Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Определение числа степеней свободы в рамах и фермах.Содержание книги
Похожие статьи вашей тематики
Поиск на нашем сайте
Определение числа степеней свободы в рамах и фермах.
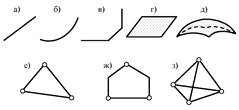
Диск-любая неизменяемая система.
Шарнир отнимает у системы 2 степени свободы.
Шарнир отнимает у диска 2 степени свободы.
Стержень отнимает одну степень свободы.
Если соед-ся шарнирно в узле n дисков, то получается (n-1) простой шарнир.
Пусть имеется С0 опорных стержней.(заделка эквивалентна 3-м опорным стержням).
-Препятствует углу поворота.
Если 3 диска, то W=3D Каждый шарнир отнимает 2 ст.св.,след-о «-2Ш» Каждый опорный стержень отнимает 1 ст.св., слеж-о «-С0» W =3Д-2Ш-С0 -универсальная формула Чебушева для определения ст.св. любой плоской сист.(ДЛЯ РАМ!) У-число узлов С-число стержней С0-число опорных стержней W =3Д+2У-2Ш-С0 -только для шарнирно-стержневых сист,тк как нет жестких узлов(ДЛЯ ФЕРМ!)
-упадет.
-треугольная неизменяемая система.
Изменяемая Неизменяемая 3) 2 диска можно соединить неизменяемо с помощью 3-х стержней, не параллельных и не пересекающихся в данной точке.
5) Шарнир-точка пересечения стержней. 3 диска можно соед попарно 3-мя парами стержней, каждая из которых создает фиктивные шарниры, не лежащие на одной прямой.
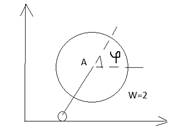
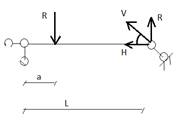
Понятие о мгновенно изменяемых системах, способы проверки на мгновенную изменяемость. Мгновенно изменяемой системой наз. Система, если она допускает бесконечно малые перемещения без деформации элементов, после чего она становится неизменяемой.
ΣMa=P*a-V*sin(a)*L=0 Lim V(при альфа стремится к нулю)=P*a/0 «стремится» к бесконечности.
В мгновенно изменяемых системах возникают бесконечно большие или неопределенные усилия, поэтому проектирование таких конструкций невозможно.
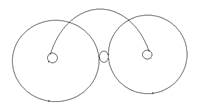
1) 2) Соед-е 2-х дисков 3-мя параллельными стержнями разной длины.
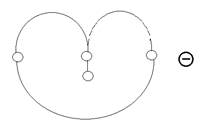
3) Соед 2-х дисков 3-мя стержнями, оси которых пересекаются в одной точке. 4) Соед 3-х дисков с помощью 3-х шарниров, лежащих на одной прямой.
Кинематический анализ 3х шарнирных рам и арок (с затяжкой и без), многопролетных балок и рам, понятие и поэтажных схемах. Кинематический анализ сооружений начинается с определения числа степеней свободы. W= 2D-2Ш-С0 Формула Чебушева для любой плоск системы ,гдеD- число дисков Ш- число простых шарниров (соед. Только 2 диска), если шарнир соед. N дисков, о такой шарнир называется кратным и он равносилен n-1 простому шарниру С0- количество опорных стержней(Заделка эквивалентна 3м опорным стержням. Если система шарнирно-стержневая, то W=2У-С-С0 ,где С0- число опорных стержней С-число стержней У -число узлов. Система называется мгновенно изменяемой, если допускает б.м. перемещения без деформации элементов, после чего она становится неизменяемой. В мгновенно изменяемых системах возник б.б. или неопред. усилия, поэтому проектировать такие конструкции мы не можем. Признаки мгновенной изменяемости: 1)соединение 2х дисков с помощью шарнира и стержня, ось которого проходит через этот шарнир. 2)соединение 2х дисков 3мя параллельными стержнями разной длины 3)соединение 2х дисков 3мя стержнями, оси которых пересекаются в одной точке 4)Соединение 3х дисков с помощью 3х шарниров, лежащих на 1й прямой.
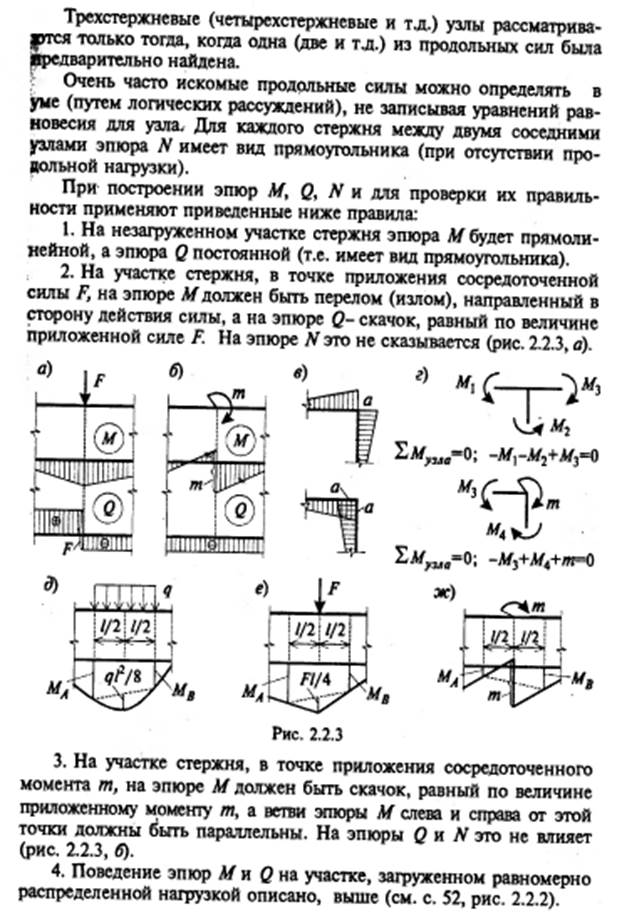
Принципы расчёта консольных и простых рам, определение опорных реакций, построение эпюр, проверка их правильности.
Построение эпюр
Проверка эпюр
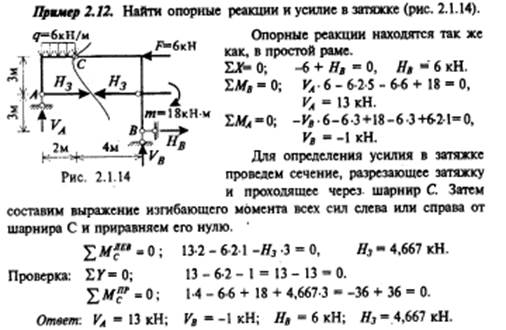
Особенности расчёта трёхшарнирных рам с затяжкой и без.
Суть: режем раму по шарниру справа и слева и находим реакции опор.
Трёхшарнирная рама без затяжки
Трёхшарнирная рама с затяжкой
Теорема Клайперона При статическом действии обобщенной силы на упругую систему действительная работа внешней силы определяется как половина произведения окончательного значения этой силй на окончательное значение соответствующего обобщенного перемещения, вызванного этой силой и направленного по направлению действия силы.
где
Вопрос Обобщенный закон Гука Опыт показывает, что для большинства материалов при умеренных нагрузках связь между напряжениями и деформациями может быть принята линейной. Это обнаруживается при испытании стандартных образцов в условиях одноосного растяжения. Вплоть до значения напряжения
В законе Гука коэффициент пропорциональности
закон Гука для трехосного напряженного состояния. Обратим внимание на то, что с точностью до малых высшего порядка нормальные напряжения не вызывают сдвигов, а касательные напряжения не вызывают удлинений ребер элемента. Рассмотрим малый элемент. Пусть на элемент действует только напряжение
При
При
Деформация удлинения в направлении оси
Аналогичным образом определятся деформации в направлении других координатных осей. Подставляя выражения для
Добавим к этим уравнениям еще три соотношения, вытекающие из закона Гука при чистом сдвиге (двухосное напряженное состояние, при котором на гранях элемента возникают только касательные напряжения):
Три упругие постоянные (модуль упругости
Шесть полученных уравнений, связывающих между собой компоненты тензоров напряжений и деформаций, составляют так называемый обобщенный закон Гука.
Вопрос Вопрос Вопрос Рис.64
Так как направления возможных перемещений имеют направления скоростей, то перемещения точек звена АВ (рис.64, в) определяются с помощью мгновенного центра скоростей Так как Аналогично, поворотом на малый угол Работу сил, приложенных к материальной системе, на возможном перемещении будем называть возможной работой. Если рассмотреть различные типы материальных систем, можно обнаружить, что элементарная работа реакций многих связей на возможном перемещении окажется равной нулю. Такие связи, сумма возможных работ реакций которых на любом возможном перемещении равна нулю, называются идеальными связями. К таким связям относятся, например, все связи без трения. Связи, которые не изменяются со временем, называются стационарными. Есть связи, которые называют или удерживающими, или односторонними, в зависимости от того препятствуют они перемещению точки во взаимно противоположных направлениях или только в одном.
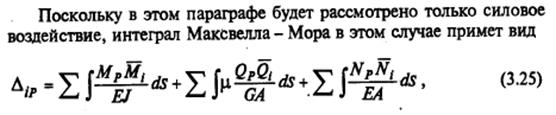
Формула мора
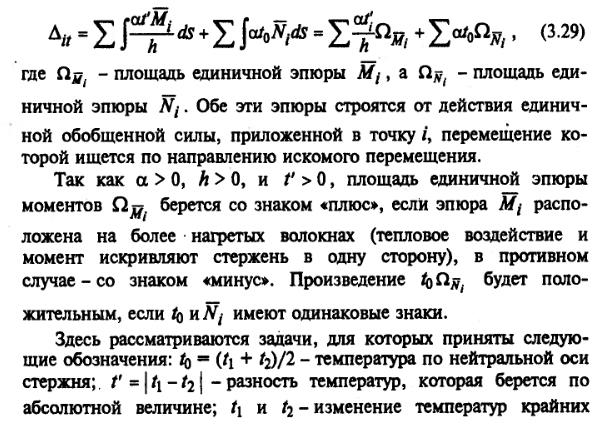
Температурное воздействие.
Осадка
Формула умножения трапеций.
Определение числа степеней свободы в рамах и фермах.
Диск-любая неизменяемая система.
Шарнир отнимает у системы 2 степени свободы.
Шарнир отнимает у диска 2 степени свободы.
Стержень отнимает одну степень свободы.
Если соед-ся шарнирно в узле n дисков, то получается (n-1) простой шарнир.
Пусть имеется С0 опорных стержней.(заделка эквивалентна 3-м опорным стержням).
-Препятствует углу поворота.
Если 3 диска, то W=3D Каждый шарнир отнимает 2 ст.св.,след-о «-2Ш» Каждый опорный стержень отнимает 1 ст.св., слеж-о «-С0» W =3Д-2Ш-С0 -универсальная формула Чебушева для определения ст.св. любой плоской сист.(ДЛЯ РАМ!) У-число узлов С-число стержней С0-число опорных стержней W =3Д+2У-2Ш-С0 -только для шарнирно-стержневых сист,тк как нет жестких узлов(ДЛЯ ФЕРМ!)
-упадет.
-треугольная неизменяемая система.
Изменяемая Неизменяемая 3) 2 диска можно соединить неизменяемо с помощью 3-х стержней, не параллельных и не пересекающихся в данной точке.
5) Шарнир-точка пересечения стержней. 3 диска можно соед попарно 3-мя парами стержней, каждая из которых создает фиктивные шарниры, не лежащие на одной прямой.
|
||||
|
|
Последнее изменение этой страницы: 2016-08-26; просмотров: 2896; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.15.225.188 (0.009 с.) |

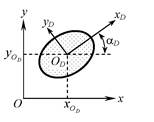 В плоскости диск обладает тремя степенями свободы – это координаты X,Y и угол ά (альфа).
В плоскости диск обладает тремя степенями свободы – это координаты X,Y и угол ά (альфа).
 Простой шарнир соединяет 2 диска.
Простой шарнир соединяет 2 диска.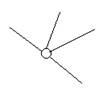 Если в шарнир соед-ся n дисков, то он наз. Кратным и равносилен (n-1) шарниру.
Если в шарнир соед-ся n дисков, то он наз. Кратным и равносилен (n-1) шарниру.

 3.Способы образования геометрически неизменяемых систем.
3.Способы образования геометрически неизменяемых систем.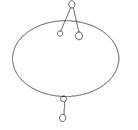 1)Диада 2-х стержневых систем. Присоединение диады, то есть 2-х стержневого звена не меняет геом изменяемости/неизм-ти сист.
1)Диада 2-х стержневых систем. Присоединение диады, то есть 2-х стержневого звена не меняет геом изменяемости/неизм-ти сист.
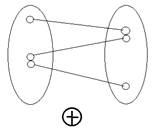
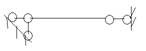
 2) 2 диска можно соединить неизменяемо шарниром и стержнем, ось которого не проходит через этот шарнир.
2) 2 диска можно соединить неизменяемо шарниром и стержнем, ось которого не проходит через этот шарнир.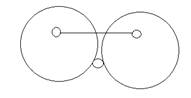
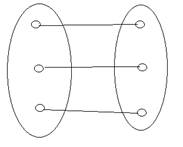

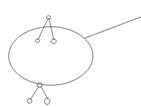
 4) 3 диска можно соед неизм-о с помощью 3-х шарниров, не лежащих на одной прямой.
4) 3 диска можно соед неизм-о с помощью 3-х шарниров, не лежащих на одной прямой.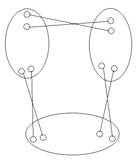
 R=V*sin(альфа)
R=V*sin(альфа) Принципы мгновенной изменяемости:
Принципы мгновенной изменяемости: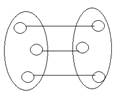 Соединение 2-х дисков с помощью шарнира и стержня, ось которого проходит через этот шарнир.
Соединение 2-х дисков с помощью шарнира и стержня, ось которого проходит через этот шарнир.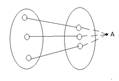





 - полное перемещение точки приложения силы
- полное перемещение точки приложения силы  по ее направлению от действия всех n сил.
по ее направлению от действия всех n сил. называемого пределом пропорциональности,справедлив закон Р. Гука (1676 г.): напряжения прямо пропорциональны деформации удлинения:
называемого пределом пропорциональности,справедлив закон Р. Гука (1676 г.): напряжения прямо пропорциональны деформации удлинения: (2.9)
(2.9) называется модулем упругости. Он характеризует жесткость. Закон Гука можно записать в виде
называется модулем упругости. Он характеризует жесткость. Закон Гука можно записать в виде
 а
а  тогда деформации в направлении координатных осей будут равны:
тогда деформации в направлении координатных осей будут равны:
 и
и 

 и
и 

 при совместном действии всех напряжений будет равна
при совместном действии всех напряжений будет равна
 после очевидных преобразований получим три уравнения:
после очевидных преобразований получим три уравнения: (2.10)
(2.10)

 (2.11)
(2.11) модуль сдвига
модуль сдвига  и коэффициент Пуассона
и коэффициент Пуассона  ) не являются независимыми. Они связаны между собой соотношением
) не являются независимыми. Они связаны между собой соотношением (2.12)
(2.12) этого звена. А возможное перемещение всего тела при плоскопараллельном движении – есть поворот на малый угол
этого звена. А возможное перемещение всего тела при плоскопараллельном движении – есть поворот на малый угол  вокруг оси, проходящей через мгновенный центр скоростей. Этот угол можно определить.
вокруг оси, проходящей через мгновенный центр скоростей. Этот угол можно определить. , то
, то  а перемещение ползуна В:
а перемещение ползуна В:  и точки С:
и точки С:  . То есть перемещения всех точек механизма можно определить через одно возможное перемещение, перемещение звена ОА, через угол
. То есть перемещения всех точек механизма можно определить через одно возможное перемещение, перемещение звена ОА, через угол  .
.