
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Датчики угла рассогласованияСодержание книги Поиск на нашем сайте
ДУ – устройства, преобразующие угловую координату в электрическое напряжение. Это напряжение используется в системах автоматов как сигнал обратной связи по углу или как управляющий сигнал в задающих устройствах. Датчики угла применяются в следящих системах для измерения угла поворота исполнительного вала. Задание на поворот исполнительного вала может выполняться также и с помощью датчика угла, угловой координатой которого является угол поворота командной оси, разность сигналов этих двух датчиков, о рассогласовании подается в систему автоматики как управляющий сигнал, в этом случае оба датчика рассматриваются как датчик рассогласования. Задание на угловое перемещение исполнительного вала может формироваться и без датчика угла с командной осью. В этом случае использование эквивалентной командной оси, т.е. задание угловой координаты выступает в закодированном виде (в форме цифровой команды и др.). В таких системах с программным управлением выходной сигнал датчика выдается в программное устройство задания двигателя. Могут использоваться в качестве датчика угла: 1. Потенциометр 2. Командоаппарат 3. Фазовращатель Для датчика и рассогласования большое применение нашли сельсины и вращающиеся трансформаторы.
Сельсин
Машина переменный ток с двумя обмотками: однофазная возбуждения, трехфазная – синхронизации. По конструктивному признаку сельсин делится на контактные и бесконтактные. Основное исполнение первого типа. ОВ на роторе, синхронизация – на статоре.
Бесконтактные: 1. Способ конструкции ротора, специальной конструкции обмотки возбуждения, кольцевая на статоре. 2. ОВ на роторе и получает питание от вращающейся совместно с ротором вторичной обмотки трансформатора (это кольцевой трансформатор) проще, чем первая. В схемах датчика угла входная координата сельсина. Угол поворота его ротора или фаза выходного напряжения. По отношению к опорному напряжению.
В зависимости от использования той или иной выходной координаты различают амплитудный режим, когда фаза постоянная (0 или 180), а напряжение выходное зависит от q (угла поворота ротора) и режима фазовращателя, когда напряжение равно const а фаза зависит от угла поворота.
В амплитудном режиме ОВ получает питание от сети переменного тока.
Uв=Uвт *sinωt Магнитный поток, действующий по оси обмотки возбуждения наводит соответствующую ЭДС в фазах обмотки статора.
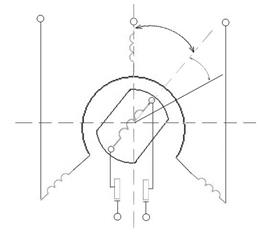
Кт – коэффициент трансформации между фазной и роторной обмотками. На рис 1 за начало отсчета принята ось обмотки фазы А. Линейная ЭДС (разность между фазным ЭДС). Между А и В.
Если начало отсчета угла q от фазы А (рис. 1) в направлении фазы В то линейная ЭДС будет определяться разностью соответствующих фазных ЭДС.
Элемент – системы автоматически понимают – устройство входящее в состав САУ как конструктивная или техническая единица выполняющая определенную функцию и обладает простыми свойствами между ее входными и выходными величинами.
Если начало отсчета угла поворота ротора переместить на п/з в направлении к фазе В, то относительно нового угла отсчета q`=p/3-q То е линейное будет
Характеристика управления сельсина в этом случае приобретает синусоидальный вид.
Положительное значение линейной максимальной ЭДС соответственно при фазе φ =0 отрицательное φ=p Если q` мал, то sinq`≈q` (до градуса)
Елт=Кс q`
Кс= UВт – выходное максимальное напряжение. Полученное выражение для характера управления (Елт=Кс q`) и передаточного коэффициента Кс не учитывают погрешностей, вносимых в передачу сельсинов не синусоидальным напряжением магнитной индукции, асимметрией фаз статорной обмотки. Эти факторы обуславливают статические погрешности в зависимости от класса точности сельсина, характеризующего определённый уровень погрешности. Наибольшее влияние они оказывают в области малых углов, где положительный сигнал соизмерим с погрешностью. Кроме статической погрешности превращений, появляется скоростная погрешность из-за появления в обмотках сельсина ЭДС вращения (чем больше угловая скорость, тем больше эта погрешность). Поэтому рабочие режимы сельсина характеризуются ограниченным уровнем скорости, по условиям допустимой скоростной погрешности.
Схема датчика рассогласования на сельсинах
Ротор СД соединен с командным штурвалом, а ротор СП с исполнительным валом системы. Одна из роторных однофазных обмоток сельсинов получает питание и выполняет функцию обмотки возбуждения, другая является управляющей обмоткой, в которой индуктируется выходное ЭДС Евых т. Таким образом, сельсины работают в амплитудном режиме. Входная величина – угол поворота, выходная – ЭДС СП. Поток обмотки возбуждения индуктирует ЭДС в трехфазной обмотке статора СД, а т.к. статорная цепь замкнута, то течет ток. Фазные ЭДС обмотки статора СП определяются как падения напряжения на реактивных сопротивлениях этой обмотки. Если пренебречь током нагрузки выс. обмотки СП, ЭДС вращения индуктивным сопротивлением рассеивания ОВ, активным сопротивлением ОВ СП. Тогда амплитудные значения фазных ЭДС СП будут определяться как
Где Хм – сопротивление взаимной индукции между статорной и роторной обмотки
хs – индуктивное сопротивление рассеивания синхронизирующей обмотки одной фазы R – фазное активное сопротивление синхронизирующей обмотки сельсина. К – коэффициент пропорциональности (трансформации между обмотками статора и ротора) для фаз В и С
Эти ЭДС трансформируются в обмотку ротора СП, давая соответствующие составляющие выходные ЭДС датчика рассогласования
Аналогично для фаз А и В.
Если засогласовать положение роторных обмоток СД и СП, принять их перпендикулярное положение (у СД по оси А, а у СП перпендикулярно оси А). То рассогласование системы
Значение ЭДС принимает синусоидальный характер – генераторный режим. Роторная обмотка СП включена на усилитель, выход усилителя на нагрузку СКВТ
В системах, где нужно точное измерение угловой координаты вместо сельсинов берут СКВТ. СКВТ – это двухфазная микромашина переменного тока на явно полюсные статор и ротор имеют по две взаимно перпендикулярные обмотки, на статоре обмотка ОВ и квадратурная на роторе синусная и косинусная обмотки.
С1 С2 – ОВ С3 С4 – квадратурные обмотки Р1 Р2 – косинусная Р3 Р4 – синусная В амплитудном режиме ОВ расположенное на статоре по оси α получает питание от источника переменного тока U=Um*sin(ωt) Начальная фаза равна 0.
В разомкнутых обмотка ротора наводится ЭДС, амплитуды которых оказываются функциями угла поворота ротора. Для косинусной обмотки по оси α (Р1 Р2) Edm=kT *Um cos θ= Em cos θ В синусной обмотке по оси q (Р3 Р4) Eqm=kT *Um sin θ= Em sin θ Um – напряжение возбуждения kT – коэффициент трансформации между обмоткой ОВ и каждой роторной обмотки при их косом расположении. Если роторные обмотки включены на нагрузку, то характеристика управления искажается (Eqm и Eα m, тоесть неравномерная нагрузка). Для устранения этого нужно произвести симметрирование нагрузки. Бывает первичное и вторичное: Если мы выравниваем сопротивление по оси α и q, но такое симметрирование 0 вторичным.
В основном принимается вторичное симметрирование. Первичное только когда не возможно вторичное. Исполнительные элементы
Исполнительные элементы в системах автоматики осуществляют перемещение рабочего органа в соответствии с управляющим сигналом, поступающего от чувствительного или управляющего элемента.
Рабочие органы: дроссельные заслонки, клапаны, задвижки, ползунки потенциометров, т.е. все то, что способно изменять количество энергии или количество вещества, поступающего в объект управления. Схема фазового управления исполнительным двигателем:
За коэффициент сигнала принимается sin φ. Если sin φ=0, то поле, пульсирующее ротор неподвижно. Если sin φ>0, или меньше 1, то вращающее электрическое магнитное поле электрическое ω>0, но меньше ωмах .
Амплитудо-фазовое управление
С – фазодвижущий конденсатор Uc =-j*i*b*xc
Напряжение на обмотке возбуждения и фазовый сдвиг на 900.
Статическими характеристиками таких исполнительных двигателей являются в относительных единицах механическая характеристика.
n=f(m) n=w/wн m=M/Mн
И регулировочная характеристика
n = f(Купр) n=f(a) Купр – коэффициент управления зависящий от угла
Шаговые двигатели Преобразовать управляющую последовательность импульсов в угол поворота вала исполнительного двигателя каждому импульсу управления соответствует дискретное перемещение вала – шаг. Величина шага зависит от конструкции двигателя и схемы коммутации (соединения) его обмоток. На практике применяются двигатели с шагом 1-1800. Для уменьшения шага увеличивают число пар полюсов. Частота вращения ротора и суммарный угол поворота определяются частотой следования импульсов управления и их количества. Шаговые электродвигатели делятся на 2 группы: 1. Имеют кинематическую связь ротора со статором. 2. Электромагнитная связь ротора со статором. Первая группа имеет максимальное быстродействие до 50 шагов в секунду и в САУ не применяется.
|
||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-09-18; просмотров: 721; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.141.32.186 (0.008 с.) |








 КтUВт – коэффициент передачи в амплитудном режиме.
КтUВт – коэффициент передачи в амплитудном режиме.
 - для фазы А
- для фазы А - расчетное кажущееся сопротивление одной фазы синхронизирующей обмотки СД и СП
- расчетное кажущееся сопротивление одной фазы синхронизирующей обмотки СД и СП

 - фаза А
- фаза А









