування
має один корінь t1=C2/C1, то керування u має одну зміну знаку (два інтервали керування), що співпадає з раніше отриманим результатом (рис. 10.8). Після закінчення керування  (рис.10.10).
(рис.10.10).




 тобто рівняння зі знакозмінною правою частиною. Характеристичне рівняння: s2 = 0, тобто маємо два нульових кратних кореня s1=s2=0. Тоді розв’язок має вигляд:
тобто рівняння зі знакозмінною правою частиною. Характеристичне рівняння: s2 = 0, тобто маємо два нульових кратних кореня s1=s2=0. Тоді розв’язок має вигляд: (10.58)
(10.58) (10.59)
(10.59)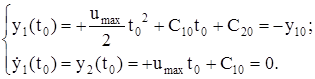 (10.60)
(10.60) безперервні, то можна виконати стикування розв’язків на межі першого і другого інтервалів:
безперервні, то можна виконати стикування розв’язків на межі першого і другого інтервалів: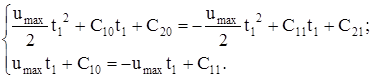 (10.61)
(10.61)
 (10.62)
(10.62)
 або t2 = T = 2t1;
або t2 = T = 2t1;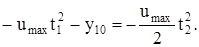




 (10.63)
(10.63)
 (10.64)
(10.64)
 має один корінь t1=C1/C2, тому керування u має одну зміну знаку:
має один корінь t1=C1/C2, тому керування u має одну зміну знаку: (10.65)
(10.65)
 (10.66)
(10.66)

 звідки t1= T/2.
звідки t1= T/2. або
або