
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Кинематический и силовой расчеты рычажного шестизвенникаСодержание книги
Похожие статьи вашей тематики
Поиск на нашем сайте
ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ОБРАЗОВАНИЮ РФ ГОСУДАРСТВЕННОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ «ТЮМЕНСКИЙ ГОСУДАРСТВЕННЫЙ НЕФТЕГАЗОВЫЙ УНИВЕРСИТЕТ» ИНСТИТУТ ТРАНСПОРТА
Кафедра Детали машин
КИНЕМАТИЧЕСКИЙ И СИЛОВОЙ РАСЧЕТЫ РЫЧАЖНОГО ШЕСТИЗВЕННИКА
МЕТОДИЧЕСКИЕ УКАЗАНИЯ
к расчетно-графической работе по Теории механизмов и машин для студентов специальностей НР-130503, ПСТ-130501, НБ-130504, МОП-130602, АТХ-190601, СТЭ-190603, ПДМ-190205, СП-150202, ПТИ-260703, ТМ-151001, МКC-151002, МХП-240801, МСО-190207 очной полной и сокращенной форм обучения
Тюмень 2009 Утверждено редакционно-издательским советом Тюменского государственного нефтегазового университета
Составители: доцент, к.т.н. Никитина Любовь Ивановна ассистент, Панков Дмитрий Николаевич
© государственное образовательное учреждение высшего профессионального образования «Тюменский государственный нефтегазовый университет» 2009 г Введение
Методические указания «Кинематический и силовой расчеты рычажного шестизвенника» используются при выполнении расчетно-графической работы по теории механизмов и машин. В них рассмотрены следующие вопросы: структурный анализ механизма, определение скоростей и ускорений отдельных точек и звеньев механизма, силовой расчет, построение рычага Жуковского Н.Е. Приводятся схемы, формулы, алгоритмы решения задач. Методические указания предназначены для студентов технических специальностей очной полной и сокращенной формы обучения.
Задание на расчетно-графическую работу 1. Число оборотов кривошипа 2. Размеры звеньев: О1А=0,15 м, АВ=0,2 м, ВС=0,5 м, ВО2=0,185 м. Центры масс звеньев расположены по середине соответствующих звеньев. 3. Массы звеньев: m1=1,5 кг, m2=2 кг, m3 = 2 кг, m4=5 кг, m5 = 5 кг. 4. Момент инерции относительно оси, проходящей через центр масс звена: 5. Рабочие усилие: F=40 Н. Структурный анализ механизма Структурная схема механизма.
Звенья механизма.
Кинематические пары.
Число одноподвижных кинематических пар p1=7, число двух подвижных кинематических пар р2=0.
Строение групп Ассура. Последняя группа Ассура.
II класс, 2 порядок, вид ВВП. Степень подвижности: Структурная формула: Начальный механизм.
I класс Степень подвижности Структурная формула:
Силовой расчет механизма
Пояснительная записка. Пояснительная записка - документ, содержащий описание исследуемого механизма, обоснования принятых при его разработке методов исследования и технических решений, все виды расчетов, схемы, таблицы, поясняющие расчеты и принятые решения. Пояснительная записка расчетно-графической работы должна содержать: 1. Титульный лист (приложение 1); 2. Задание на расчетно-графическую работу; 3. Введение; 4. Содержание; 5. Структурный анализ механизма; 6. Кинематический анализ механизма: 6.1. Определение скоростей точек звеньев и угловых скоростей звеньев; 6.2. Определение ускорений точек звеньев и угловых ускорений звеньев; 7. Силовой расчет механизма; 8. Расчет уравновешивающей силы с помощью рычага Жуковского Н.Е..
5.2. Общие требования к оформлению пояснительной записки. Текстовые документы расчетно-графической работы должны быть сброшюрованы по ГОСТ 2.301-68. Титульный лист выполняется на бумаге формата А4 по ГОСТ 2.301-68 и должен соответствовать указанному ниже образцу. Текст записки должен быть набран в текстовом редакторе Microsoft Word. Шрифт пояснительной записки - Times New Roman, размер шрифта 14 с полуторным межстрочным интервалом. Выравнивание - по ширине. Ориентация страницы - книжная. Листы записки должны иметь рамку и штамп с основной надписью. Текст записки пишется в рамку, образованную полями: левое – 20 мм, правое – 5 мм, верхнее – 5 мм, нижнее – 5 мм. Основную надпись на листах пояснительной записки выполняют по ГОСТ 2.104-68. и ГОСТ 2.105-95. Примеры заполнения основной надписи первого листа пояснительной записки расчетно-графической работы и основной надписи последующих листов даны ниже (приложение 2). Заголовки всех разделов выделяют в отдельную строку и выполняют прописными буквами. Все разделы, подразделы, пункты, подпункты нумеруют и оформляют согласно требованиям ГОСТ 2.105-75 следующим образом, например: 1.3.4.6 - где 1 -номер раздела, 3 - подраздела, 4 - пункта, 6 - подпункта. Разделы «Введение», «Задание», «Содержание» - не нумеруют. Очередной раздел необходимо начинать с новой страницы. В конце подразделов результаты расчетов надо свести в таблицы, где привести значения, полученные в результате аналитических и графических расчетов. Раздел «Содержание» должен содержать названия разделов и подразделов с указанием страниц.
5.3. Правила оформления формул. 1. Нумеруют только те формулы, на которые имеются ссылки по тексту. Номер формулы заключается в круглые скобки с выравниванием по правому краю. 2. Расчетные формулы записывают сначала в символьном виде, затем в них подставляют цифровые значения физических величин и, наконец, приводят окончательный ответ с обязательным указанием размерности, например,
5.4. Правила оформления графических построений. 1. Все рисунки и графики должны быть озаглавлены и пронумерованы по ГОСТ 7.32-2001. 2. Графические построения следует выполнять карандашом в соответствии с ГОСТ 2.105-95 и ГОСТ 2.106-96. 3. Каждый лист должен иметь основные надписи по ГОСТ 2.104-68 (приложение 2). 4. Все построения необходимо снабжать соответствующей им надписью и масштабным коэффициентом. 5. Масштабные коэффициенты построений следует выбирать так, чтобы площадь листа была максимально заполненной. 6. Кинематическая схема механизма: 6.1. В расчетном положении кинематическую схему механизма надо выполнять основными линиями, указать масштаб; 6.2. Кинематические пары следует обозначать заглавными буквами латинского алфавита, центры масс звеньев буквами «S» с индексами, соответствующими номеру звена; 6.3. Для расчетного положения механизма указывать номера звеньев и направления угловых скоростей и ускорений, полученные на основании расчетов. 7. Планы скоростей и ускорений: 7.1. Концы векторов скоростей (ускорений) точек механизма следует обозначать малыми буквами латинского алфавита в соответствии с буквами на плане механизма; 7.2. Направления абсолютных и относительных скоростей (ускорений) надо показывать стрелками. 8. Планы сил: 8.1. Группы Ассура следует выполнять в масштабе; 8.2. Векторы сил необходимо изображать в истинном направлении; 8.3. Каждый вектор надо снабжать соответствующим обозначением; 8.4. Планы сил необходимо строить в масштабе.
Приложение 1
ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ОБРАЗОВАНИЮ Государственное образовательное учреждение высшего профессионального образования «Тюменский государственный нефтегазовый университет» Институт транспорта
Кафедра «Детали машин»
ПОЯСНИТЕЛЬНАЯ ЗАПИСКА к расчетно-графической работе по ТММ на тему: «Расчет главного механизма высадочной машины» Вариант 09-05.
Выполнил: студент группы АТХ-04-1 Иванов А.С.
Проверил: к.т.н., доцент Никитина Л.И.
Тюмень, 2007г. Приложение 2
Расчетно-графической работы
Расчетно-графической работы
Расположение схем и
Приложение 3 планов на формате А1
Приложение 4 Основные формулы для определения скоростей и ускорений точек звеньев
Рекомендуемая основная литература 1. Смелягин А.И. Теория механизмов и машин.- Новосибирск: Изд-во НГТУ, 2003. 2. Теория механизмов и машин. Под ред. К.В. Фролова.- М.: Высшая школа, 2002. 3. Левитинский Н.И. Теория механизмов и машин.- М.: Наука,1990. 4. Артоболевский И.И. Теория механизмов и машин.- М.: Наука,1988. 5. Попов С.А. Курсовое проектирование по теории машин и механизмов.- М.: Высшая школа, 1986. 6. Марголин Ш.Ф. Теория механизмов и машин.- Минск: Вышэйшая школа, 1978.
Рекомендуемая дополнительная литература 1. Заблонский К. И. Теория механизмов и машин. Киев: Высшая школа, 1989. 2. Теория механизмов. Под ред. В.А. Гавриленко. М.: Высшая школа, 1973.
Содержание
Стр.
Методические указания к расчетно-графическим работам по Теории механизмов и машин для студентов специальностей НР, ПСТ, НБ, МОП, АТХ, СТЭ, ПДМ, СП, ПТИ, ТМ, МКC, МХП, МСО___очной полной и сокращенной форм обучения
ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ОБРАЗОВАНИЮ РФ ГОСУДАРСТВЕННОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ «ТЮМЕНСКИЙ ГОСУДАРСТВЕННЫЙ НЕФТЕГАЗОВЫЙ УНИВЕРСИТЕТ» ИНСТИТУТ ТРАНСПОРТА
Кафедра Детали машин
КИНЕМАТИЧЕСКИЙ И СИЛОВОЙ РАСЧЕТЫ РЫЧАЖНОГО ШЕСТИЗВЕННИКА
МЕТОДИЧЕСКИЕ УКАЗАНИЯ
к расчетно-графической работе по Теории механизмов и машин для студентов специальностей НР-130503, ПСТ-130501, НБ-130504, МОП-130602, АТХ-190601, СТЭ-190603, ПДМ-190205, СП-150202, ПТИ-260703, ТМ-151001, МКC-151002, МХП-240801, МСО-190207 очной полной и сокращенной форм обучения
Тюмень 2009 Утверждено редакционно-издательским советом Тюменского государственного нефтегазового университета
Составители: доцент, к.т.н. Никитина Любовь Ивановна ассистент, Панков Дмитрий Николаевич
© государственное образовательное учреждение высшего профессионального образования «Тюменский государственный нефтегазовый университет» 2009 г Введение
Методические указания «Кинематический и силовой расчеты рычажного шестизвенника» используются при выполнении расчетно-графической работы по теории механизмов и машин. В них рассмотрены следующие вопросы: структурный анализ механизма, определение скоростей и ускорений отдельных точек и звеньев механизма, силовой расчет, построение рычага Жуковского Н.Е. Приводятся схемы, формулы, алгоритмы решения задач. Методические указания предназначены для студентов технических специальностей очной полной и сокращенной формы обучения.
Задание на расчетно-графическую работу 1. Число оборотов кривошипа 2. Размеры звеньев: О1А=0,15 м, АВ=0,2 м, ВС=0,5 м, ВО2=0,185 м. Центры масс звеньев расположены по середине соответствующих звеньев. 3. Массы звеньев: m1=1,5 кг, m2=2 кг, m3 = 2 кг, m4=5 кг, m5 = 5 кг. 4. Момент инерции относительно оси, проходящей через центр масс звена: 5. Рабочие усилие: F=40 Н.
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-12-09; просмотров: 589; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.145.43.92 (0.009 с.) |

 об/мин. Угловая скорость кривошипа
об/мин. Угловая скорость кривошипа  является постоянной.
является постоянной. ,
,  ,
,  .
.
 (1,6)
(1,6)
 (3,6)
(3,6)

 .
. .
. 

 .
. .
.



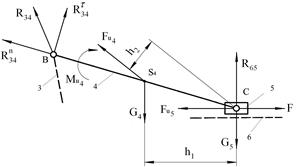 План сил для последней группы Ассура
План сил для последней группы Ассура 
 План сил для звена 4
План сил для звена 4 
 План скоростей
План скоростей 
 План ускорений
План ускорений

 План сил для предпоследней группы
Ассура
План сил для предпоследней группы
Ассура 

 План сил для начального механизма
План сил для начального механизма  Рычаг Жуковского
Рычаг Жуковского 



 , вектор, который направлен вдоль траектории движения точки A.
, вектор, который направлен вдоль траектории движения точки A.
 IIХ-Х
IIХ-Х
 . Если вектор ускорения
. Если вектор ускорения  направлен в сторону
направлен в сторону  , то движение равноускоренное, если вектор ускорения
, то движение равноускоренное, если вектор ускорения  направлен в противоположную сторону
направлен в противоположную сторону  , то движение равнозамедленное.
, то движение равнозамедленное.
 II Х -Х
II Х -Х

 Вектор
Вектор  .
.

 Нормальное ускорение
Нормальное ускорение  =
=  Вектор
Вектор  направлен по радиусу АО к центру вращения О.
направлен по радиусу АО к центру вращения О.
 II OA.
Касательное ускорение
II OA.
Касательное ускорение  Вектор
Вектор  направлен перпендикулярно АО в сторону углового ускорения
направлен перпендикулярно АО в сторону углового ускорения 


 Относительная скорость
Относительная скорость
 Вектор
Вектор  направлен перпендикулярно к ВА в сторону угловой скорости
направлен перпендикулярно к ВА в сторону угловой скорости  .
.

 Относительное ускорение
Относительное ускорение
 Нормальное ускорение
Нормальное ускорение
 =
=  Вектор
Вектор  направлен параллельно АВ (от точки В к точке А)
направлен параллельно АВ (от точки В к точке А)
 II ВА
Касательное ускорение
II ВА
Касательное ускорение
 Вектор
Вектор  направлен перпендикулярно АВ
направлен перпендикулярно АВ

 ВА
ВА



