
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Элементы и функциональные устройстваСодержание книги Похожие статьи вашей тематики
Поиск на нашем сайте
Элементы и функциональные устройства Судовой автоматики
Конспект лекций для студентов направления 6.0922 «Электромеханика» специальности 6.092200 «Электрические системы и комплексы транспортных средств» дневной и заочной форм обучения
Керчь, 2006
Автор: Матеух Евгений Иванович, ст. преподаватель кафедры ЭСиАП КМТИ. Рецензент: Савенко А.Е. ст. преподаватель кафедры ЭСиАП
Конспект лекций рассмотрен и одобрен на заседании кафедры ЭСиАП КМТИ., протокол № 4 от 19.12.2005 г.
Конспект лекций рассмотрен и рекомендован к утверждению на заседании Методического совета КМТИ КМТИ., протокол № 5 от 27.02.2006 г.
Конспект лекций утвержден на заседании Ученого Совета КМТИ, протокол № 6 от 2.03. 2006 г.
Ó Керченский морской технологический институт Задачей автоматических устройств является получение, передача, преобразование, обработка, хранение и сравнение информации; формирование новой информации; использование информации для воздействия на управляемый процесс. Информацию выражают в виде сигналов. Под сигналом подразумевают условное изменение вещественного (длина, цвет, форма и т.д.) или энергетического параметра (тока, напряжения, давления и т.п.), однозначно связанное с воспринимаемой или передаваемой информацией. В автоматических устройствах в качестве сигналов используют энергетические параметры, так как их легко генерировать, формировать, преобразовывать. В качестве сигналов применяются следующие параметры: 1.При использовании электрической энергии – величина постоянного тока и напряжения; амплитуда, длительность импульсов, промежуток между импульсами, частота, число или код из импульсов постоянного тока; амплитуда напряжения, амплитуда тока, частота или фаза переменного тока; амплитуда, длительность, промежуток между импульсами и частота импульсов, число импульсов или код из импульсов переменного тока. 2.При использовании энергии сжатого воздуха (пневматической) или газа – величина давления; величина потока воздуха (газа). 3.При использовании энергии жидкости под давлением - величина давления; величина потока рабочей жидкости. 4. При использовании механической энергии – величина усилия (момента), величина перемещения (линейного или углового), величина скорости (угловой). В процессе работы автоматических устройств с сигналами приходится производить следующие основные операции: · получение сигнала, однозначно связанного с информацией о контролируемом параметре; · преобразование сигнала по роду энергии; · преобразование сигнала по виду (например, непрерывного в импульсный и т.д.); · преобразование сигнала по величине (усиление); · преобразование сигнала по функциональной зависимости (между входным и выходным сигналами); · сравнение сигналов; · логические операции с сигналами; · распределение сигналов по различным путям; · хранение сигналов; · использование сигналов для воздействия на управляемый процесс. Простейшие автоматические устройства, предназначенные для выполнения одной из указанных основных операций, называются элементами. В ряде случаев элементы строятся так, что одновременно выполняют две и более операции с сигналами. Из элементов совместно с источниками питания и другими вспомогательными частями образуются основные функциональные автоматические устройства. Функциональные автоматические устройства в необходимых сочетаниях образуют системы автоматического контроля, регулирования и управления. Функциональная связь Элементы автоматических устройств, производя операции с сигналами, осуществляют функциональное связывание изменений параметра х в одном (управляющем) процессе с изменением другого параметра у в следующем (управляемом) процессе. Функциональная связь может быть непрерывная, когда непрерывному изменению параметра х от х мин до хмакс отвечает непрерывное изменение у от у мин до у макс. Зависимость у=f (х)называется характеристикой управления (иногда ее также называют статической характеристикой элемента). Часто характеристика управления обладает гистерезисом, т. е. Изменеия параметра у=f (х) при увеличении и уменьшении параметра х не будет совпадать между собой. Наличие гистерезиса обычно является нежелательным, и при проектировании элементов это необходимо учитывать, устраняя части, обладабщие магнитным, электрическим или механическим гистерезисом или значительным сухим трением (рис.1, а). В другом случае непрерывному изменению параметра х отвечает скачкообразное (релейное) изменение параметра у. При этом непрерывному изменеию параметра х в пределах от х= 0 до х=х сраб отвечает неизменное (или почти неизменное) значение параметра у=у мин. При достижении параметра х значения х=х сраб параметр у изменяется скачком от значения у=у мин до значения у=у макс. При дальнейшем возрастании х до наибольшей величины х=х макс значение параметра у будет оставаться неизменным (или почти неизменным). При уменьшении параметра х от х макс обратное изменение у от значения у = у максдо у = у мин произойдет при некотором значении х = х отп; обычно х отп < х ср, и таким образом здесь также имеет место гистерезис в характеристике управления у = f (x). При уменьшении х от х отп до х = 0 значение у = у мин будет оставаться неизменным.
Рис.1 Элементы с такой скачкоообразной характеристикой управления носят название реле (релейного элемента) (рис.1, б). Характеристика рис. 1, в является особой разновидностью релейной характеристики управления. Обратное изменение параметра у от значения у=у макс до значения у=у мин происходит при значении х=х отп<0. Обычно значение х отп≈- х сраб. Для срабатывания реле (релейного устройства) с такой характеристикой управления достаточно воздействия величины х ≥ х сраб в течение времени, необходимого для перевода из внерабочего состояния, соответствующего значению у=у мин, в рабочее состояние,, соответствующее у=у макс. После превращения воздействия величины х реле (релейное устройство) остается в рабочем состоянии (и значение у будет оставаться у=у макс). Для возвращения во внерабочее состояние (т. е. когда у=у мин) нужно подать воздействие х<х отп в течение времени, равного (или несколько большего) времени перехода реле из рабочего состояния во внерабочее. Такие релейные элементы, обладающие «памятью» о величине и знаке последнего оказанного на них воздействия, находят широкое применение. Элементы, служащие для получения информациио значении контролируемых параметров, носят название: при непрерывной связи контролируемого параметра х и управляемого параметра у, т. е. при непрерывной характеристике управления у=f (x),-датчиков сигналов; при скачкообразной связи, т. е. при скачкообразной характеристике у=f (x), - реле. Развиваются при этом два вида датчиков. Первый – когда энергия, получаемая в элементе при изменении контролируемого (входного) параметра х, преобразуется в другую форму, связанную с изменением выходного параметра у. Второй – когда энергия, получаемая в элементе при изменении контролируемого параметра х, затрачивается лишь на изменение параметров, определяющих режим в какой-то вспомогательной (выходной) энергетической цепи. Величина энергии в этой цепи определяется свойством источника энергии и параметрами вспомогательной выходной цепи. Первый вид элементов называется датчиками-генераторами, второй - датчиками-модуляторами. Величину выходного сигнала, выработанного датчиком или реле, можно рассматривать как управляющий входной параметр х для следующего элемента т. д. Если задачей последующего элемента является получение большего уровня выходного сигнала, чем уровень входного сигнала, то такой элемент носит название усилителя. Если задачей элемента является получение меньшего изменения выходного сигнала (ограничение изменения выходного сигнала) по сравнению с изменениями входного сигнала, то такие элементы называются стабилизаторами (модераторами). У усилителей и стабилизаторов вид энергии на входе (т. е. в управляющем процессе) одинаков (например, электрическая энергия и т. д.). Элементы, используемые для передачи сигналов на расстояние, носят название элементов дистанционной связи. Элементы, применяемые для преобразования сигналов по времени или величине, соответственно называются элементами (например, реле) времени и счетно-решающими элементами; элементы, служащие для распределения сигналов по времени или направлению, - распределителями; элементы, предназначенные для воздействия на управляемый процесс, - исполнительными элементами. Примеры объединения элементов в группы типовых звеньев Все элементы автономических систем в зависимости от их характеристик в установившихся и переходных режимах можно разделить на определенные группы простейших звеньев. а) идеальные (безынерционные) звенья Уравнение динамики идеального звена имеет вид Х вык(t) = r Xвх (t) (1) В оперативной форме Х вык(р) = r X вх(р) (2) Передаточная функция идеального звена W (p) = Примерами конструктивного выполнения идеального звена могут быть: · жесткий механический рычаг; · механический редуктор; · потенциометр; · электронная усилительная лампа; · полупроводниковый триод и др., если уравнения их динамики можно представить уравнением (1). б) инерционное (апериодическое) звено первого порядка Уравнение динамики инерционного звена первого порядка имеет вид
где T – постоянная времени, обусловленная наличием массы, момента инерции, индуктивности, емкости и т.д.; r – коэффициент усиления (или передачи). Оперативное уравнение
Передаточная функция
Примерами инерционного звена первого порядка являются: · пассивные четырехполюсники, состоящие из сопротивления и индуктивности или из сопротивления и емкости; · термопара, а также (при определенных допущениях) магнитный усилитель; · генераторы постоянного и переменного тока; · электрические двигатели (если вход – ток якоря, а выход – угловая скорость) и т.д., если уравнения их динамики можно представить в виде (4). в) интегрирующее звено Уравнение динамики: или Где ka – коэффициент пропорциональности. Операционное уравнение
Передаточная функция
Примерами интегрирующего звена являются:
г) инерционные звенья второго порядка Уравнение динамики инерционного звена второго порядка имеют вид:
где Т – постоянная времени;
к - коэффициент усиления (или передачи). В операторной форме:
Передаточная функция:
Примерами выполнения инерционных звеньев второго порядка могут быть:
д) консервативное звено Уравнение динамики: Это частный случай звена второго порядка, когда отсутствует демпфирование (ρ =0) Передаточная функция:
Примером консервативного звена может быть идеальный пассивный четырехполюсник, состоящий из L и C и другие элементы, если уравнения их динамики имеет вид уравнения (13). е) дифференцирующие звенья Уравнения динамики:
если Примерами могут быть: · Электрические цепи содержащие L и C; · Демпфер с пружиной · Тахогенератор, и др. если уравнения динамики имеют вид уравнений(15,16,17). 3. Элементы с непосредственным преобразованием Элементы по своему устройству могут быть разделены на элементы с непосредственным преобразованием и элементы промежуточными преобразованиями. В элементах с непосредственным преобразованием изменение управляющего (входного) параметра х непосредственно вызывает изменение выходного параметра y. Наиболее часто выходным параметром y в непрерывных электрических управляемых процессах является напряжение, ток, фаза или частота. Для этого необходимо, чтобы под воздействие входного параметра x происходило изменение сопротивление Rx, индуктивности Lx, ёмкости Cx или ЭДС Ex. Элементы с изменяющимися параметрами Rx, Lx и Cx относятся к элементам модуляторам, элементы с изменяющейся Eх – к элементам - генераторам. Датчики с непосредственным преобразованием могут работать и в релейном режиме, т.е. при достижении заданного значения управляющего (входного) параметра х=х сра б скачком изменять управляемый (выходной) параметр у от у=у мин до у=у макс. Релейный режим работы может быть получен путём введения в схему положительной обратной связи. Примером может быть магнитный усилитель при работе в релейном режиме. 4. Элементы с промежуточным преобразованием В ряде случаев не удаётся построить элементы с непосредственным преобразованием либо потому, что неизвестны явления, у которых наблюдалась бы необходимая связь между изменением контролируемого (управляющего, входного) параметра х и изменением управляемого (выходного) параметра у, либо эти явления известны, но связь между ними недостаточно определённая вследствие значительного влияния посторонних факторов. В этом случае прибегают к построению элементов с рядом промежуточных преобразований: ищут в начале однозначную связь между параметром х и некоторым вспомогательным параметром v, затем находят однозначную связь, между параметром v и у либо, если такой связи не удаётся найти, с другим промежуточным параметром и, а затем уже связь между и и у. В этом случае имеем, что
Чаще всего используется преобразование х в механическую величину: усилие, перемещение или скорость.
Рис.2 На рис.2 показана структурная схема элемента с промежуточными преобразованиями: входная часть элемента (датчика или реле), в которой изменение управляющего (входного) параметра преобразуется в изменение первого из промежуточных параметров, называется воспринимающим или чувствительным органом (ВО), выходная часть элемента,. изменение параметра которой вызывает изменение величины управляемого (выходного) параметра у, называется исполнительным органом (ИО); часть элемента, лежащая между воспринимающим и исполнительным органами, называется промежуточным органом (ПО) Схемы формирования сигналов Схемы формирования электрических сигналов при наличии элементов–генераторов Простейший случай включения элементов-генераторов (Е =var) показан на рис.4. Величина тока в цепи нагрузки
Рис.4 где R 0 – внутреннее сопротивление элемента;
R Н- сопротивление нагрузки (приемника);
Величина напряжения на нагрузке при этом будет равна:
а выходное напряжение элемента-генератора U x= E x – IR 0 . Зависимость U x= f (E x, I) называется выходной (или нагрузочной) характеристикой элемента генератора. При «приемнике напряжения»
Рис.5 Величина мощности, выделяемой в нагрузке, равна:
Наибольшее значение Р Н отвечает условию RН=R0∑ . В компенсационной схеме (рис.5) значение тока в нагрузке (приемнике) равно:
где U0 – величина компенсационного напряжения; rab - сопротивление между точками а и b схемы. Напряжение на нагрузке R Н равно
Иногда включают элемент-генератор в плечо мостовой схемы (рис.6). Величины сопротивлений
При этом ток в диагонали равен: Рис.6
Схемы формирования электрических сигналов при наличии элементов-модуляторов В общем случае зависимость между током I и падением напряжения Ú на элементе-модуляторе
Здесь Х – величина внешнего воздействия. Обычно можно считать, что где В случае, если Для цепи, состоящей из последовательно включенных элементов модулятора и нагрузки, имеем
следовательно,
или при
Для построения схем формирования сигнала существенно знать, как будет изменяться напряжение и ток в цепи или угол сдвига фаз Имеем для тока в последовательной цепи (рис.7), что
Рис.7 где В случае наиболее распространенной мостовой схемы включения (рис.8) справедливы следующие основные управления:
где Z 5 – сопротивление измерительной диагонали;
I 5 – ток в измерительной диагонали.
Рис.8 Датчики величины усилия Данную группу составляют датчики, использующие следующие зависимости:
Lx = f( 3. Изменение емкости от величины усилия. Cx = f( 4. Изменение э. д. с. от величины усилия. Ex = f( Датчики с изменяющимся активным сопротивлением Простейшим датчиком усилий с изменяющимся сопротивлением может служить проволока, растягиваемая силами Рх (рис.17,а). Так как сопротивление проволоки равно:
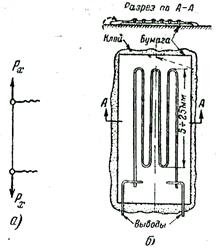
Рис.17 Сила Рх связана с удлинением проволоки по закону Гука:
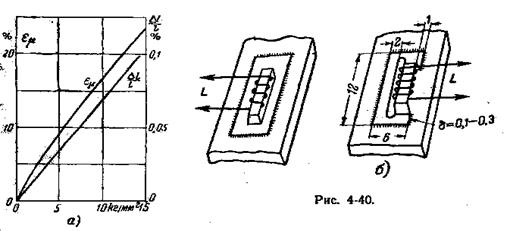
где Е – модуль упругости материала проволоки датчика, кГ/см2. Обычно чувствительность датчиков лежит в пределах S = 2-5 (до 12). Проволочные датчики широко используются в качестве тензометров, т.е. измерителей напряжений и удлинений в различных частях конструкций. Проволочный датчик-тензометр представляет собой ряд петель (от 2 до 40) длиной 5-25 мм, реже до 100 мм, шириной 0,8-10 мм, из проволоки с d = 0,002 – 0,05 мм, который наклеивается на бумажную подкладку, а сверху заклеивается защитной бумажной полоской (рис.17, б). Проволочный датчик-тензометр наклеивается на тщательно защищенную часть конструкции при помощи клея (целлюлозного, бакелитового, карбинольного, резинового, воскового) или какого-либо цементирующего состава. Проволочные датчики обладают малой инерционностью и не имеют гистерезиса. Включение датчиков обычно производится по схеме моста или потенциометра (рис.18)
Рис.18 Наряду с проволочными датчиками широкое распространение имеют датчики из полупроводниковых материалов. В качестве последних применяются искусственные составы («тензолиты»): 1. Графит + тонкий кварцевый песок и смола. 2. Графит + мел + шеллак (или канифоль). 3. Уголь (или сажа) + бакелитовый лак. Датчики изготавливаются обычно или в виде полосок (длиной l = 40-60 мм, шириной b = 4-6 мм, толщиной h = 1-30 мм), или в виде нитей (d = 1-2 мм), или в виде слоя на изолирующей подкладке. Датчики из тензолитов обладают большей чувствительностью (до S = 300), но часто имеют нестабильные характеристики, малую механическую прочность и большой гистерезис. Датчики с изменяющей и взаимной индуктивностью. Изменение магнитной проницаемости ферромагнитных материалов при наличии в них механических напряжений может быть использовано для датчиков, у которых Величина относительного изменения магнитной проницаемости является функцией следующих параметров:
а значение чувствительности датчика по отношению к механическим напряжениям рх
где Н – величина напряженности намагничивающего поля;
Максимальная чувствительность датчика В качестве материала магнитоупругих датчиков обычно применяют никелево-железные сплавы. Зависимость относительного изменения магнитной проницаемости от величины механических напряжений
в области упругих деформаций и малого относительного удлинения для отожженного пермаллоя (78,5% Nі) приведена на рис.19. В качестве материала для датчика можно рекомендовать также сплав 65% Nі и35% Fе. Часто датчики-тензометры предварительно тренируют путем многократных деформаций. На рис.19, б показано устройство двух типов датчиков для измерения напряжений и деформаций. Включение датчиков обычно осуществляют по мостовой схеме.
Рис.19 Температурные погрешности при этом доходят до 1% на 1ºС. Поэтому часто для компенсации температурных влияний два одинаковых датчика, находящихся в одинаковых температурных условиях, включают в смежные плечи мостовой схемы. Питание мостовых схем с подобными датчиками осуществляют от источника переменного тока повышенной частоты (f = 5 000 – 50 000 гц). Датчики с изменяющейся емкостью Для ряда материалов существует зависимость относительного изменения диэлектрической проницаемости от величины механических напряжений Чувствительность датчика будет равна:
Включение датчика осуществляется по мостовой или дифференциальной схеме. Составляя столб из ряда (n) датчиков так, чтобы на них воздействовала одна и а же сила Рх, соединяя обкладки параллельно, можно получить достаточно большое значение емкости датчика CΣ =nC и увеличить значение проводимости датчика Датчики с изменяющейся ЭДС (пьезоэлектрические датчики) Устройство датчиков давления с изменяющейся ЭДС основано на использовании пьезоэлектрического эффекта. На рис.20 показано расположение осей: Z – оптической, Х – электрической и Y – нейтральной как в кристалле кварца, так и в пластинке датчика, которую обычно вырезают из кристалла. При действии силы Рх вдоль оси Х на гранях пластинки fx появятся заряды (так называемый продольный пьезоэффект), величина которых определяется следующей зависимостью: qx = k0Px/ При действии силы Ру вдоль оси Y на тех же гранях Рис.20 пластинки fx появятся заряды (так называемый поперечный пьезоэффект), величина которых определяется как
где fх и fу - площади граней пластинки, перпендикулярные осям Х и Y. При действии силы РΖ вдоль оси Z пьезоэффект не наблюдается. Заряды противоположных граней пластинки fx равны между собой и имеют разные знаки. Знаки зарядов определяются напряжением силы Рх (сжатие или растяжение). Коэффициент k0 называется пьезоэлектрической постоянной или модулем. Значение k0: для кварца k0 =
где С - емкость датчика;
d – толщина пластинки, см; fx - площадь грани, перпендикулярной оси Х, см; С0 – емкость присоединенной к датчику схемы (емкость проводов, промежутка сетка – катод усилительной лампы и т. п.). Чувствительность датчика определяется как
В качестве материала для пластин датчиков чаще всего используют кварц, так как турмалин дорог, а сегнетова соль изменяет свои параметры при изменении температуры и влажности. В последнее время в качестве материала для пластин широкое распространение титанат бария Датчики скорости Датчики с изменяющимся активным сопротивлением Данную группу составляют датчики, принцип действия которых основан на изменении охлаждения нагретой током проволоки или цилиндра в зависимости от скорости потока воздуха, газа или жидкости (рис.21). Для установившегося состояния нагрева имеем, что
где
если
то
где
здесь
d – диаметр нити, см;
то при
Тогда сопротивление нити в зависимости от скорости потока или жидкости ее определится следующей зависимостью: Рис.21 Чувствительность рассматриваемого датчика по отношению к изменению скорости потока газа и жидкости равна:
Следует отметить, что чувствительность изменяется при отклонении потока от перпендикуляра к оси нити. При этом дополнительное приращение сопротивления проволоки, равно:
где
Для чистой платины Зная предельную температуру из уравнения теплового баланса, можно найти необходимый ток накала нити
Входной величиной датчиков данного типа может быть как скорость движения потока газа или жидкости относительно неподвижного твердого тела, так и скорость твердого тела относительно газа или жидкости. Включение датчика осуществляется по мостовой или дифференциальной схеме. В частности, дифференциальный датчик скорости используется для контроля утечки газа при разрыве или повреждении трубопровода. В последнее время с большим успехом в датчиках скорости применяются вместо металлических нитей (проволок) термисторы цилиндрической шаровой формы; схемы включения их остаются те же, что и в вышерассмотренных случаях. Электромашинный усилитель с Поперечным полем (ЭМУ с ПП)
ЭМУ применяется в системах автоматики: автоматика, привод постоянного тока, следящие системы; или как возбудитель генератора. ЭМУ с ПП это генератор постоянного тока с двумя парами щеток, расположенными во взаимно перпендикулярных плоскостях.
Щетки 1-1 находятся на геометрической нейтрали и замкнуты накоротко ток в Wy создает в машине небольшой Фу, в результате чего при вращении якоря ЭМУ приводим двигателем будет индуцировать небольшая Е1.
Так как щетки 1-1 замкнуты накоротко, Е1 создает в обмотке якоря большой ток I1, который
|
|||||||||||||||
|
|
Последнее изменение этой страницы: 2016-09-18; просмотров: 501; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.138.113.44 (0.012 с.) |

 = r (3)
= r (3) , (4)
, (4) , (5)
, (5) , (6)
, (6)
 (7)
(7)
 (8)
(8) (9)
(9) , (10)
, (10) - коэффициент демпфирования;
- коэффициент демпфирования; (11)
(11) (12)
(12) (13)
(13) (14)
(14) (идеальное диф. звено) (15)
(идеальное диф. звено) (15) - эквивалентный коэффициент усиления
- эквивалентный коэффициент усиления (реальное диф. звено без статизма) (16)
(реальное диф. звено без статизма) (16) (реальное диф. звено со статизмом), (17)
(реальное диф. звено со статизмом), (17) или ПИД (пропор. диф.)
или ПИД (пропор. диф.) .
.

 ,
, - суммарное сопротивление соединительных проводов;
- суммарное сопротивление соединительных проводов; .
. ,
, и
и  . При «приемнике тока» обычно берется
. При «приемнике тока» обычно берется  и
и и
и  .
.
 .
.
 ,
, .
.
 ,
,  и
и  выбирают так, чтобы
выбирают так, чтобы .
. .
. , где
, где  .
. ,
, .
. , получим, что
, получим, что  не зависит от І и U будет существовать линейная зависимость:
не зависит от І и U будет существовать линейная зависимость:  .
. или
или  ,
,

 .
. , если сопротивление
, если сопротивление  (или индуктивность
(или индуктивность  , или емкость
, или емкость  ) изменяет свое значение в функции х.
) изменяет свое значение в функции х. ,
, - эквивалентная э. д. с.1
- эквивалентная э. д. с.1 , где
, где  ;
; ;
; ;
; ;
; ,
,
 ;
; );
); ;
или
;
или
 ,
то
,
то
 .
Чувствительность датчика определяется как
.
Чувствительность датчика определяется как
 ,
где
,
где  - коэффициент Пуассона.
- коэффициент Пуассона.
 ;
;
 .
. ,
, ,
, - изменение температуры датчика.
- изменение температуры датчика. макс будет иметь место при Н=Н опт, которая соответствует
макс будет иметь место при Н=Н опт, которая соответствует  макс.
макс.

 . Эта зависимость может быть использована для построения емкостных датчиков, реагирующих на величину усилий. При этом диэлектрическая проницаемость в зависимости от величины давления определяется как
. Эта зависимость может быть использована для построения емкостных датчиков, реагирующих на величину усилий. При этом диэлектрическая проницаемость в зависимости от величины давления определяется как  .
.
 СΣ.
СΣ.
 ,
, для турмалина k0 =
для турмалина k0 =  ; для сегнетовой соли k0 =
; для сегнетовой соли k0 =  . Датчик представляет собой пластинку кристалла с нанесенными на гранях fx обкладками. Напряжение между обкладками, т. е. между гранями fx, равно:
. Датчик представляет собой пластинку кристалла с нанесенными на гранях fx обкладками. Напряжение между обкладками, т. е. между гранями fx, равно: ,
, ;
; - диэлектрическая постоянная материала пластинки;
- диэлектрическая постоянная материала пластинки; .
. .
. ,
, - коэффициент теплоотдачи, вт/см 2
- коэффициент теплоотдачи, вт/см 2  град;
град; - площадь поверхности охлаждения;
- площадь поверхности охлаждения; - температура проволоки;
- температура проволоки; - температура окружающей среды;
- температура окружающей среды; > 0,08,
> 0,08, ,
, ;
;  ;
; - теплопроводность среды, вт/см
- теплопроводность среды, вт/см  - плотность газа или жидкости, г/см3;
- плотность газа или жидкости, г/см3; - теплоемкость при постоянном объеме, дж/г
- теплоемкость при постоянном объеме, дж/г  - скорость движения газа или жидкости, см/сек.
- скорость движения газа или жидкости, см/сек. Так как сопротивление нити равно:
Так как сопротивление нити равно: ,
, = const согласно вышеприведенному уравнению теплового баланса для перегрева нити будем иметь:
= const согласно вышеприведенному уравнению теплового баланса для перегрева нити будем иметь: .
. .
. .
. ,
, и
и  - коэффициенты.
- коэффициенты. ,
,  = (3,8 - 4)×103ºС и
= (3,8 - 4)×103ºС и  ºС и
ºС и  ºС.
ºС.
 .
.



