
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Промышленных автоматических регуляторовСодержание книги Поиск на нашем сайте Цель работы: изучить структурные схемы и методику расчета настроечных параметров промышленных регуляторов и выполнить на цифровых или аналоговых моделях исследование переходных характеристик регуляторов. Основные теоретические положения и варианты заданий
В промышленных системах автоматики функции регулирования выполняются специальными устройствами – регуляторами. Полная функциональная схема такого регулятора приведена на рис. 7.4.
Рассматриваемые здесь регуляторы - это не просто корректирующие звенья систем автоматического регулирования, а функционально законченные универсальные устройства, пригодные для регулирования параметров различных объектов. Подобные регуляторы широко применяются в системах тепловой автоматики и в системах гидравлической и пневматической автоматики. Для воздействия на регулируемую величину регулятор должен иметь регулирующее устройство, перемещаемое специальным устройством, называемым исполнительным механизмом. Например, при использовании такого регулятора для регулирования расхода воздуха в системе вентиляции в качестве регулирующего устройства может использоваться задвижка, установленная на воздухопроводе и изменяющая его сечение, а в качестве исполнительного механизма - двигатель с редуктором, перемещающий задвижку. Измерительным преобразователем может быть расходомер, а объектом регулирования в данном случае является участок воздушного тракта от нагнетающего вентилятора до места измерения расхода воздуха. Подобные регуляторы по своей конструкции могут быть гидравлическими, пневматическими, электрическими или комбинированными. В дальнейшем будут рассматриваться только электрические регуляторы. Однако следует отметить, что в электромеханических системах, например в системах автоматического электропривода, подобные регуляторы не используются. Принцип действия регулятора поясняется рис. 7.4. Для осуществления автоматического регулирования необходимо измерить текущее значение регулируемой величины X, преобразовать его в сигнал обратной связи Хос и сравнить его с заданным значением сигнала обратной связи Хз. По отклонению Текущее значение регулируемой величины измеряется и преобразуется в сигнал обратной связи устройством, называемым первичным измерительным преобразователем. Заданное значение регулируемой величины, которое определяется заданным значением сигнала обратной связи, устанавливается задающим устройством. Сравнение сигнала обратной связи с его заданным значением производится в суммирующем устройстве. Для повышения точности измерений значений регулируемой величины выходной сигнал измерительного преобразователя обычно имеет небольшую мощность. В связи с этим в регуляторе предусмотрено усилительное устройство, усиливающее сигнал рассогласования При устранении отклонения Типовыми законами регулирования являются пропорциональный (П), пропорционально-интегральный (ПИ) и пропорционально-интегрально-дифференциальный (ПИД). Соответственно этому бывают П-, ПИ- и ПИД- регуляторы. Для повышения степени унификации серийно выпускаемых регуляторов, а также из-за технологических требований к расположению отдельных устройств промышленной системы регулирования из состава автоматического регулятора, как законченной конструктивной единицы, могут исключаться задающее устройство, измерительный преобразователь, регулирующее устройство и во многих случаях еще и исполнительный механизм. Структурная схема электрических автоматических регуляторов содержит устройство формирования закона регулирования в цепи отрицательной обратной связи. Обратная связь охватывает участок прямого канала регулирования с большим коэффициентом усиления (передачи). Передаточная функция такого соединения
где Из последнего выражения следует, что при встречающихся на практике больших значениях коэффициента в прямом канале динамические свойства такого встречно-параллельного соединения определяются, в основном, динамическими свойствами обратной связи, то есть с достаточной точностью
Следует также отметить, что для промышленных автоматических регуляторов, подобных рассматриваемым регуляторам, характерны достаточно большие постоянные времени (обычно от единиц до сотен секунд). Основные типы промышленных регуляторов следующие.
Пропорциональные регуляторы. На рис. 7.5 приведена структурная схема такого П-регулятора, в котором в качестве ИМ используется электродвигатель с редуктором. Входная величина ИМ - напряжение, а выходная - угол поворота. Передаточная функция ИМ
где В соответствии со структурной схемой регулятора его передаточная функция
где Передаточная функция регулятора может быть записана в виде
Таким образом, этот регулятор представляет собой последовательное соединение идеального П-регулятора с передаточной функцией
и некоторого балластного звена с передаточной функцией
где Для увеличения точности регулятора, то есть для приближения его к идеальному П-регулятору, необходимо уменьшать
Бесконечное увеличение точности приближения регулятора к идеальному П-регулятору с ростом  будет наблюдаться только в режиме бесконечно малоизменяющегося сигнала Хз на входе регулятора. В реальных системах максимально допустимое выходное напряжение с выхода усилительного устройства ограничено допустимым входным напряжением исполнительного механизма (по соображениям допустимых для него электрических и механических нагрузок). Поэтому усилительное устройство с большим будет наблюдаться только в режиме бесконечно малоизменяющегося сигнала Хз на входе регулятора. В реальных системах максимально допустимое выходное напряжение с выхода усилительного устройства ограничено допустимым входным напряжением исполнительного механизма (по соображениям допустимых для него электрических и механических нагрузок). Поэтому усилительное устройство с большим  , в основном, работает в релейном режиме переключая свое выходное напряжение между значениями , в основном, работает в релейном режиме переключая свое выходное напряжение между значениями  и и  . .
В связи с вышесказанным, в таких регуляторах часто применяются простые релейные усилители с характеристикой управления, приведенной на рис. 7.6. На рис. 7.6 приняты следующие обозначения: Umax - максимальное выходное напряжение усилителя; e - ошибка регулирования (входное напряжение усилителя); eср - значение ошибки срабатывания; eот - значение ошибки отключения; d - зона нечувствительности. Неоднозначность характеристик такого усилителя связана с присущим релейным элементам гистерезисом. При уменьшении зоны нечувствительности растет точность регулятора, однако увеличивается частота включений ИМ, что ведет к его повышенному износу. Ширина зоны нечувствительности должна быть максимально допустимой по соображениям точности регулирования и настраивается в системе, содержащей регулятор и объект регулирования. Пропорционально-интегральные регуляторы. Схема промышленного ПИ-регулятора может быть с охватом ИМ отрицательной обратной связью, как показано на рис. 7.7, или без охвата ИМ обратной связью, как показано на рис. 7.8. Передаточная функция регулятора, приведенного на рис. 7.7, равна
Регулятор реализует ПИ-закон регулирования
с погрешностью, вносимой балластным звеном
где  - коэффициент передачи регулятора; - коэффициент передачи регулятора;  - время изодрома. - время изодрома.
Для увеличения точности реализации ПИ-закона регулирования необходимо максимально возможно увеличивать коэффициент Если исполнительный механизм имеет передаточную функцию вида (7.2), то после несложных преобразований выражение (7.3) приводится к виду
где Передаточная функция регулятора, приведенного на рис. 7.8, равна
После несложных преобразований выражение (7.4) преобразуется к виду
где коэффициент передачи регулятора Пропорционально-интегрально-дифференциальные регуляторы. Передаточная функция такого ПИД- регулятора:
где Если весь регулятор охвачен отрицательной обратной связью и общий коэффициент передачи прямой цепи намного больше единицы, передаточная функция цепи обратной связи будет равна
После разложения знаменателя на множители имеем
 . .
Структурная схема такого регулятора приведена на рис. 7.9. При достаточно большом коэффициенте передачи прямой цепи данный регулятор достаточно точно реализует ПИД-закон регулирования (7.5). При этом параметры настройки регулятора равны:
На рис. 7.10 приведена структурная схема ПИД-регулятора, использующая интегрирующие свойства механизма. При достаточно большом коэффициенте передачи
В таких регуляторах тоже часто применяются простые релейные усилители с характеристикой управления, приведенной на рис. 7.6.
В лабораторной работе определяются настроечные параметры регуляторов расхода (например, для технологических установок химического производства) и исследуются их переходные характеристики. В качестве исполнительного механизма применяется электродвигатель с редуктором, перемещающий задвижку, изменяющую сечение трубопровода и, соответственно, расход жидкости или газа через него. Двигатель допускает прямой пуск путем подачи на него напряжения, не превышающего значения Umax, скорость двигателя прямо пропорциональна поданному на него напряжению. Входная координата регулятора напряжение, меняющееся в пределах от 0 до +10 В, выходная координата – положение задвижки, прямо пропорциональное углу поворота вала двигателя. Варианты задания приведены в табл. 7.2. (Вариант задается преподавателем).
Таблица 7.2
Программа работы
1. Изучить структурные схемы и методику расчета настроечных параметров промышленных регуляторов. 2. Для указанного варианта задания рассчитать настроечные параметры регуляторов. Расчет производить для случая конечного значения коэффициента усиления усилителя 3. С использованием цифровой или аналоговой модели получить кривые переходных характеристик регуляторов 4. Сравнить полученные переходные характеристики реальных промышленных регуляторов с переходными характеристиками аналогичных идеальных регуляторов и вы-яснить, как влияют на точность реализации законов регулирования значения
Методические указания
Структурные схемы регуляторов и расчет их настроечных параметров достаточно полно изложены в описании лабораторной работы, а также в /11/. При использовании усилителей с релейной характеристикой явлением гистерезиса можно пренебрегать, то есть считать, что
Отчет должен содержать: цель работы; функциональную схему промышленного регулятора; структурные схемы исследуемых регуляторов; расчет настроечных параметров регуляторов; результаты моделирования переходных характеристик с указанием условий моделирования.
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-09-18; просмотров: 795; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.214 (0.009 с.) |


 = Х - Хос выработать регулирующее воздействие Хр на объект регулирования, направленное на ликвидацию отклонения величины Хос от заданного значения Хз.
= Х - Хос выработать регулирующее воздействие Хр на объект регулирования, направленное на ликвидацию отклонения величины Хос от заданного значения Хз. ,
, - передаточная функция участка прямого канала регулирования;
- передаточная функция участка прямого канала регулирования;  - передаточная функция участка обратной связи.
- передаточная функция участка обратной связи. .
.
 , (7.2)
, (7.2) - постоянная времени исполнительного механизма.
- постоянная времени исполнительного механизма. ,
, - постоянная времени.
- постоянная времени. .
.
 ,
, - постоянная времени апериодического балластного звена;
- постоянная времени апериодического балластного звена;  -коэффициент передачи регулятора.
-коэффициент передачи регулятора. или увеличивать произведение
или увеличивать произведение  . Значение
. Значение  также должно быть определенным, так как от него зависит требуемый коэффициент регулятора
также должно быть определенным, так как от него зависит требуемый коэффициент регулятора 
 . (7.3)
. (7.3)
 ,
,
 .
.
 - коэффициент балластного звена;
- коэффициент балластного звена;  - постоянная времени балластного звена.
- постоянная времени балластного звена. . (7.4)
. (7.4) ,
, , а постоянная времени балластного звена
, а постоянная времени балластного звена  .
.
 , (7.5)
, (7.5) - постоянная времени изодрома;
- постоянная времени изодрома;  - постоянная времени предварения.
- постоянная времени предварения. .
.
 ;
;  ;
;  .
. ;
;  .
.
 ,
В
,
В
 ,
с
,
с

 при ступенчатой форме входного сигнала, показанной на рис. 7.11, для случая конечного и бесконечного значения коэффициента
при ступенчатой форме входного сигнала, показанной на рис. 7.11, для случая конечного и бесконечного значения коэффициента  ). Моделирование проводить для структур регуляторов с исполнительными механизмами, охваченными и неохваченными обратной связью.
). Моделирование проводить для структур регуляторов с исполнительными механизмами, охваченными и неохваченными обратной связью.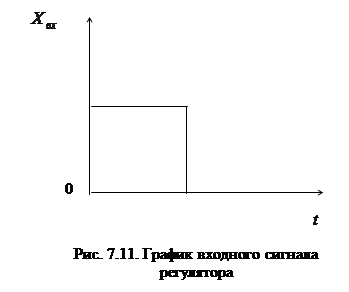
 . Ширину зоны нечувствительности
. Ширину зоны нечувствительности  выбирать из условия, что переходный процесс в регуляторе закончится за два - три переключения релейного усилителя.
выбирать из условия, что переходный процесс в регуляторе закончится за два - три переключения релейного усилителя.


