Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Двухфазный магнитоэлектрический шаговый двигательСодержание книги
Поиск на нашем сайте
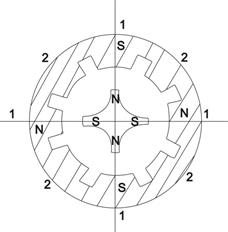
Ротор звездочка из постоянных магнитов с числом полюсов равным половине числа полюсов статора. На статоре расположены обмотки двух фаз. Число полюсов статора должно быть кратно 4. Обмотки статора являются обмотками управления, состоят из катушек, охватывающей один полюс статора. Катушки соединены последовательно-встречно, через одну.
Между собой обмотки управления смещены на одно зубцовое деление.
Основные режимы работы шагового двигателя: 1. Статический 2. Режим пуска 3. Установившийся режим 4. Переходный
Статический режим - это действие синхронизирующего момента на ротор.
Пассивные шаговые двигатели – возбуждение от постоянного магнита. Активные шаговые двигатели – возбуждение от электромагнита.
Пассивные шаговые двигатели делятся на реактивные и индукторные. Реактивные: Статор и ротор из листов магнитной мягкой электротехнической стали на статоре, явно выражены полюса. На роторе одинаковых размеров зубцы. В пазах статора обмотка управления переменного тока. А на роторе только метал. Для реверса поменять порядок следования фаз.
Индукторные: На роторе и статоре источник магнитного поля постоянного магнита. Количество зубцов статора и ротора одинаковы, но они смещены относительно друг другу. Скорость зависит от частоты управляющих импульсов. Есть ДПТ бесколекторные, обмотки на статоре и постоянные магниты на роторе.
Электромагнитные элементы.
Электрический магнит – устройство, создающее в некоторой части пространства магнитное поле при протекании по его обмотке электрического тока. В электромагните происходит преобразование электрической мощности в механическую. Электромагнитное реле – совокупность электрического магнита и перемещающейся части (контакты, золотниковые устройства, клапаны, задвижки). Перемещение осуществляется за счет взаимного магнитного поля или пружин. Электромагнитное реле (контактор) – это устройство дискретного действия, у которого полное изменение входной величины соответствующим двум установившимся значениям выходной величины. В зависимости от создания магнитного поля различают следующие виды реле: 1. Нейтральное реле постоянного тока
2. Поляризованное реле постоянного тока 3. Реле переменного тока По характеру перемещения подвижной части различают: 1. Реле с угловым перемещением якоря (поворотные) 2. С линейным перемещением реле классифицируются также: ü по форме магнитной цепи ü по количеству обмоток ü по характеру расположения обмоток (подвижные и неподвижные) ü по характеру действия тяговых усилий, создаваемых обмоткой (система прямого и дифференциального действия)
Нейтральное реле постоянного тока
Нейтральное реле постоянного тока состоит: 1. подвижная часть магнитопровода – якорь 2. воздушный зазор 3. неподвижная часть – полюс(ограничивает воздушный зазор между якорем и полюсом) 4. обмотка 5. неподвижный магнитопровод – ярмо 6. сердечник
ТЯГОВЫЕ И МЕХАНИЧЕСКИЕ ХАРАКТАРИСТИКИ РЕЛЕ
При подаче тока на катушку возникает электромагнитная сила, под действием которой якорь притягивается, преодолевая механические силы, притягивающие к сердечнику. Зависимость электромагнитной силы от величины рабочего воздушного зазора называется тяговой характеристикой. Зависимость противодействующих сил приведенных к точке приложения электромагнитных сил от воздушного зазора называется механической характеристикой реле.
U=I*R-E=I*R+dj/dt – уравнение электрического равновесия.
Если умножить уравнение на idt, то получим уравнение энергетического баланса.
U*idt=i2*R*dt+idj
Левая часть – определяет полученную электрическую энергию, потребляемую от сети за время dt. i2*R*dt – потери на тепло (на активном сопротивлении). idj - часть электрической энергии, преобразовавшейся а энергию магнитного поля за время dt. Электромагнитное поле распределяется по всему объему реле. Энергия магнитного поля в основном поддерживается в воздушном зазоре т.к. магнитопровод не насыщен. Когда якорь начинает двигаться, потокосцепление изменяется от минимального значения до максимального, таким образом при движении якоря электрическая энергия якоря преобразуется в электромагнитное поле, часть которого преобразуется в механическую энергию. Для того чтобы подсчитать механическую электродвижущую силу якоря нужно принять допущения:
1. Кривые намагничивания имеют прямой характер. 2. Поток рассеивания незначителен (поток в воздушном зазоре).
Параметры реле
1. Ток срабатывания – минимальный ток в обмотке реле, при котором реле срабатывает, т.е. электромагнитная сила превосходит механическую силу. 2. Рабочий ток – величина тока в обмотке, при которой обеспечивается надежное замыкание контактов. Ip > Iсраб 3. Ток отпускания – максимальное значение тока, при котором электромагнитная сила меньше механической. 4. Коэффициент запаса по срабатыванию. K= Ip / Iсраб 5. Коэффициент запаса по отпусканию. K= Ip / Iотп 6. Коэффициент возврата K= Iотп / Iсраб < 1 7. Коэффициент усиления K=Рконт / Робм 8. Время срабатывания и время отпускания.
Способы изменения временных параметров реле.
1. Конструктивный 2. Схемный Конструктивный. Для ускорения процесса срабатывания и отпускания: 1) Ослабить влияние вихревых токов в магнитопроводе (сталь с высоким удельным сопротивлением, как статор 2) Уменьшают по возможности массу якоря и его рабочий ход.
Для замедления процесса срабатывания и отпускания используют электромагнитное демпфирование. При срабатывании или отпускании основной магнитный поток, создаваемый обмоткой изменяется. При этом в короткозамкнутом (медной шайбе) возникает взаимоиндукция и течет ток, обратный магнитному потоку, направленный встречно основному, т.е. общий результат магнитного потока уменьшается, это эффективно при замедлении отпускания.
Схемные способы Для замедления срабатывания нужно увеличить постоянную времени реле или уменьшить установившееся значение тока в обмотке. Для ускорения срабатывания нужно наоборот уменьшить постоянную времени и уменьшить ток. t = L / R = R*C – постоянная времени
Для ускорения процесса последовательно с обмоткой включается сопротивление (нужно увеличить напряжение). Недостатки: потери. Параллельно дополнительному сопротивлению включают конденсатор.
Для замедления процесса увеличивают индуктивность (число витков катушки), напряжение при этом постоянно. Последовательно обмотке (встречно) включают диод или отключают полученную демпферную обмотку.
|
||||||
|
|
Последнее изменение этой страницы: 2016-09-18; просмотров: 353; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.144.29.103 (0.01 с.) |