
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Образец выполнения основной надписи первого листа текстового документаСодержание книги
Поиск на нашем сайте
Расчетно-графической работы
Образец выполнения основной надписи последующих листов текстового документа расчетно-графической работы
Образец выполнения основной надписи чертежного документа Расчетно-графической работы
Расположение схем и
Приложение 3 планов на формате А1
Приложение 4 Основные формулы для определения скоростей и ускорений точек звеньев
Рекомендуемая основная литература 1. Смелягин А.И. Теория механизмов и машин.- Новосибирск: Изд-во НГТУ, 2003. 2. Теория механизмов и машин. Под ред. К.В. Фролова.- М.: Высшая школа, 2002. 3. Левитинский Н.И. Теория механизмов и машин.- М.: Наука,1990. 4. Артоболевский И.И. Теория механизмов и машин.- М.: Наука,1988. 5. Попов С.А. Курсовое проектирование по теории машин и механизмов.- М.: Высшая школа, 1986. 6. Марголин Ш.Ф. Теория механизмов и машин.- Минск: Вышэйшая школа, 1978.
Рекомендуемая дополнительная литература 1. Заблонский К. И. Теория механизмов и машин. Киев: Высшая школа, 1989. 2. Теория механизмов. Под ред. В.А. Гавриленко. М.: Высшая школа, 1973.
Содержание
Стр.
Методические указания к расчетно-графическим работам по Теории механизмов и машин для студентов специальностей НР, ПСТ, НБ, МОП, АТХ, СТЭ, ПДМ, СП, ПТИ, ТМ, МКC, МХП, МСО___очной полной и сокращенной форм обучения
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-12-09; просмотров: 394; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.119.19.251 (0.007 с.) |





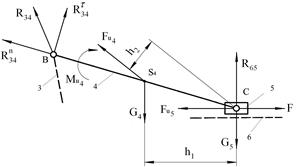 План сил для последней группы Ассура
План сил для последней группы Ассура 
 План сил для звена 4
План сил для звена 4 
 План скоростей
План скоростей 
 План ускорений
План ускорений

 План сил для предпоследней группы
Ассура
План сил для предпоследней группы
Ассура 

 План сил для начального механизма
План сил для начального механизма  Рычаг Жуковского
Рычаг Жуковского 



 , вектор, который направлен вдоль траектории движения точки A.
, вектор, который направлен вдоль траектории движения точки A.
 IIХ-Х
IIХ-Х
 . Если вектор ускорения
. Если вектор ускорения  направлен в сторону
направлен в сторону  , то движение равноускоренное, если вектор ускорения
, то движение равноускоренное, если вектор ускорения  направлен в противоположную сторону
направлен в противоположную сторону  , то движение равнозамедленное.
, то движение равнозамедленное.
 II Х -Х
II Х -Х

 Вектор
Вектор  .
.

 Нормальное ускорение
Нормальное ускорение  =
=  Вектор
Вектор  направлен по радиусу АО к центру вращения О.
направлен по радиусу АО к центру вращения О.
 II OA.
Касательное ускорение
II OA.
Касательное ускорение  Вектор
Вектор  направлен перпендикулярно АО в сторону углового ускорения
направлен перпендикулярно АО в сторону углового ускорения 


 Относительная скорость
Относительная скорость
 Вектор
Вектор  направлен перпендикулярно к ВА в сторону угловой скорости
направлен перпендикулярно к ВА в сторону угловой скорости  .
.

 Относительное ускорение
Относительное ускорение
 Нормальное ускорение
Нормальное ускорение
 =
=  Вектор
Вектор  направлен параллельно АВ (от точки В к точке А)
направлен параллельно АВ (от точки В к точке А)
 II ВА
Касательное ускорение
II ВА
Касательное ускорение
 Вектор
Вектор  направлен перпендикулярно АВ
направлен перпендикулярно АВ

 ВА
ВА



