
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Математическая модель объекта оптимизацииСодержание книги
Похожие статьи вашей тематики
Поиск на нашем сайте
Система параметров вместе с системой ограничений и критериев качества образует математическую модель объекта оптимизации. Моделирование (т.е. представление явления в удобном для изучения виде) лежит в основе практически любой науки. Содержание понятия "модель", "моделирование" в различных сферах знаний весьма разнообразно. Однако есть и общее: модель в том или ином смысле, более или менее полно имитирует оригинал - моделируемый объект. Будем говорить, что объект “б” является моделью объекта “а” (здесь термин “объект” понимается в более широком смысле: объектами могут быть любые ситуации, явления, процессы) относительно некоторой системы “s” характеристик, если “б” строится (или выбирается) для имитации “а” по этим характеристикам. Модель может быть построена как для изучения этих характеристик (исследовательские модели), так и для их непосредственного использования (рабочие модели: автопилот, протез и т.д.). Исследовательские модели можно условно разделить на экспериментальные (предметные) и теоретические. Теоретические (умозрительные) модели формулируются на языке определенной науки. В зависимости от характера этого языка можно говорить о математической, экономической, экономико-математической и других моделях. В наших случаях умозрительная физическая модель представлена обычно схематическим чертежом и называется расчетной схемой (при динамических исследованиях динамической моделью) - это идеализированное отображение рассматриваемой системы, используемое при ее теоретическом исследовании и инженерных расчетах. Важнейшим требованием к модели является требование ее адекватности изучаемому реальному объекту (процессу и т.д.) относительно избранной системы его характеристик. Под этим обычно понимается: а) правильное качественное описание объекта по выбранным характеристикам; б) правильное количественное описание объекта по выбранным характеристикам с некоторой разумной степенью точности. Применительно к подъемно-транспортным машинам и их узлам нужно обращать внимание на следующее. Ограничения на параметры, определяющие диапазоны их варьирования при оптимизации, должны быть установлены после анализа аналогичных отечественных и зарубежных изделий в возможно более полной номенклатуре. Это же касается отбора структур при структурно-схемной оптимизации. Например, при установлении диапазонов значений параметров сочлененных стрел на кафедре ПТСМ СПбГТУ были проанализированы данные о 14 типоразмерах портальных кранов отечественных и иностранных фирм последних лет выпуска и перспективные разработки промышленности. При установлении перспективных типов стреловых систем и порталов были изучены данные более чем 250 типоразмеров кранов. Перспективные схемы канатных подвесов груза, способствующих уменьшению раскачиваний груза, определены на основе анализа опыта промышленности, материалов литературных источников и более 200 патентов и авторских свидетельств. Расчетные нагрузки, входящие в ограничения по прочности, должны назначаться с учетом данных о фактической нагруженности соответствующих узлов в реальных условиях эксплуатации. Так, нагрузки для расчета стрел портальных кранов задаются с учетом результатов эксплуатационных испытаний аналогичных кранов. Эти исследования в свое время были выполнены в шести портах на 11 кранах, при этом было сделано и обработано свыше 1,5 млн. замеров напряжений с помощью тензодатчиков. Исследование нагруженности кранов, тензометрические испытания их в условиях эксплуатации продолжаются и сегодня, что позволяет корректировать соответствующие методики расчета. Ограничения на критерии качества (допускаемые прогибы и время затухания колебаний мостов и стрел, негоризонтальность траектории груза для стрел и т.д.) должны разрабатываться на базе подробного анализа реальных условий нормального функционирования объекта в эксплуатации. Методика определения напряжений, принимаемая при формировании ограничений по прочности, должна быть подтверждена физическим экспериментом. Остановимся подробнее на этом последнем обстоятельстве. В ограничениях Подчеркнем, что адекватность модели следует рассматривать только по определенным признакам, характеристикам, принятом в данном исследовании за основные. Если такие характеристики не указаны, то они должны подразумеваться. Не существует универсальной адекватности, ибо такая адекватность означала бы тождество модели и объекта. Можно выделить следующие основные этапы разработки модели объекта при оптимизационных и других исследованиях. 1. Изучение моделируемого явления, формулировка технических требований к объекту и на их основе - целей исследования (формулирование проблемы). 2. 3. Построение концепции о поведении объекта в соответствии с данными, полученными на 1-м и 2-м этапах на основе анализа имеющейся информации (технической документации и экспериментальных данных). 4. Составление возможно более полной структуры объекта в соответствии с разработанной на 3-м этапе концепцией. 5. Разбиение структуры на подсистемы (блоки), поддающиеся элементарной количественной оценке известными методами, и вычисление соответствующих характеристик (декомпозиция). 6. Сравнительный анализ характеристик подсистем с точки зрения технических требований, целей исследования и разработанной концепции; принятие решений о значении отдельных подсистем с указанной точки зрения, о возможности исключения отдельных подсистем или об объединении нескольких подсистем в эквивалентную подсистему (агрегатирование). 7. Математическое описание агрегатированной структуры - разработка математической модели объекта. 8. Оценка адекватности модели. При решении задач оптимизации специальных машин должны применяться основные принципы системного подхода, которые сводятся к целенаправленности (цель работы - обеспечение эффективности функционирования машины), относительности (при расчетах каждый элемент рассматривается как часть цельного), моделируемости. Системой называется совокупность, образованная (и упорядоченная по определенным правилам) из конечного множества элементов. При этом между элементами системы существуют определенные отношения. Элемент и система являются относительными понятиями. Например грузоподъемный кран - это система, образованная своими элементами, в то же время он может быть элементом порта, системы “человек - машина - окружающая среда”. Для выяснения связи между элементами крана рассмотрим его динамическую модель, как наиболее общую. Структура динамической модели может быть показана с помощью графа (схемы). Будем использовать неориентированные графы, структура которых аналогична структуре исследуемой модели. Граф состоит из элементов системы, изображаемых окружностями, связанными между собой дугами, которые означают, что элементы системы имеют между собой связь. Эта связь может осуществляться за счет сил упругости, инерции; в связь могут быть включены элементы демпфирования. Над дугами могут быть графические символы, указывающие вид связи. Этот вид графа позволяет графически иллюстрировать динамическую модель с любой степенью дискредитации и делать качественные выводы о характере связей между элементами системы. Пример графа динамической модели грузоподъемных кранов приведен на рис.2.8. Кран с грузом на гибком подвесе в общем случае представляет собой компоновочно-конструктивное объединение ряда подсистем-двигателей, передаточных механизмов, металлической конструкции, грузозахватного устройства. Каждую из указанных подсистем можно разбить на более мелкие блоки, которые имеют различные конструктивные исполнения. Такие подсистемы часто проектируются, исследуются и испытываются отдельно (с учетом, безусловно, компоновочных связей). Характеристики каждой из подсистем крана можно определять расчетным или экспериментальным путем. Получение таких характеристик значительно проще, чем для целого крана. Если не изучаются процессы взаимодействия грузозахватного органа (ГЗ) и перегружаемого материала (Г) (взаимодействие грейфера и перегружаемого материала, электромагнита и груза), то узлы ГЗ и Г на рис.2.8 могут быть объединены. Будем рассматривать кран, имеющий четыре механизма: механизм подъема (МПД), механизм передвижения крана (МПК), механизм вращения крана (МВР), механизм изменения вылета (МИВ) или механизм передвижения тележки (МПТ). В этом случае кран будет иметь четыре степени подвижности. Двигатели являются теми функциональными частями машины, в которых происходят процессы преобразования энергии. В любом двигателе можно выделить входные параметры, управляющие этими процессами, и выходное звено, совершающее обычно вращательное движение. Структура крана (кранового механизма) существенно зависит от характера соединения двигателей. Для крановых механизмов наибольшее распространение имеют однодвигательные агрегаты, в которых используются двигатели с одним входным параметром. В многодвигательных машинах или механизмах двигатели могут устанавливаться независимо или связываться между собой по выходу или входу.
Рис.2.8. Динамический граф грузоподъемных кранов
При связи двигателей по выходу соединяют выходные звенья нескольких двигателей (например, лебедки механизма подъема литейных кранов). Чаще всего эта схема используется для повышения надежности работы механизма. В этом случае с функциональной точки зрения получают двигатель с одним выходом и несколькими входами. Связь двигателей по входу осуществляется обычно в виде “электрического вала”, обеспечивающего либо строгую синхронизацию движений выходных звеньев, либо выравнивание обобщенных движущих сил (например, механизмы передвижения кранов мостового типа с большими пролетами). Кран (граф которого см. на рис.2.8) является примером многодвигательной машины с независимыми двигателями. В этом случае динамическая связанность двигателей осуществляется через приводимую в движение машину. Так, при работе механизма вращения крана груз отклоняется и в плоскости стреловой системы и нагружает двигатель механизма изменения вылета. Механическая часть крана состоит из передаточных механизмов (ПМ) и металлоконструкции (МК). Это разбиение представляется удобным как с точки зрения анализа и синтеза крана, так и с точки зрения проектирования. Функционально механическая часть крана служит для преобразования движений выходных звеньев двигателей в движения исполнительных органов, служащих для перемещения точки подвеса груза на канатах (мост крана, стрела, барабан), требующееся для выполнения рабочих процессов (перемещение груза, черпания материала грейфером). Передаточный механизм (ПМ) предназначен для передачи движения от двигателя к МК крана (от двигателя к колесам крана, от двигателя к стреле) или непосредственно к исполнительному органу (барабану механизма подъема). Он может быть связан с металлоконструкцией как жесткой, так и гибкой связью (полиспастный механизм изменения вылета, механизм передвижения с канатной тягой). Двигатель (Д) и передаточный механизм (ПМ) образуют крановый механизм в обычном понимании. Механизм и часть металлической конструкции крана образуют ряд крановых подсистем: подъема (СПД), передвижения крана (СПК), вращения крана (СВР), изменения вылета (СИВ) или передвижения тележки (СПТ). Идея выделения крановой МК в отдельную подсистему состоит в том, что при работе различных механизмов динамический отклик получают отдельные части МК. Этот вопрос тесно связан с расчетными комбинациями нагрузок, по которым в настоящее время в большинстве случаев ведется проектировочный расчет. В зависимости от того, какой механизм работает, возможны различные степени детализации крановой МК. Представление модели крана в виде графа позволяет в наглядной форме вскрыть структурные особенности системы и сделать продуктивные выводы о качественных особенностях процесса. Методы оптимизации Параметры, доставляющие экстремум целевой функции при выполнении ограничений, находят с помощью какого-либо метода вычислительной (прикладной) математики. Эти методы разделяют на две большие группы: 1) аналитические методы (прямое исследование целевой функции на экстремум, метод множителей Лангранжа, метода вариационного исчисления); 2) численные методы, когда оптимальные параметры определяют с помощью некоторой итерационной процедуры (последовательными приближениями). Ввиду сложности целевых функций и ограничений в инженерных задачах оптимизации наибольшее применение находят численные методы. Среди них следует выделить следующие методы: а) нелинейного программирования, разработанные для нелинейных целевых функций при линейных и (или) нелинейных ограничениях; б) линейного программирования, разработанные для линейных целевых функций при линейных ограничениях. (Слово “программирование” в этих определениях не означает “составление вычислительных программ”). Мы рассмотрим аналитическое решение некоторых задач оптимизации и отдельные методы нелинейного программирования.
Аналитические методы Прямое исследование целевой функции на экстремум. Рассмотрим задачу об оптимальных параметрах коробчатого сечения балки, работающего на изгиб. Пусть требуется определить значения оптимальных параметров h, b, dП, dС коробчатого сечения (см. рис. 2.2,а), доставляющие минимум его площади при выполнении ограничений по прочности, поясненных в разд. 5:
Из условия Имеем задачу о минимизации площади Найдем
Таким образом, теоретический оптимум достигается при поясах и стенках, имеющих бесконечные размеры и нулевые толщины. Этот парадоксальный результат получился потому, что в систему ограничений не были включены ограничения по местной устойчивости. Для отыскания реального оптимума зафиксируем толщину стенки по условиям местной устойчивости, не рассматриваемым здесь подробно, или по технологическим соображениям. При этом достигается минимум площади сечения, равный qmin = 3,27 Рассмотрим задачу об оптимальной форме статически неопределимой балки. Требуется определить оптимальную форму (распределение материала по длине) дважды защемленной балки коробчатого сечения, нагруженной силой P в середине пролета (рис.2.9,а). Если учесть симметрию нагружения симметричной балки и пренебречь влиянием продольных сил, то балка будет один раз статически неопределимой относительно моментов Mв защемлениях. Эпюра поперечных сил Q, приведенная на рис.2.9,б, не зависит от формы симметричной балки. Эпюра изгибающих моментов (рис.2.9,а) будет состоять из двух прямолинейных участков, имеющих тангенсы углов наклона, равные Q =
Рис.2.9. К расчету оптимальной формы статически неопределимой балки
Совершенно очевидно, что из всех балок с эпюрой изгибающих моментов, показанной на рис.2.9,в, самой легкой будет балка, очертания которой максимально приближаются к форме равного сопротивления, т.е. статически определимая разрезная балка (см. рис. 2.9,е) с двумя шарнирами в пролете, причем расположение шарниров определяется координатой Z. На рис. 2.9,ж показана оптимальная (по массе) форма такой балки. Высоту h в сечении с координатой Х можно найти из выражения для оптимальной высоты коробчатого сечения (см. выше) h = Ми = 0,5Р(Z - X) при 0 Ми = 0,5Р(X - Z) при Z Минимальная площадь коробчатого сечения, нагруженного моментом Ми , равна F = 3,27 V = = = Найдем значение Z, доставляющее минимум объема V:
Этому отвечает минимум объема балки, равный V = Оптимальная форма балки при Z = 0,25L приведена на рис. 2.9,з. Такую же эпюру изгибающих моментов при Z = 0,25 L имеет балка постоянного сечения, показанная (см. рис. 2.9з) штриховой линией. Минимальный объем такой балки равен V* = 3,27L т.е. в 1,5 раза больше, чем при оптимальной форме. Если учесть влияние поперечных сил, то форму балки следует откорректировать по рис. 2.9,и. Заметим, что подобный подход применим для отыскания оптимальных форм других видов статически неопределимых балок и рам (см. рис.2,а). Для рамы, показанной на рис.2.10,б с двумя шарнирами в ригеле, оптимизируемым параметром будет координата Z шарнира (в данном случае функция объема V(Z) в интервале 0 Рама, показанная на рис. 2.10,б геометрически изменяема. На ее основе можно получить геометрически неизменяемую форму (см. рис.2.10,б штриховую линию) и одновременно учесть влияние поперечных сил. При этом для сохранения эпюры изгибающих моментов с координатой безмоментной точки необходимо удовлетворить каноническому уравнению метода сил d11H + d1P = 0, причем (рис.2.10,в,г) d11 =
Данное условие есть ограничение по равенству.
|
||
|
|
Последнее изменение этой страницы: 2016-12-11; просмотров: 701; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.113 (0.011 с.) |

 и
и  (см. пункт 5) при оптимизации сечений коробчатых стрел предполагается определение действующих напряжений по формулам сопротивления материалов. Между тем эксперимент на металлических моделях и натурной конструкции показывает, что в углах сечения у шарнира стрела - рейка перенапряжения могут достигать 40%, а в середине пояса без отверстия наблюдаются провалы эпюры напряжений (рис. 2.7). Учесть эти факторы можно с привлечением более совершенного аппарата теории упругости. Но такая постановка задачи значительно усложняет решение, и применять ее в ограничениях для оптимизации нецелесообразно, во-первых, потому, что указанные особенности будут примерно в равной степени проявляться для всех вариантов, из которых будет выбираться решение, во-вторых, потому, что эти перенапряжения перекрываются коэффициентом запаса прочности. Поэтому при оптимизации целесообразно ограничиться учетом основных, доминирующих факторов, а уточненные расчеты выполнять при необходимости на основе уже полученных параметров конструкции, придавая этим расчетам поверочный (а не проектировочный)
(см. пункт 5) при оптимизации сечений коробчатых стрел предполагается определение действующих напряжений по формулам сопротивления материалов. Между тем эксперимент на металлических моделях и натурной конструкции показывает, что в углах сечения у шарнира стрела - рейка перенапряжения могут достигать 40%, а в середине пояса без отверстия наблюдаются провалы эпюры напряжений (рис. 2.7). Учесть эти факторы можно с привлечением более совершенного аппарата теории упругости. Но такая постановка задачи значительно усложняет решение, и применять ее в ограничениях для оптимизации нецелесообразно, во-первых, потому, что указанные особенности будут примерно в равной степени проявляться для всех вариантов, из которых будет выбираться решение, во-вторых, потому, что эти перенапряжения перекрываются коэффициентом запаса прочности. Поэтому при оптимизации целесообразно ограничиться учетом основных, доминирующих факторов, а уточненные расчеты выполнять при необходимости на основе уже полученных параметров конструкции, придавая этим расчетам поверочный (а не проектировочный)  характер.
характер. Выявление факторов, влияющих на выполнение объектом технических требований, и воздействий, препятствующих или способствующих нормальному функционированию.
Выявление факторов, влияющих на выполнение объектом технических требований, и воздействий, препятствующих или способствующих нормальному функционированию.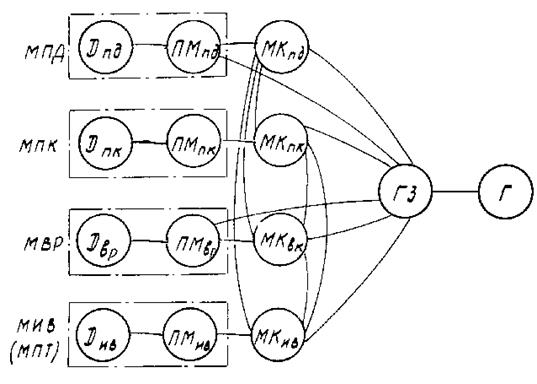
 ;
;  . Целевая функция имеет вид
. Целевая функция имеет вид  .
. имеем
имеем  . Подставив в это выражение
. Подставив в это выражение  , найдем
, найдем  .
. 
 коробчатого сечения при заданных моментах сопротивления
коробчатого сечения при заданных моментах сопротивления  и
и  . Имея в виду, что
. Имея в виду, что 

 ,
,  (без учета свесов поясов), можно получить
(без учета свесов поясов), можно получить  .
. , обеспечивающие экстремум
, обеспечивающие экстремум  ; - 1.5
; - 1.5  z/h2 = 0; h =
z/h2 = 0; h =  ;
; ; =1.5 Wy/b2 = 0; b =
; =1.5 Wy/b2 = 0; b = 

 Тогда q = 2Wz/h + 4hdc/3;
Тогда q = 2Wz/h + 4hdc/3;  q/
q/  При этом значении h можно получить для оптимального случая из ограничений
При этом значении h можно получить для оптимального случая из ограничений  = 0 и
= 0 и  = 0: b
= 0: b  =
=  ; b =
; b =  ;
;  .
. .
. 0.5 P, и ординаты на концах, равные М. Значение моментов М зависит от формы балки и имеет пределы изменения от нуля (балка с шарнирными опорами рис.2.9,г) до 0.25 PL (балка с шарниром в середине пролета рис.2.9,д). Эпюра по рис.2.9,в характеризует наиболее общий случай. Эта эпюра вполне определяется координатой Z безмоментной точки. Величину Z примем за оптимизируемый параметр.
0.5 P, и ординаты на концах, равные М. Значение моментов М зависит от формы балки и имеет пределы изменения от нуля (балка с шарнирными опорами рис.2.9,г) до 0.25 PL (балка с шарниром в середине пролета рис.2.9,д). Эпюра по рис.2.9,в характеризует наиболее общий случай. Эта эпюра вполне определяется координатой Z безмоментной точки. Величину Z примем за оптимизируемый параметр.
 , причем абсолютная величина изгибающего момента равна
, причем абсолютная величина изгибающего момента равна Х
Х  .Минимальный объем балки (целевую функцию для оптимизации параметра Z) вычисляем с помощью выражения
.Минимальный объем балки (целевую функцию для оптимизации параметра Z) вычисляем с помощью выражения =
=
 .
. 1,5
1,5  ; z= 0,25L.
; z= 0,25L. .
. ,
, ; d1Р =
; d1Р =  ; Н =
; Н =  , где J1(x) и J2(x) – функции изменения момента инерции сечения по длине стоек и ригеля. Подставив значения d11, d 1Р и Н в каноническое уравнение, получим
, где J1(x) и J2(x) – функции изменения момента инерции сечения по длине стоек и ригеля. Подставив значения d11, d 1Р и Н в каноническое уравнение, получим ;
;  .
.


