Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Определение максимального напряжения задатчика скоростиСодержание книги
Поиск на нашем сайте
Напряжение задания, соответствующее верхнему уровню скорости, находим из (2.5) без нагрузки с одной обратной связью по скорости [10]. Для нахождения напряжения задания перепишем (2.5) в несколько ином виде
где w 0 - скорость идеального холостого хода двигателя, рад/с. Скорость идеального холостого хода на верхней и нижней границах регулирования находим из выражения
При kpc=l и ky=l получаем
Выражаем из этого выражения максимальное напряжение задания U3max, учитывая, что Iя=Iном- представляет собой номинальный ток двигателя
где w 0 - скорость холостого хода, соответствующая верхнему уровню регулирования скорости. 2.4. Определение коэффициента обратной связи по току [10] Требуется в соответствии со структурной схемой (рис.2.2) найти коэффициент обратной связи по току. Составим систему уравнений, полностью описывающих систему «тиристорный преобразователь - двигатель постоянного тока», на основе структурной схемы (рис.2.2) [3,4]: - уравнение связи входа и выхода тиристорного управляемого выпрямителя
- уравнение связи выхода преобразователя и электрической части электродвигателя (якорной цепи системы «преобразователь-двигатель»)
— уравнение связи входа и выхода механической части электродвигателя
Здесь переменные (см.п.2.2): IЯ - ток якорной цепи двигателя, А; IУ - ток уставки (отсечки) двигателя, А; IС - ток статической нагрузки двигателя, А; Rи - сопротивление измерительного резистора, Ом; bт - коэффициент рассчитываемой обратной связи по току; Тфтг - постоянная времени фильтра датчика скорости, с; Тфдт - постоянная времени фильтра датчика тока, с; Ттп - постоянная времени тиристорного преобразователя, с; Тяц - электромагнитная постоянная времени главной цепи объекта управления, с; Тмц - электромеханическая постоянная времени главной цепи объекта управления, с; р - оператор Лапласа. Все переменные типовых звеньев, которыми представлена рассматриваемая система электропривода, как элементы динамической системы подробнее будут рассмотрены в разделе 3. Исследование работы электропривода производится отдельно по управляющему воздействию при Мс=0 (эквивалентно IC*RЭ=0) и по возмущающему воздействию при U3=0 или U3=const. Поэтому уравнение (2.23) необходимо переписать в виде
Настройку системы управления электроприводом производим при kpc=l, вследствие последующего введения корректирующих цепей. Преобразуем уравнения (2.22) и (2.23) этой системы к более удобному виду
Подставляя (2.26) в (2.21) и (2.25), получаем систему
Преобразуя систему и подставляя (2.28) уравнение в (2.27), получаем
Выражаем угловую скорость вращения электродвигателя
Рассмотрим отдельно знаменатель этого уравнения
Учитывая, что запаздывание в цепи обратной связи, обусловленное фильтрами на выходе датчиков, обычно невелико и характер изменения самой выходной величины примерно идентичен характеру изменения выходного напряжения датчика, можно в передаточной функции фильтров положить, что
Здесь расчет постоянных времени рассмотрен в разделе 3 «Расчет динамики электропривода». Поэтому (2.32) принимает вид
Раскрываем скобки и группируем по степеням
Пренебрегая высшими степенями и подставляя знаменатель в (2.31) получаем
Выразим ЭДС электродвигателя (см.рис.2.2)
Рис.2.4. Звено конструктивного коэффициента электродвигателя.
Учитывая (2.39) из (2.38) получаем выражение для ЭДС электродвигателя
Коэффициент усиления обратной связи по току bт находиться из условия ограничения тока в начальный период переходного процесса. Для этой цели понижаем порядок операторного уравнения (2.37) за счет пренебрежения малыми постоянными времени. Зависимость ЭДС двигателя от времени можно получить решением операторного уравнения (2.40). Вводим обозначения
Для получения зависимости ЭДС двигателя от времени дом-ножим (2.40) на 1/р
Решая это уравнение, получаем зависимость ЭДС электродвигателя во времени
Исходя из структурной схемы (рис.2.2), динамический ток [10]
Максимальный ток будет иметь место при t=0. Следовательно
Так как при t, близком к нулю, E(t)=0, будем считать, что обратная связь по скорости еще не действует (bс=0) - вследствие действия инерции двигатель еще не разогнался. При этих условиях уравнение (2.46) можно записать
Разность между максимальным током Imax и током уставки IУ должна быть меньше 0.2*Imax. Т.е. 0.8*Imax<Iy<Imax. Значение Imax берется не более допустимого по условиям коммутации в двигателе. Для электродвигателей постоянного тока значение предельно допустимого тока лежит в пределах Imах=(2..З)*Iном Из (2.47) получим
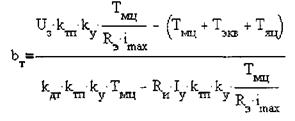
При ky=l получаем
и сопротивление измерительного резистора для узла отсечки Rи=R’и= RИ /RЭ перепишем (2.49) в виде
2.5. Определение коэффициентов усиления суммирующего усилителя Требуется найти коэффициенты усиления суммирующего усилителя по каналам задающего воздействия, напряжений обратной связи по скорости и току. Коэффициент усиления суммирующего усилителя па каждому из каналов находится по однотипной формуле [13]
Для канала по задающему воздействию коэффициент усиления суммирующего усилителя находиться
Для канала обратной связи по скорости коэффициент усиления суммирующего усилителя можно найти
(2.53) где из условия работы двигателя на максимальной требуемой угловой скорости вращения
Для канала обратной связи по току коэффициент усиления суммирующего усилителя будет
(2.55) где из условия протекания в якорной цепи двигателя при его работе на рассчитываемую нагрузку тока равного IПОТ
Для удобства построения статической характеристики следует внести все найденные значения в табл.2.1.
2.6. Построение статической характеристики электропривода в замкнутой и разомкнутой системе управления [14] К системам автоматического управления электроприводами предъявляется и целый ряд требований, обусловленных в каждом конкретном случае спецификой технологического процесса и режимом работы производственной машины. Среди них важнейшее место занимают требования обеспечения заданных статических и динамических характеристик электропривода. Эти требования в значительной мере определяют выбор структуры автоматической системы управления электроприводом и ее параметров, что составляет одну из главных задач проектирования автоматизированных электроприводов. Статическая характеристика замкнутой системы преобразователь-двигатель представляет собой графическое изображение зависимости регулируемой переменной системы от основного возмущающего воздействия f1 в установившемся режиме при фиксированном значении задающего воздействия g и отсутствии других воз-
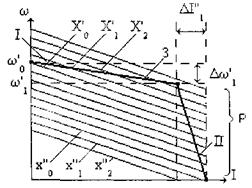
мущающих воздействий f1, f2,... Влияние последних сказывается в виде «дрейфа» статической характеристики или приводит к искажению ее формы. Статическая характеристика может иметь несколько участков разной формы, каждый из которых соответствует определенным структурам или параметрам системы, если они фиксировано изменяются в процессе управления. На рис.2.5 показана статическая электромеханическая характеристика 3, типичная для многих замкнутых систем преобразователь-двигатель постоянного тока. Она представляет собой зависимость скорости двигателя со от протекающего в его якорной цепи тока I при использовании различных регулирующих обратных связей. На этом же рисунке изображено семейство Р статических электромеханических характеристик разомкнутой системы преобразователь-двигатель. Каждая из этих характеристик отвечает фиксированному значению xi управляющего сигнала x.
Характеристика 3 состоит из двух участков. На участке 1 действуют обратные связи, стабилизирующие скорость двигателя. Поэтому здесь регулируемая величина у'=w’, а момент двигателя можно рассматривать как основное возмущающее воздействие, поскольку в установившемся режиме M'=M'c=f1 Когда М'=0 скорость имеет значение Y'0=w’0, а управляющий сигнал х’=Х'0. При увеличении момента нагрузки под влиянием обратных связей происходит непрерывный переход с одной механической характеристики разомкнутой системы на другую вследствие возрастания управляющего сигнала (характеристики Р при X'1, Х'2, Х'3....). Поэтому характеристика 3, представляющая собой совокупность точек семейства Р, становиться на участке I значительно жестче характеристик разомкнутой системы. Перепад скорости на этом участке Dw’1=w’0 - w’1 (т.е. DY’1= Y’0 - Y’1) при изменении момента от М'=0 (f'1=0) до M'=M'1 (f'1=F'1(1))) характеризует стабильность регулирования, т.е. точность поддержания постоянства скорости при наличии возмущающего воздействия f'1=M’c
При переходе к участку II характеристики 3 стабилизирующие скорость обратные связи отключаются и вводиться в действие отрицательная обратная связь по току, т.е. изменяется структура системы. Последняя теперь будет работать в режиме —автоматического регулирования момента двигателя, т.е. здесь у''=I''. При этом скорость двигателя представляет собой основное возмущающее воздействие (в установившемся режиме w"=w"с=f''1). При неподвижном двигателе Y''0=I''0=I''кз и управляющий сигнал х"=Х''0). С увеличением скорости, благодаря действию регулирующей обратной связи по току растет сигнал х" принимая последовательные значения Х"1, Х"2, Х''3..., что отвечает переходу изображающей точки характеристики 3 по соответствующим характеристикам семейства Р. Поэтому на участке II замкнутой системы значительные изменения скорости сопровождаются относительно небольшими изменениями тока. Перепад тока DI’’1= I’’0 - I’’1 (т.е. DY’’1=Y’’0 - Y’’1) определяет здесь точность поддержания постоянства тока при изменении возмущающего воздействия от w’’=0 (f’’1 =0) до w’’=w"1(f’’=F'’1(1)). Участок II предусматривается, например, для ограничения тока двигателя в процессе его пуска, для защиты технологической машины от перегрузки и т.д. Введение в замкнутые контуры элементов с нелинейными характеристиками вида: - задержанная обратная связь по току - отсечка; - ограничение амплитуды напряжения управления и т.д. позволяют создать специальные статические характеристики, например экскаваторную (упорную). Подобными нелинейными элементами оснащены все современные системы автоматического управления электроприводами. Построим статическую характеристику для системы электропривода изображенной на рис.2.2. В соответствии с рис.2.2 и при учете всех обратных связей из (2.3) можно записать уравнение
(2.57) Для данной схемы электропривода, статическая характеристика имеет вид экскаваторной (рис.2.6) с тремя участками [1]. На первом участке (I) при токе от 0 до тока отсечки IУ действует только обратная связь по скорости Uoc (если есть, то по напряже-
нию и положительная по току). На втором участке (II) включается в действие отрицательная обратная связь по току UT от IУ до I2, и действуют все обратные связи. На третьем участке (III) отключаются связи по скорости (если есть, то по напряжению и положительная по току), а действует только постоянное напряжение задания по току Uvd=const и отрицательная связь по току до скорости w=0, где ток равен предельно допустимому Iуп=Imах.
Рис.2.6. Статическая характеристика электропривода. Действие одной отрицательной обратной связи по скорости на первом участке (рис.2.6) характеризуется двумя точками: точкой холостого хода w0 и точкой (1) вступления в действие отрицательной связи по току с отсечкой. На этом участке скорость определяется выражением
При построении первой части статической характеристики необходимо найти точку холостого хода электропривода с координатами (IЯ=0; w0), воспользовавшись (2.17) и (2.18), где w0 соответствует w0max, и точку (1) с координатами (IУ; w1), воспользовавшись уравнением
(2.59) либо построить первый отрезок статической характеристики по формулам
(2.60) Где
Второй участок характеризуется вступлением в действие отрицательной обратной связи по току, которая увеличивает наклон (уменьшает жесткость) механической характеристики. Задаваясь током I2 большим чем Iу, можно найти вторую точку (2) характеристики на этом участке. Ее координаты (I2; w2), где из (2.3)
Можно построить второй участок статической характеристики
(2.62)
Дальнейшая работа электропривода происходит следующим образом: увеличение сигнала управления с ростом нагрузки приводит к пробою стабилитрона в узле отсечки, после чего в системе управления начинает действовать фактически только одна отрицательная связь по току с постоянным напряжением управления, равным напряжению пробоя стабилитрона Uvd=const, а уравнение электромеханической характеристики на третьем участке имеет вид
Принимая wз=0 и I з=Imax, можно найти U vd. Третий участок статической характеристики строиться по формуле
(2.64) где
Построим статическую характеристику разомкнутой системы в соответствии с (2.4) при отсутствии обратной связи по скорости
Напряжение задания в этом случае находится из условия w=wн о м , Iя=0 Изменение коэффициентов передачи по скорости (если есть, то по напряжению и положительной по току) приведет к изменению угла наклона статических характеристик на первом и втором участках. Наклон статической характеристики на третьем участке зависит только от коэффициента передачи задержанной отрицательной обратной связи по току. Отрицательная обратная связь по напряжению действует так же, как и отрицательная связь по скорости, она компенсирует падение напряжения в цепи преобразователя под воздействием нагрузки, но не компенсирует падение напряжения в якоре двигателя. Поэтому при изменении коэффициента усиления отрицательной обратной связи по напряжению до максимального значения статическая характеристика может приблизиться к естественной характеристике двигателя. С одной отрицательной связью по напряжению невозможно получить режим, когда заданный перепад скорости меньше перепада скорости на естественной характеристике двигателя. Комбинации различных обратных связей обеспечивают получение различных статических характеристик замкнутых систем управления электроприводом постоянного тока.
2.7. ВЫВОДЫ ПО РАЗДЕЛУ В данном разделе были определены коэффициенты обратных связей по скорости и току, максимальное напряжение задания задат-чика скорости, коэффициенты промежуточного усилителя по каналам задающего воздействия и обратных связей, а так же построены статические электромеханические характеристики электропривода в замкнутой и разомкнутой системе управления.
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-12-13; просмотров: 256; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.227.209.207 (0.01 с.) |