
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Типовые устройства систем регулированияСодержание книги Похожие статьи вашей тематики
Поиск на нашем сайте ТИПОВЫЕ УСТРОЙСТВА СИСТЕМ РЕГУЛИРОВАНИЯ Регуляторы Важной функцией современных систем автоматики является регулирование ее координат, то есть поддержание с необходимой точностью требуемых их значений. Данная функция реализуется с помощью большого числа различных элементов, первостепенное значение среди которых имеют регуляторы. Регулятор выполняет преобразование управляющего сигнала, соответствующее математическим операциям, требуемым по условиям работы системы регулирования. К типовым требуемым операциям относятся следующие преобразования сигнала: пропорциональное, пропорционально-интегральное, пропорционально-интегрально-диф-ференциальное.
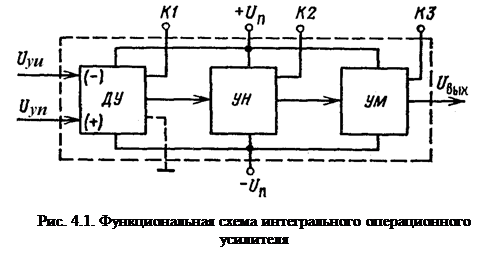
Основу аналогового регулятора составляет операционный усилитель - усилитель постоянного тока, который при отсутствии обратных связей имеет высокий коэффициент усиления. Наибольшее применение находят операционные усилители интегрального исполнения. Операционный усилитель представляет собой многокаскадную структуру, в которой можно выделить, входной дифференциальный усилитель (ДУ) с инверсным и прямым входами, усилитель напряжения (УН), реализующий высокий коэффициент усиления, и усилитель мощности (УМ), обеспечивающий необходимую нагрузочную способность операционного усилителя. Функциональная схема операционного усилителя приведена на рис. 4.1. Однокристальное малогабаритное исполнение операционного усилителя обусловливает высокую стабильность параметров, что позволяет получить высокий коэффициент усиления на постоянном токе. Выведенные из схемы точки Kl, К2, КЗ предназначены для подключения внешних корректирующих цепей, снижающих коэффициент усиления на высоких частотах и повышающих устойчивость работы усилителя с обратными связями. Без корректирующих цепей при достаточно больших частотах, когда накопившееся отставание по фазе составит 180°, знак обратной связи изменяется, и при большом коэффициенте усиления операционный усилитель самовозбуждается и входит в режим автоколебаний. На рис. 4.1 использованы следующие обозначения: Uп - напряжение питания усилителя; Uуи - входное напряжение управления по инверсному входу усилителя; Uуп - входное напряжение управления по прямому входу усилителя; Uвых - выходное напряжение усилителя. Все указанные выше напряжения измеряются относительно общего провода двухполярного источника питания. Схемы включения операционного усилителя приведены на рис. 4.2. Дифференциальный каскад операционного усилителя имеет два входа управления: прямой с потенциалом Uуп и инверсный с потенциалом Uуи (рис. 4.2, а).
Выходное напряжение усилителя определяется произведением коэффициента усиления на разность потенциалов входов усилителя, то есть Uвых = kуо (Uуп - Uуи) = kуоUу, где kуо - дифференциальный коэффициент усиления операционного усилителя; Uу - дифференциальное входное напряжение усилителя, то есть напряжение между прямым и инверсным входами. Дифференциальный коэффициент усиления интегральных операционных усилителей при отсутствии обратных связей Относительно входных напряжений Uвхп и Uвхи выходное напряжение определяется разностью Uвых = kупUвхп - kуиUвхи, где коэффициенты усиления по прямому входу kуп и по инверсному входу kуи определяются схемой включения усилителя. Для схемы включения по прямому входу, приведенной на рис. 4.3, б, коэффициент усиления определяется по формуле
а для схемы включения по инверсному входу, приведенной на рис. 4.3, в, - по формуле
Для построения различных схем регуляторов обычно используется схема включения операционного усилителя с инверсным входом. Как правило, регуляторы должны иметь несколько входов. Входные сигналы подаются в точку 1 (рис. 4.2, в) через индивидуальные входные сопротивления. Требуемые передаточные функции регуляторов получаются за счет комплексных активно-емкостных сопротивлений в цепи обратной связи Zос и во входных цепях Zвх. Передаточная функция регулятора относительно любого из входов без учета инверсии выходного напряжения
В зависимости от вида передаточной функции операционный усилитель может рассматриваться как тот или другой функциональный регулятор. В дальнейшем для реализации регуляторов будем рассматривать только схемы включения по инверсному входу. Пропорциональный регулятор (П-регулятор) -это операционный усилитель с жесткой обратной связью, приведенный на рис. 4.3, а. Его передаточная функция
W(p) = kП, (4.2) где kП - коэффициент усиления П-регулятора. Как следует из передаточной функции (4.2), в пределах полосы пропускания операционного усилителя логарифмическая амплитудная частотная характеристика (ЛАЧХ) П-регулятора параллельна оси частот w, а фаза равна нулю (рис. 4.3, б).
 , (4.3) , (4.3)
где Tи = Rвх Cос - постоянная интегрирования. Как следует из (4.3), фазовый сдвиг выходного сигнала равен - p / 2, ЛАЧХ имеет наклон -20 дБ /дек, а логарифмическая фазовая частотная характеристика (ЛФЧХ) параллельна оси частот w (рис. 4.4, б). Пропорционально-интегральный регулятор (ПИ-регулятор ) получается путем параллельного соединения П- и И-регуляторов, то есть
Получить передаточную функцию (4.4) можно на одном операционном усилителе включением в его обратную связь активно-емкостного сопротивления Zос(p) = Rос(p) + + 1 / (Cосp), как показано на рис. 4.5, а.
Тогда в соответствии с (4.1)
где T1 = RосCос; TИ = RвхCос; kП = Rос / Rвх.
Пропорционально-дифференциальный регулятор (ПД-регулятор) получается параллельным соединением П-регулятора и дифференциального Д-регулятора, то есть WПД(p) = kП + TДp = kП(T1p+1). (4.5) Передаточная функция (4.5) получается путем подключения конденсатора к входному резистору операционного усилителя, как показано на рис. 4.6, а. Тогда с учетом (4.1) имеем
где T1 = RвхCвх; kП = Rос / Rвх.
Логарифмические частотные характеристики ПД-регулятора приведены на рис. 4.6, б. Пропорционально-интегрально-дифференциальный регулятор (ПИД-регулятор). Этотрегуляторполучается путем параллельного включения трех регуляторов - П-регулятора, И-регулятора и Д-регулятора. Его передаточная функция имеет вид
Передаточная функция (4.6) всегда может быть реализована параллельным включением ПД-регулятора и И-регулятора, имеющих, соответственно, передаточные функции (4.5) и (4.3). При этом схема ПИД-регулятора может быть выполнена на трех операционных усилителях. Первый усилитель реализует функцию ПД-регулятора (рис. 4.6, а), второй усилитель - функцию И-регулятора (рис. 4.4, а), третий усилитель (рис. 4.3, а) - функцию суммирования выходных выходных сигналов первого и второго усилителей. Если на параметры kП, TИ и TД наложить ограничение
то передаточная функция (4.6) может быть записана в виде
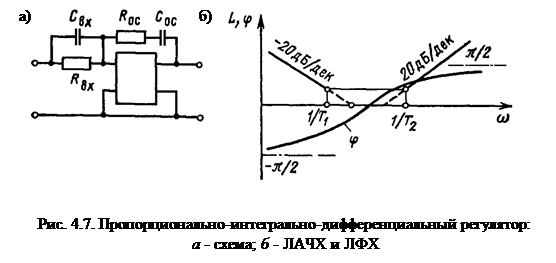
где kП = (T1+T2) / TИ; ТД = (T1T2) / TИ. ПИД-регулятор с передаточной функцией (4.7) представляет собой последовательное включение ПД-регулятора и ПИ-регулятора и может быть реализован на одном операционном усилителе с сопротивлением в цепи обратной связи Zос(p) = Rос + 1/(Cосp) и сопротивлением во входной цепи
При этом постоянные времени регулятора T1 = RвхCвх, T2 =RосCос, T0 =RвхCос.
Схема ПИД-регулятора на одном усилителе приведена на рис. 4.7, а, а его логарифмические частотные характеристики на рис. 4.7, б. Рассмотренные схемы ПД-регулятора и ПИД-регулятора имеют во входных цепях усилителя конденсаторы, которые для высокочастотных помех представляют собой сопротивление, близкое к нулю. Для повышения устойчивости регуляторов последовательно с конденсатором можно включать дополнительный резистор с небольшим сопротивлением (не менее, чем на один порядок меньшим емкостного сопротивления конденсатора). Регуляторы, их работа и технические реализации более подробно рассмотрены в /1/.
Вопросы для самопроверки
1. Какую функцию выполняют регуляторы систем автоматики? 2. Какие типовые преобразования управляющего сигнала производят регуляторы систем автоматики? 3. Что является основой построения большинства современных аналоговых регуляторов? 4. Какие основные свойства характерны для операционных усилителей? 5. Что является входными координатами типового операционного усилителя? 6. Что является выходной координатой типового операционного усилителя? 7. Какие составляющие части входят в функциональную схему операционного усилителя? 8. Назовите типовые схемы включения операционных усилителей. 9. Какая типовая схема включения операционного усилителя используется обычно для реализации регуляторов? 10. Приведите передаточную функцию операционного усилителя для схемы включения по инвертирующему входу. 11. Какой элемент содержит пропорциональный регулятор в цепи обратной связи операционного усилителя? 12. Какой элемент содержит пропорциональный регулятор во входной цепи операционного усилителя? 13. Приведите передаточную функцию пропорционального регулятора. 14. Какой вид имеют амплитудная частотная и фазовая частотная характеристики пропорционального регулятора? 15. Какой элемент содержит интегральный регулятор в цепи обратной связи операционного усилителя? 16. Какой элемент содержит интегральный регулятор во входной цепи операционного усилителя? 17. Приведите передаточную функцию интегрального регулятора. 18. Какой наклон имеет логарифмическая амплитудная частотная характеристика интегрального регулятора? 19. Какой вид имеет фазовая частотная характеристика интегрального регулятора? 20. Какие элементы содержит цепь обратной связи операционного усилителя пропорционально-интегрального регулятора? 21. Какой элемент содержит входная цепь операционного усилителя пропорционально-интегрального регулятора? 22. Приведите передаточную функцию пропорционально-интегрального регулятора. 23. Какой элемент содержит цепь обратной связи операционного усилителя пропорционально-дифференциального регулятора? 24. Приведите передаточную функцию пропорционально-дифференциального регулятора. 25. При каких ограничениях на параметры пропорционально-интегрально-дифференциального регулятора он реализуется на одном операционном усилителе? 26. Какие элементы содержит входная цепь пропорционально-интегрально-дифференциального регулятора, выполненного на одном операционном усилителе? 27. Какие элементы содержит цепь обратной связи пропорционально-интегрально-дифференциального регулятора, выполненного на одном операционном усилителе? Задатчики интенсивности Типовым задающим блоком в системах управления электроприводами и в других системах автоматики является интегрозадающее устройство или задатчик интенсивности (ЗИ). Задача ЗИ - сформировать плавное изменение задающего сигнала при переходе от одного уровня к другому, а именно создать линейное нарастание и спадание сигнала с требуемым темпом. В установившемся режиме напряжение на выходе задатчика интенсивности равно напряжению на его входе.
Темп интегрирования может регулироваться изменением Rвх2. Третий усилитель У3 формирует отрицательное напряжение обратной связи
При подаче на вход задающего напряжения Uз выходное напряжение линейно возрастает согласно (4.8). В момент времени t=tп, когда Uз = - Uос, интегрирование прекращается, и выходное напряжение, как следует из (4.9), достигнув значения Скорость изменения выходного напряжения этого ЗИ, как следует из (4.8), может меняться либо изменением величины напряжения U1, например, путем выбора стабилитронов в цепи обратной связи усилителя У1 с напряжением стабилизации, равным требуемому значению U1, либо изменением величины произведения Rвх2Cос2.
Вопросы для самопроверки 1. С какой целью используются задатчики интенсивности в схемах автоматики? 2. Что является входной и выходной координатами задатчика интенсивности? 3. Чему равен статический коэффициент усиления задатчика интенсивности? 4. Как должно изменяться напряжение на выходе однократно интегрирующих задатчиков интенсивности при ступенчатых изменениях входного напряжения? 5. На основе каких усилителей строятся интегрирующие задатчики интенсивности? 6. Сколько операционных усилителей, включенных по инверсному входу, необходимо для реализации однократно интегрирующего задатчика интенсивности?
7. Укажите назначение каждого из трех операционных усилителей в типовой схеме однократно интегрирующего задатчика интенсивности, выполненной на микросхемах. 8. Какие параметры влияют на скорость изменения выходного напряжения однократно интегрирующего задатчика интенсивности на трех операционных усилителях? 9. Благодаря чему достигается линейное изменение напряжения на конденсаторе в схеме однократно интегрирующего транзисторного задатчика интенсивности? 10. Какие параметры влияют на скорость изменения выходного напряжения однократно интегрирующего транзисторного задатчика интенсивности? Согласующие элементы Функциональные элементы в составе систем управления могут быть разнородными по типу сигнала, роду тока, по сопротивлениям и мощности и по другим показателям. Поэтому при соединении элементов возникает задача согласования их характеристик. Эту задачу решают согласующие элементы. К данной группе элементов относятся фазовые детекторы, согласующие род тока, цифроаналоговые и аналого-цифровые преобразователи, согласующие тип сигнала, эмиттерные повторители, согласующие входные и выходные сопротивления, усилители мощности, гальванические разделители и другие элементы. Функцию согласования могут выполнять также элементы, нормально предназначенные для других целей. Например, рассмотренный в п. 4.1 операционный усилитель оказывается эмиттерным повторителем относительно неинвертируемого входа при подключении выходного напряжения на инвертируемый вход. Для гальванического разделения может быть, например, использован трансформаторный датчик напряжения. Такие и подобные им элементы оказываются очевидными или известными и рассматриваться не будут. Рассмотрим более сложные типовые согласующие элементы. Фазовый детектор (ФД) в научно-технической литературе получил ряд других названий: фазочувствительный усилитель, фазочувствительный выпрямитель, фазовый дискриминатор, демодулятор. Назначение ФД - преобразование входного напряжения переменного тока Uвх в выходное напряжение постоянного тока Uвых, полярность и амплитуда которого зависят от фазы входного напряжения j. Таким образом, ФД имеет две входные координаты: амплитуду входного напряжения Uвхm и фазу входного напряжения j и одну выходную координату: среднее значение выходного напряжения Uвых. Различают два режима работы ФД: амплитудный режим, когда фаза входного напряжения остается постоянной, принимая одно из двух значений 0 или p, Uвхm = var и Uвых = f(Uвхm); фазовый режим, когда Uвх = const, j = var и Uвых = f(j). В амплитудном режиме ФД применяется как преобразователь сигнала рассогласования переменного тока в управляющий сигнал в следящих приводах постоянного тока, как преобразователь выходного сигнала тахогенератора переменного тока и так далее. В фазовом режиме ФД применяется в системах управления, в которых контролируемой и управляющей величиной является плавно изменяющаяся фаза. На фазовый детектор, как правило, не возлагается функция усиления напряжения. Поэтому коэффициент усиления ФД близок к единице. На рис. 4.11 изображена расчетная схема замещения двухполупериодного ФД. Схема соответствует нулевой схеме выпрямления, в которой вентили заменены функциональными ключами K1 и К2. Сопротивление нагрузки Rн, на котором выделяется выходное напряжение, соединяет средние точки а, 0 ключей и источников ЭДС управления eу. В каждый контур введено внутреннее сопротивление источника ЭДС управления Rу. Состоянием ключей управляет опорная ЭДС eоп в соответствии с алгоритмом: для еоп > 0 К1 включен, то есть его
коммутационная функция yк1 = 1,а К2 отключен, то есть его коммутационная функция yк2 = 0. Для eоп < 0 yк1 = 0, а yк2 = 1. Данный алгоритм может быть представлен формулами yк1 = (1+sign eоп) /2; yк2 = (1- sign eоп) /2. (4.10) Очевидно, что при замкнутом К1 выходная ЭДС eвых между точками а, 0 равна eу, а при замкнутом К2 eвых = - eу, то есть eвых = eуyк1 - eуyк2. (4.11) Подстановка (4.10) в (4.11) даст eвых = eу sign eоп . (4.12) Соответствующая алгоритмам (4.11) и (4.12) диаграмма изменения выходной ЭДС приведена на рисунке 4.12. Если eоп = Eопmsinwt и eу = Eуmsin(wt - j), где Eопm, Eуm - амплитудные значения опорной ЭДС и ЭДС управления; w - угловая частота опорной ЭДС и ЭДС управления, то среднее значение выпрямленной выходной ЭДС
Так как Eуm = kпUвхm, среднее значение выходного напряжения
где kп - коэффициент передачи от входного напряжения к ЭДС управления. Он определяется особенностями конкретной принципиальной схемы ФД. Для j = const = 0 или j = const = p имеет место амплитудный режим работы ФД, для которого характеристика управления прямолинейна: Uвых = kФДUвх, где с учетом (4.14) коэффициент усиления ФД в амплитудном режиме
При j = 0 значения выходных напряжений Uвых положительны, а при j = p значения выходных напряжений отрицательны. Для Uвх = const и j = var имеет место фазовый режим ФД, для которого характеристика управления имеет вид Uвых = k'ФД cosj = k'ФД sinj', где j' = p/2 - j, а коэффициент передачи ФД в фазовом режиме с учетом (4.14)
При малых j' характеристика управления
Работа ФД, их характеристики и принципиальные схемы рассмотрены в /1/.
Схемы ЦАП строятся на основе резисторной матрицы, с помощью которой происходит суммирование токов или напряжений так, что выходное напряжение пропорционально входному числу. В составе ЦАП можно выделить три основные части: резисторную матрицу, электронные ключи, управляемые входным числом, и суммирующий усилитель, формирующий выходное напряжение. На рис. 4.14 приведена простая схема нереверсивного ЦАП. Каждому разряду входного двоичного числа An соответствует сопротивление
где R0 -сопротивление младшего разряда. Резистор Ri подключается к источнику питания с опорным напряжением Uоп через электронный ключ Ki, который замкнут при ai =1и разомкнут при ai = 0.Очевидно, что в зависимости от значения ai сопротивление входной цепи для i- гo разряда c учетом (4.15) определится выражением Ri = R0 /(2i ai). (4.16) Тогда для аi = 0 В схеме на рис. 4.14 операционный усилитель У суммирует входные токи и его выходное напряжение с учетом обозначений схемы и выражения (4.16)
Выражение (4.17) вида Uвых = f(An) - это характеристика управления ЦАП. Она имеет ступенчатую форму с дискретностью по напряжению, соответствующей единице младшего разряда, ΔU0 = RосUоп / R0 = kЦАП. Величина ΔU0 является одновременно и усредненным передаточным коэффициентом ЦАП kЦАП. Аналого-цифровой преобразователь (АЦП) решает обратную задачу - преобразует непрерывное по форме входное напряжение в число, например, двоичное. Каждому выходному многоразрядному двоичному числу Ai соответствует диапазон изменения входного напряжения:
где Uэi = ΔU0 i - эталонное значение выходного напряжения, соответствующее выходному двоичному числу Ai; ΔU0 - дискретность по выходному напряжению, соответствующая единице младшего разряда выходного числа. При n -разрядном АЦП общее число отличных от нуля эталонных уровней входного напряжения, отличающихся друг от друга на ΔU0, равно максимальному выходному десятичному числу N=2n - 1. Так как каждый уровень Uэi,согласно (4.18), несет в себе информацию о числе, то в работе АЦП можно выделить основные операции: сравнение входного и эталонного напряжений, определение номера уровня, формирование выходного числа в заданном коде. Усредненный передаточный коэффициент АЦП определяется как обратная величина соответствующего коэффициента ЦАП: kАЦП = 1 / ΔU0. Тогда уравнение характеристики управления АЦП можно записать в виде
Характеристика управления АЦП имеет ступенчатую форму. Схемы реализации АЦП можно разделить на два основных типа: параллельного действия и последовательного действия. Основное достоинство АЦП параллельного действия - высокое быстродействие. Преобразование аналогового входного напряжения в десятичное многоразрядное число происходит всего за два такта работы цифровых элементов схемы. Основной недостаток таких АЦП - большое число аналоговых компараторов и триггеров в составе схемы, равное 2n - 1, что делает многоразрядные АЦП параллельного типа чрезмерно дорогостоящими.
Сравнение Uвх и Uэ выполняется на комбинированном аналоговом компараторе с двумя выходами: «больше» (>) и «меньше» (<). Если Uвх - Uэ > ΔU0 / 2, то единичный сигнал оказывается на выходе >, при этом элемент И1 проводит тактовые им пульсы на суммирующий вход (+1) реверсивного счетчика СР. Растет выходное число СР, и соответственно увеличивается Uэ, формируемое ЦАП. Если Uвх - Uэ < ΔU0 / 2, то единичный сигнал появляется на выходе <, при этом импульсы от генератора тактовых импульсов через элемент И2 проходят на вход вычитания (-1) счетчика СР и Uэ уменьшается. При выполнении условия | Uвх - Uэ | = ΔU0 / 2 на обоих выходах К выделяются нулевые сигналы и элементы И1 и И2 оказываются запертыми для тактовых импульсов. Счетчик прекращает считать, и остающееся на его выходе неизменным число появляется на выходе регистра Р. Разрешение на запись числа в регистр дает единичный сигнал элемента ИЛИ - НЕ, включенного на два выхода К. Рассматривая данную схему относительно Uвх и Uэ, можно установить, что АЦП представляет собой замкнутую по выходной координате систему регулирования с регулятором К релейного действия. Система отслеживает эталонным напряжением на выходе ЦАП изменение входного напряжения с установившейся точностью ± U0 /2 и выдает на цифровом выходе число, соответствующее Uвх. Следящий АЦП позволяет быстро преобразовать только достаточно медленное изменение входного напряжения. Основной недостаток рассмотренного АЦП - плохое быстродействие. В самом неблагоприятном случае, когда скачком задано максимальное напряжение на входе, для выдачи соответствующей выходной величины в цифровом коде потребуется 2n - 1 тактов. Некоторые схемы ЦАП и АЦП и их работа рассмотрены в /1/.
Вопросы для самопроверки
1. Для чего используются в системах автоматики согласующие элементы? 2. Какое преобразование осуществляется фазовым детектором? 3. В каких режимах может работать фазовый детектор? 4. Что является входными координатами фазового детектора? 5. Что является выходной координатой фазового детектора? 6. Что такое амплитудный режим работы фазового детектора? 7. Что такое фазовый режим работы фазового детектора? 8. Для чего могут использоваться фазовые детекторы в системах автоматики? 9. Приведите формулу характеристики управления фазового детектора, работающего в амплитудном режиме. 10. Какое преобразование осуществляется цифрроаналоговым преобразова-телем? 11. Что является входной и выходной координатами цифроаналогового преобразователя? 12. Из каких основных частей состоит схема цифроаналогового преобразователя? 13. Приведите формулы для расчета характеристики управления цифро-аналогового преобразователя и его усредненного коэффициента передачи. 14. Какой вид имеет характеристика управления цифроаналогового преобразователя? 15. Какое преобразование осуществляется аналого-цифровым преобразователем? 16. Что является входной и выходной координатами аналого-цифрового преобразователя? 17. Приведите формулы для расчета характеристики управления аналого-цифрового преобразователя и его усредненного коэффициента передачи. 18. Каких типов бывают аналого-цифровые преобразователи? 19. В чем основные достоинства и недостатки аналого-цифровых преобразователей параллельного действия? 20. В чем основные достоинства и недостатки аналого-цифровых преобразователей последовательного действия? 21. Для чего в схеме следящего аналого-цифрового преобразователя используется цифроаналоговый преобразователь? 22. Чему равна максимальная установившаяся абсолютная ошибка преобразования следящего аналого-цифрового преобразователя? ДАТЧИКИ Вопросы для самопроверки
1. Что является входной и выходной координатами датчика угла поворота? 2. Что является входной и выходной координатами датчика угла рассогласования? 3. В каких системах могут применяться датчики угла и датчики рассогласования? 4. Сколько обмоток и где имеет трехфазный контактный сельсин? 5. Что является входной и выходными координатами сельсина? 6. В каких режимах может работать сельсин? 7. Что такое амплитудный режим работы сельсина? 8. Что такое фазовый режим работы сельсина? 9. Приведите формулу для расчета характеристики управления сельсина в амплитудном режиме работы. 10. Приведите формулу для расчета характеристики управления сельсина в фазовом режиме работы. 11. Какими факторами определяются статические погрешности сельсина, искажающие его характеристику управления? 12. Чем вызвана скоростная погрешность датчика угла поворота на основе сельсина? 13. В каком режиме работают сельсин-датчик и сельсин-приемник в схеме датчика угла рассогласования, если в качестве его выходных координат используются амплитудное значение ЭДС ротора сельсина-приемника и фаза этой ЭДС? 14. Приведите формулу для расчета характеристики управления датчика рассогласования на основе двух сельсинов, работающих в трансформаторном режиме. 15. Что является основными недостатками датчиков угла поворота на основе сельсина? 16. С какой целью на входе датчиков угла поворота используются понижающие измерительные редукторы? 17. С какой целью на входе датчиков угла поворота используются повышающие измерительные редукторы? 18. Как изменяется погрешность измерения угла при использовании понижающих измерительных редукторов? 19. Когда целесообразно использование дискретных датчиков угла? 20. Какие основные элементы присутствуют в конструкции цифрового датчика угла поворота на основе кодового диска? 21. Почему характеристика управления цифрового датчика угла поворота на основе кодового диска имеет ступенчатый характер? 22. Приведите формулу для расчета интервала дискретности цифрового датчика угла поворота на основе кодового диска. 23. Приведите формулу для расчета абсолютной погрешности цифрового датчика угла поворота на основе кодового диска. 24. Путем каких конструкционных мер можно увеличить разрядность цифрового датчика угла поворота на основе кодового диска? Датчики угловой скорости Тахогенератор постоянного тока представляет собой электрическую машину постоянного тока с независимым возбуждением или постоянными магнитами (рис. 5.6). Входная координата ТГ- угловая скорость w, выходная - напряжение Uвых, выделяемое на сопротивлении нагрузки. Так как Eтг = kФw = I(Rтг+Rн), то где
Передаточный коэффициент ТГ, строго говоря, не остается постоянным при изменении скорости из-за нелинейности сопротивления щеточного контакта и реакции якоря. Поэтому в характеристике управления наблюдается определенная нелинейность в зонах малой и большой скоростей (рис. 5.6, б). Нелинейность в зоне малой скорости уменьшают применением металлизированных щеток с малым падением напряжения. Нелинейность характеристики из-за реакции якоря снижается ограничением сверху скорости и увеличением сопротивления нагрузки. При выполнении указанных мероприятий характеристику управления ТГ можно считать практически прямолинейной. На работу ТГ существенное влияние оказывают конструктивно-технологические погрешности. Это коллекторные пульсации напряжения, обусловленные конечным числом коллекторных пластин, пульсации из-за зубцовой конструкции якоря, оборотные пульсации, вызванные несимметрией в
|
|||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-09-18; просмотров: 1330; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.141 (0.013 с.) |


 .
. ,
, .
. . (4.1)
. (4.1)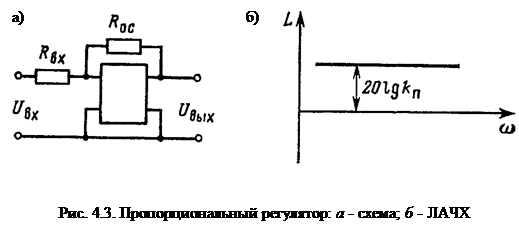

 .
.  (4.4)
(4.4)
 ,
, ,
,
 . (4.6)
. (4.6) ,
, , (4.7)
, (4.7) .
.

 (4.8)
(4.8)
 . (4.9)
. (4.9) , остается далее неизменным. При снятии со входа задающего напряжения (Uз= 0) происходит процесс линейного уменьшения выходного напряжения до нулевого значения (рис. 4.9, б).
, остается далее неизменным. При снятии со входа задающего напряжения (Uз= 0) происходит процесс линейного уменьшения выходного напряжения до нулевого значения (рис. 4.9, б).

 . (4.13)
. (4.13) , то с учетом (4.13)
, то с учетом (4.13) , (4.14)
, (4.14) .
. ;
; .
. Цифроаналоговые преобразователи (ЦАП). Преобразователь согласует цифровую часть системы управления с аналоговой. Входная координата ЦАП - двоичное многоразрядное число An = an-1…ai…a1a0, а выходная координата - напряжение Uвых, формируемое на основе опорного напряжения Uоп (рис. 4.13).
Цифроаналоговые преобразователи (ЦАП). Преобразователь согласует цифровую часть системы управления с аналоговой. Входная координата ЦАП - двоичное многоразрядное число An = an-1…ai…a1a0, а выходная координата - напряжение Uвых, формируемое на основе опорного напряжения Uоп (рис. 4.13). Ri = R0 / 2i, (4.15)
Ri = R0 / 2i, (4.15) , то есть цепь разорвана, а для ai =1 цепь включена и имеет сопротивление R0 /2i.
, то есть цепь разорвана, а для ai =1 цепь включена и имеет сопротивление R0 /2i. . (4.17)
. (4.17) , (4.18)
, (4.18) .
. Существенно меньшие аппаратурные затраты требуются в АЦП последовательного действия. На рис. 4.15 приведена схема следящего АЦП, относящаяся к группе схем последовательного действия. На схеме использованы не упомянутые раньше обозначения: ГТИ - генератор тактовых импульсов, СР - реверсивный счетчик, К - компаратор, Р - выходной регистр. Обозначения логических элементов И, ИЛИ-НЕ общепринятые.
Существенно меньшие аппаратурные затраты требуются в АЦП последовательного действия. На рис. 4.15 приведена схема следящего АЦП, относящаяся к группе схем последовательного действия. На схеме использованы не упомянутые раньше обозначения: ГТИ - генератор тактовых импульсов, СР - реверсивный счетчик, К - компаратор, Р - выходной регистр. Обозначения логических элементов И, ИЛИ-НЕ общепринятые. ,
, - передаточный коэффициент ТГ, В/рад; k = рN/ (2p а) - конструктивная постоянная; Ф - магнитный поток возбуждения; Rтг - сопротивление якорной обмотки и щеточного контакта.
- передаточный коэффициент ТГ, В/рад; k = рN/ (2p а) - конструктивная постоянная; Ф - магнитный поток возбуждения; Rтг - сопротивление якорной обмотки и щеточного контакта.



