Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Раздел 1. Выбор электрооборудованияСодержание книги
Поиск на нашем сайте
ОГЛАВЛЕНИЕ ВВЕДЕНИЕ ……………………………………………………………… 5 1.1.Выбор электродвигателя…………………………………………….14 электродвигателя……………………………………………….. 16 1.1.3. Определение необходимой скорости вращения электродвигателя………………………………………………. 17 1.1.4. Определение мощности электродвигателя………………….. 17 1.1.5. Выбор электродвигателя по каталожным данным………….. 18 1.1.6. Проверка электродвигателя по условию перегрузки………..19 1.2. Выбор управляемого выпрямителя……………………………… 20 1.2.1. Краткий обзор существующих управляемых преобразователей……………………………………………… 20 1.2.2. Выбор управляемого преобразователя………………………22 1.3. Выбор согласующего трансформатора……………………………. 23 1.4. Выбор датчика тока…………………………………………………. 24 1.5. Выбор уравнительного реактора…………………………………...26 1.6. Выбор тахогенератора……………………………………………… 26 1.7. Расчет параметров цепи «тиристорный выпрямитель - двигатель постоянного тока»……………………………………… 27 1.8. Обоснование необходимости применения замкнутой системы управления электроприводом…………………………… 29 1.9. Выводы по разделу………………………………………………….. 30 2.1. Составление схем для расчета системы управления электроприводом…………………………………………………… 33 2.1.1. Составление упрощенной принципиальной схемы………...33 2.1.2. Составление функциональной схемы……………………….. 33 2.1.3. Составление структурной схемы…………………………….34 2.2. Определение коэффициента обратной связи по скорости ………35 2.3. Определение напряжения задания задатчика скорости…………. 39 2.4. Определение коэффициента обратной связи по току…………… 40 2.5. Определение коэффициента усиления суммирующего усилителя……………………………………………………………. 46 2.6. Построение статической характеристики электропривода в замкнутой и разомкнутой системе управления…………………47 2.7. Выводы по разделу…………………………………………………..53 РАЗДЕЛ 3. РАСЧЕТ ДИНАМИКИ ЭЛЕКТРОПРИВОДА………. 54 3.1. Составление структурной схемы электропривода постоянного тока для расчета динамики…………………………. 55 3.2. Составление передаточных функций элементов………………… 56 3.2.1. Составление передаточной функции двигателя постоянного тока……………………………………………. 56 3.2.2. Составление передаточной функции тиристорного преобразователя (тиристорного выпрямителя)…………….. 57 3.2.3. Составление передаточной функции цепи обратной связи по скорости…………………………………………… 58 3.3. Составление передаточной функции системы…………………… 60 3.4. Проверка устойчивости системы электропривода……………… 61 3.5. Синтез корректирующего устройства…………………………… 63 3.6. Построение переходного процесса в системе электропривода……………………………………………………. 69 3.7. Оценка показателей качества……………………………………… 69 3.8. Выводы по разделу…………………………………………………..71 серии УКЭ-Л……………………………………… 79 тиристорных преобразователей…………………..83 постоянного тока………………………………… 87 ВВЕДЕНИЕ Для современного промышленного производства характерно широкое внедрение автоматизированного электропривода - основы механизации и комплексной автоматизации технологических процессов. Современный электропривод определяет собой уровень силовой электровооруженности труда и благодаря своим преимуществам по сравнению со всеми другими видами приводов является основным и главным средством автоматизации рабочих машин и производственных процессов. Электропривод определяется как электромеханическая система, состоящая из электродвигательного, преобразовательного, передаточного и управляющего устройств, предназначенная для приведения в движение исполнительных органов рабочей машины и управления этим движением. В отдельных случаях в этой системе - могут отсутствовать преобразовательное и передаточное устройство. Структура электропривода приведена на рис. 1.1.
Рис. 1.1. Структура электропривода. Она содержит преобразовательное устройство (ПРУ), определяемое как электротехническое устройство, преобразующее род тока, напряжение, частоту и изменяющее показатели качества элек- трической энергии, предназначенное для создания управляющего воздействия на электродвигательное устройство. Электродвигательное устройство (ЭДУ), является электротехническим устройством - электрической машиной, - предназначенным для преобразования электрической энергии в механическую или механической энергии в электрическую.
Передаточное устройство (ПУ) предназначено для передачи механической энергии от электродвигательного устройства электропривода к исполнительному органу рабочей машины (ИОРМ) и согласования вида и скоростей их движения.
Управляющее устройство (УУ), является электротехническим устройством, предназначено для управления преобразовательным, электродвигательным и передаточным устройствами. Управляющее устройство, как правило, содержит информационную часть, получающую информацию от задатчиков (сигнал задания) и датчиков обратной связи (сигнал о состоянии привода) и в соответствии с заданными алгоритмами вырабатывает сигналы управления. Посредством системы электропривода приводятся в движение рабочие органы технологических (производственных) машин и осуществляется управление преобразованной энергией. Под управлением здесь понимают организацию процесса преобразования энергии, обеспечивающую в статических и динамических условиях требуемые режимы работы технологических машин. Если основные функции управления выполняются без непосредственного участия человека (оператора), то управление называют автоматическим, а электропривод - автоматизированным. Параметрами электропривода являются скорость, нагрузка, диапазон регулирования, жесткость механической характеристики и электромеханическая постоянная времени. Для управления электроприводами применяется множество различных устройств, однако, в настоящее время наиболее рациональным кажется использование тиристорного управления электроприводами. Для этой цели в разомкнутой или замкнутой системах управления электроприводами используют управляемые выпрямители (для систем с двигателями постоянного тока) и тиристорные регуляторы напряжения или преобразователи частоты (для систем с асинхронными двигателями).
ЗАДАНИЕ НА КУРСОВОЕ ПРОЕКТИРОВАНИЕ Вариант 03.33.03 Диапазон регулирования угловой скорости D=6 Статизм регулирования угловой скорости не более δ=10% Допустимое перерегулирование угловой скорости σ=15% Время регулирования не более tp=1,5 c Допустимое число колебаний не более Np=2
Данные механизма для кратковременного режима работы: Моменты сопротивления на валу механизма: Mm1=400 H*м Mm2=300 H*м Mm3нач=100 Н*м Mm3кон=280 H*м Mm4=400 H*м
Интервалы времени: t1=10мин,t2=40мин,t3=5мин,t4=10мин
Момент инерции механизма Jm=8кг*м2 Максимальная угловая скорость механизма wmmax= 7с-1
Данные редуктора: Передаточное отношение Iп=32 КПД ηп=0,92
ВЫБОР ЭЛЕКТРОДВИГАТЕЛЯ ВЫБОР ТАХОГЕНЕРАТОРА Электродвигатели серии ПБСТ оснащаются встроенными тахогенераторами серии TC-IM
Коэффициент передачи тахогенератора вычисляется по формуле где n - число оборотов в минуту вала тахогенератора; етг - ЭДС тахогенератора, соответствующая числу об/мин его вала, В
Тахогенератор серии TC-IM имеет следующие параметры: номинальная мощность якорной цепи тахогенератора, Р= 5 Вт kтг=30*100 /3.14*3000 =9,55*100*3000=0,318
РАСЧЕТ ПАРАМЕТРОВ СИСТЕМЫ «ТИРИСТОР-НЫЙ ВЫПРЯМИТЕЛЬ - ДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА» Рассчитываются следующие параметры: Сопротивление якорной цепи двигателя: RяцД=bТ*(RЯ+RДП)+Rщ
где (bТ =1.32 - коэффициент, учитывающий увеличение сопротивления при нагреве обмотки якоря двигателя на 6O0C; RДП - сопротивление добавочных полюсов при 150C, Ом; Rщ =2/Iном - сопротивление щеточного контакта, Ом. Активное сопротивление трансформатора:
Максимальная ЭДС тиристорного преобразователя: Edo=kcx*U2ф где kcx -коэффициент схемы выпрямления kcx =1,17 U2ф - фазное напряжение вторичной обмотки согласующего трансформатора, В. U2ф=205
Коэффициент усиления тиристорного преобразователя при использовании системы управления с пилообразным напряжением определяется где Ed=C*wном+Iпот*Rяд -ЭДС двигателя при рабочей нагрузке, В;
Uymax - максимальное напряжение цепи управления (поскольку планируется использование стандартной блочной системы регуляторов, то максимально допустимое напряжение управления надо принять Uymax= 8 В
Еd=0,445*230,38+17,54*0,462=110,62 В .kтп=3.14*239,85/2*8* Эквивалентное сопротивление трансформатора, обусловленное перекрытием токов в фазах преобразователя при коммутации вентилей:
Rk=0,225 Ом Полное активное сопротивление якорной цепи: Rэ=RяцД+Rт+Rизм+Rk+Rш =211,116 Ом Индуктивность обмотки якоря двигателя:
где р - число пар полюсов двигателя (для двигателей серии ПБСТ число пар полюсов р=2); g=0,25 для компенсированных двигателей.
Lяцд=0,25*110 /2*230,38*16=0,004 Гн Индуктивное сопротивление фазы трансформатора, приведенное ко вторичной обмотке:
Индуктивность рассеяния трансформатора: LT=XT/wс где wс=2*p* fc fc - частота питающей сети, Гц. w c =2*3,14*50 =314,16 Lт=0,19 / 314,16 = 0,0006 Гн Суммарная индуктивность якорной цепи двигателя: Lэ=Lяцд+ Lур+2* Lт =0,004+0,36+0,0006*2=0,365 Электромагнитная постоянная якорной цепи
Tяц= Lэ / Rэ Tяц = 0,365 / 211,116 = 0,002 с Электромеханическая постоянная
Tмц=Jполн*Rэ/C2 где Jполн = Jдв+J*m/iп2+0.15*Jд- полный приведенный момент инерции системы, состоящий из момента инерции двигателя, момента инерции механизма приведенного к валу двигателя, и момента инерции передаточного механизма, учитываемого как 15% от момента инерции двигателя. Jполн= 0,026 + 8 / 32*32 +0,15*0,026 =0,038 кг*м Tмц= 0,038 *211,116 / 0,445
1.8. ОБОСНОВАНИЕ НЕОБХОДИМОСТИ ПРИМЕНЕНИЯ ЗАМКНУТОЙ СИСТЕМЫ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ Для обоснования применения замкнутой системы электропривода необходимо найти требуемое абсолютное снижение угловой скорости электропривода, абсолютное снижение угловой скорости электропривода в разомкнутой системе и сравнить их между собой. 1) Находим требуемое абсолютное снижение угловой скорости электропривода при номинальной нагрузке:
где d - заданный статизм в системе электропривода в относительных единицах. 2) Находим действительное абсолютное снижение угловой скорости электропривода в разомкнутой системе:
3) Для целесообразности применения замкнутой системы управления электроприводом необходимо соблюдение условия:
Если данное условие выполняется, то, для получения характеристик электропривода, удовлетворяющих заданным требованиям, необходимо применить замкнутую систему управления электроприводом. Статизм разомкнутой системы вычисляется
(1.36) ВЫВОДЫ ПО РАЗДЕЛУ В данной главе сделали выбор элементов системы электропривода: электродвигателя (с проверкой его по перегрузке) и тахогена-ратора, управляемого выпрямителя, согласующего трансформатора, сглаживающего реактора; рассчитали параметры якорной цепи системы «преобразователь-двигатель»; обосновали необходимость применения замкнутой системы управления электроприводом. Для удобства дальнейших расчетов запишем все найденные значения в таблицу. Сводная таблица расчетных параметров. Табл. 1.6.
Сводная таблица расчетных параметров.-Табл. 1.6 (продолжение).
Где
Второй участок характеризуется вступлением в действие отрицательной обратной связи по току, которая увеличивает наклон (уменьшает жесткость) механической характеристики. Задаваясь током I2 большим чем Iу, можно найти вторую точку (2) характеристики на этом участке. Ее координаты (I2; w2), где из (2.3)
Можно построить второй участок статической характеристики
(2.62)
Дальнейшая работа электропривода происходит следующим образом: увеличение сигнала управления с ростом нагрузки приводит к пробою стабилитрона в узле отсечки, после чего в системе управления начинает действовать фактически только одна отрицательная связь по току с постоянным напряжением управления, равным напряжению пробоя стабилитрона Uvd=const, а уравнение электромеханической характеристики на третьем участке имеет вид
Принимая wз=0 и I з=Imax, можно найти U vd. Третий участок статической характеристики строиться по формуле
(2.64) где
Построим статическую характеристику разомкнутой системы в соответствии с (2.4) при отсутствии обратной связи по скорости
Напряжение задания в этом случае находится из условия w=wн о м , Iя=0 Изменение коэффициентов передачи по скорости (если есть, то по напряжению и положительной по току) приведет к изменению угла наклона статических характеристик на первом и втором участках. Наклон статической характеристики на третьем участке зависит только от коэффициента передачи задержанной отрицательной обратной связи по току. Отрицательная обратная связь по напряжению действует так же, как и отрицательная связь по скорости, она компенсирует падение напряжения в цепи преобразователя под воздействием нагрузки, но не компенсирует падение напряжения в якоре двигателя. Поэтому при изменении коэффициента усиления отрицательной обратной связи по напряжению до максимального значения статическая характеристика может приблизиться к естественной характеристике двигателя. С одной отрицательной связью по напряжению невозможно получить режим, когда заданный перепад скорости меньше перепада скорости на естественной характеристике двигателя. Комбинации различных обратных связей обеспечивают получение различных статических характеристик замкнутых систем управления электроприводом постоянного тока.
2.7. ВЫВОДЫ ПО РАЗДЕЛУ В данном разделе были определены коэффициенты обратных связей по скорости и току, максимальное напряжение задания задат-чика скорости, коэффициенты промежуточного усилителя по каналам задающего воздействия и обратных связей, а так же построены статические электромеханические характеристики электропривода в замкнутой и разомкнутой системе управления.
Получим функцию вида
Передаточную функцию системы можно упростить, если малые постоянные времени фильтра обратной связи по скорости и ти-ристорного преобразователя объединить [10], т.е.
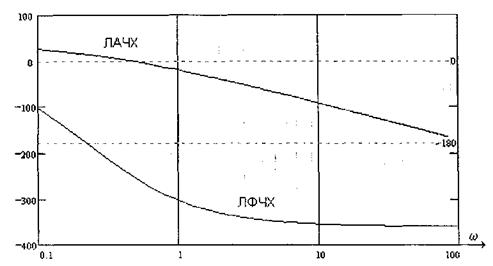
3.4. ПРОВЕРКА УСТОЙЧИВОСТИ СИСТЕМЫ ЭЛЕКТРОПРИВОДА Для расчета устойчивости систем регулирования применяются различные методы. Наиболее распространенным является метод, основанный на построении логарифмических частотных характеристика. Критерий устойчивости Найквиста применим и в случае изображения амплитудно-фазовых характеристик в виде логарифмических амплитудной и фазовой частотных характеристик разомкнутой системы. Необходимым и достаточным условием устойчивости системы является пересечение логарифмической амплитудно-частотной характеристикой (ЛАЧХ) разомкнутой системы оси абсцисс раньше, чем логарифмическая фазно-частотная характеристика пересечет линию, соответствующую ее фазовому сдвигу -p. Для проверки устойчивости системы электропривода необходимо построить на одном графике логарифмические амплитудную и фазную частотные характеристики, и применить критерий Найквиста.
Рис.3.5. Пример устойчивой системы. Просто и удобно строить характеристики посредством программы MathCad на персональной ЭВМ. Для этого воспользуемся формулами: - вещественная частотная характеристика
- мнимая частотная характеристика
- амплитудно-частотная характеристика
- логарифмическая амплитудно-частотная характеристика
- логарифмическая фазно-частотная характеристика
Рис.3.6. Характеристики системы электропривода. Видим, что система неустойчива, т.е. необходимо вводить корректирующие устройства. В том случае, если бы система была устойчива, можно было бы сразу переходить к построению переходного процесса в системе электропривода. Однако если показатели качества не удовлетворяют заданным, то систему придется корректировать. ВЫВОДЫ ПО РАЗДЕЛУ В данном разделе мы определили передаточные функции отдельных элементов системы электропривода, составили общую передаточную функцию в соответствии с расчетной структурной схемой, проверили систему на устойчивость, синтезировали корректирующее устройство, построили переходный процесс и определили показатели качества регулирования. Сделали выводы о соответствии динамических показателей привода заданию. ВЫВОДЫ ПО КУРСОВОМУ ПРОЕКТУ По результатам расчетов необходимо сделать выводы, в которых следует сопоставить результаты расчета статических и динамических показателей работы системы электропривода с заданием, и высказать свои соображения. Необходимо оценить правильность выбора электрооборудования и дать рекомендации по возможной эквивалентной замене оборудования.
ОГЛАВЛЕНИЕ ВВЕДЕНИЕ ……………………………………………………………… 5 1.1.Выбор электродвигателя…………………………………………….14 электродвигателя……………………………………………….. 16 1.1.3. Определение необходимой скорости вращения электродвигателя………………………………………………. 17 1.1.4. Определение мощности электродвигателя………………….. 17 1.1.5. Выбор электродвигателя по каталожным данным………….. 18 1.1.6. Проверка электродвигателя по условию перегрузки………..19 1.2. Выбор управляемого выпрямителя……………………………… 20 1.2.1. Краткий обзор существующих управляемых преобразователей……………………………………………… 20 1.2.2. Выбор управляемого преобразователя………………………22 1.3. Выбор согласующего трансформатора……………………………. 23 1.4. Выбор датчика тока…………………………………………………. 24 1.5. Выбор уравнительного реактора…………………………………...26 1.6. Выбор тахогенератора……………………………………………… 26 1.7. Расчет параметров цепи «тиристорный выпрямитель - двигатель постоянного тока»……………………………………… 27 1.8. Обоснование необходимости применения замкнутой системы управления электроприводом…………………………… 29 1.9. Выводы по разделу………………………………………………….. 30 2.1. Составление схем для расчета системы управления электроприводом…………………………………………………… 33 2.1.1. Составление упрощенной принципиальной схемы………...33 2.1.2. Составление функциональной схемы……………………….. 33 2.1.3. Составление структурной схемы…………………………….34 2.2. Определение коэффициента обратной связи по скорости ………35 2.3. Определение напряжения задания задатчика скорости…………. 39 2.4. Определение коэффициента обратной связи по току…………… 40 2.5. Определение коэффициента усиления суммирующего усилителя……………………………………………………………. 46 2.6. Построение статической характеристики электропривода в замкнутой и разомкнутой системе управления…………………47 2.7. Выводы по разделу…………………………………………………..53 РАЗДЕЛ 3. РАСЧЕТ ДИНАМИКИ ЭЛЕКТРОПРИВОДА………. 54 3.1. Составление структурной схемы электропривода постоянного тока для расчета динамики…………………………. 55 3.2. Составление передаточных функций элементов………………… 56 3.2.1. Составление передаточной функции двигателя постоянного тока……………………………………………. 56 3.2.2. Составление передаточной функции тиристорного преобразователя (тиристорного выпрямителя)…………….. 57 3.2.3. Составление передаточной функции цепи обратной связи по скорости…………………………………………… 58 3.3. Составление передаточной функции системы…………………… 60 3.4. Проверка устойчивости системы электропривода……………… 61 3.5. Синтез корректирующего устройства…………………………… 63 3.6. Построение переходного процесса в системе электропривода……………………………………………………. 69 3.7. Оценка показателей качества……………………………………… 69 3.8. Выводы по разделу…………………………………………………..71 серии УКЭ-Л……………………………………… 79 тиристорных преобразователей…………………..83 постоянного тока………………………………… 87 ВВЕДЕНИЕ Для современного промышленного производства характерно широкое внедрение автоматизированного электропривода - основы механизации и комплексной автоматизации технологических процессов. Современный электропривод определяет собой уровень силовой электровооруженности труда и благодаря своим преимуществам по сравнению со всеми другими видами приводов является основным и главным средством автоматизации рабочих машин и производственных процессов. Электропривод определяется как электромеханическая система, состоящая из электродвигательного, преобразовательного, передаточного и управляющего устройств, предназначенная для приведения в движение исполнительных органов рабочей машины и управления этим движением. В отдельных случаях в этой системе - могут отсутствовать преобразовательное и передаточное устройство. Структура электропривода приведена на рис. 1.1.
Рис. 1.1. Структура электропривода. Она содержит преобразовательное устройство (ПРУ), определяемое как электротехническое устройство, преобразующее род тока, напряжение, частоту и изменяющее показатели качества элек- трической энергии, предназначенное для создания управляющего воздействия на электродвигательное устройство. Электродвигательное устройство (ЭДУ), является электротехническим устройством - электрической машиной, - предназначенным для преобразования электрической энергии в механическую или механической энергии в электрическую.
Передаточное устройство (ПУ) предназначено для передачи механической энергии от электродвигательного устройства электропривода к исполнительному органу рабочей машины (ИОРМ) и согласования вида и скоростей их движения.
Управляющее устройство (УУ), является электротехническим устройством, предназначено для управления преобразовательным, электродвигательным и передаточным устройствами. Управляющее устройство, как правило, содержит информационную часть, получающую информацию от задатчиков (сигнал задания) и датчиков обратной связи (сигнал о состоянии привода) и в соответствии с заданными алгоритмами вырабатывает сигналы управления. Посредством системы электропривода приводятся в движение рабочие органы технологических (производственных) машин и осуществляется управление преобразованной энергией. Под управлением здесь понимают организацию процесса преобразования энергии, обеспечивающую в статических и динамических условиях требуемые режимы работы технологических машин. Если основные функции управления выполняются без непосредственного участия человека (оператора), то управление называют автоматическим, а электропривод - автоматизированным. Параметрами электропривода являются скорость, нагрузка, диапазон регулирования, жесткость механической характеристики и электромеханическая постоянная времени. Для управления электроприводами применяется множество различных устройств, однако, в настоящее время наиболее рациональным кажется использование тиристорного управления электроприводами. Для этой цели в разомкнутой или замкнутой системах управления электроприводами используют управляемые выпрямители (для систем с двигателями постоянного тока) и тиристорные регуляторы напряжения или преобразователи частоты (для систем с асинхронными двигателями).
ЗАДАНИЕ НА КУРСОВОЕ ПРОЕКТИРОВАНИЕ Вариант 03.33.03 Диапазон регулирования угловой скорости D=6 Статизм регулирования угловой скорости не более δ=10% Допустимое перерегулирование угловой скорости σ=15% Время регулирования не более tp=1,5 c Допустимое число колебаний не более Np=2
Данные механизма для кратковременного режима работы: Моменты сопротивления на валу механизма: Mm1=400 H*м Mm2=300 H*м Mm3нач=100 Н*м Mm3кон=280 H*м Mm4=400 H*м
Интервалы времени: t1=10мин,t2=40мин,t3=5мин,t4=10мин
Момент инерции механизма Jm=8кг*м2 Максимальная угловая скорость механизма wmmax= 7с-1
Данные редуктора: Передаточное отношение Iп=32 КПД ηп=0,92
РАЗДЕЛ 1. ВЫБОР ЭЛЕКТРООБОРУДОВАНИЯ В современном автоматизированном электроприводе можно условно выделить два канала распространения сигналов: - канал управления (информационный канал), по которому передаются сигналы управления со входа привода к объекту управления. Элементами канала управления являются датчики, корректирующие устройства, усилители напряжения и мощности, исполнительные устройства и силовой редуктор; - силовой канал, по которому преобразуемая энергия распространяется от источника питания к объекту управления. Силовой канал привода включает в себя источники питания, преобразовательные устройства электродвигательные устройства, исполнительные элементы, силовой редуктор, выходные цепи усилителей мощности. Таким образом, некоторые элементы привода являются общими для канала управления и силового канала. Назначение силового канала состоит в преобразовании энергии источника питания в механическую энергию движения объекта управления (выходного вала привода), а назначение информационного канала - в управлении потоком энергии в силовом канале. Выбор двигателя будем проводить на основе метода эквивалентного момента. выбор электрооборудования включает следующие этапы: • анализ характера изменения возмущающих моментов; • расчет мощности и выбор электродвигателя по требуемым максимальным значениям параметров движения; • проверка правильности выбора электродвигателя по перегрузочной способности и тепловому режиму; • выбор элементов силового комплектного тиристорного преобразователя; • расчет параметров системы «тиристорный преобразователь -двигатель постоянного тока». ВЫБОР ЭЛЕКТРОДВИГАТЕЛЯ
|
||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-12-13; просмотров: 213; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.119.118.237 (0.011 с.) |









 (1.33)
(1.33) (1.34)
(1.34) (1-35)
(1-35)