Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Сканування відбитків пальцівСодержание книги
Поиск на нашем сайте
Одержання електронного зображення відбитків пальців з добре помітним папілярним візерунком — досить складне завдання. Оскільки відбиток пальця занадто малий, для одержання його якісного зображення доводиться використовувати досить витончені методи. Всі існуючі сканери відбитків пальців за фізичними принципами, які вони використовують, можна розділити на три групи: – оптичні; – напівпровідникові; – ультразвукові. Розглянемо кожну з них, вкажемо на їх переваги й недоліки, а також провідних виробників (іноді єдиних), що займаються реалізацією кожного з методів. Оптичні сканери – засновані на використанні оптичних методів одержання зображення. У наш час існують такі технології реалізації оптичних сканерів: 1. FTIR-сканери – є пристроями, у яких використовується ефект порушеного повного внутрішнього відбиття (Frustrated Total Internal Reflection, FTIR) (рис. 3.20). При попаданні світла на межу двох середовищ світлова енергія поділяється на дві частини: одна відображається від межі, інша — проникає через межу в інше середовище. Частина відбитої енергії залежить від кута падіння. Починаючи з деякої його величини, вся світлова енергія відображається від межі. Це явище називається повним внутрішнім відбиттям. Однак при контакті щільнішого оптичного середовища (у нашому випадку поверхня пальця) з менш щільним (у практичній реалізації, як правило, поверхня призми) у місці повного внутрішнього відбиття пучок світла проходить через цю межу. Таким чином, від границі відіб'ються тільки пучки світла, що потрапили в такі місця повного внутрішнього відбиття, до яких не були прикладені борозенки папілярного рисунка поверхні пальця. Для фіксації світлової картинки поверхні пальця, яка одержана в такий спосіб, використовується спеціальна камера (ПЗП або КМОП залежно від реалізації сканера).
Рисунок 3.20 – Принцип роботи FTIR-сканерів
Провідні виробники сканерів даного типу: BioLink, Digital Persona, Identix. 2. Оптоволоконні сканери (fiber optic scanners) — є оптоволоконною матрицею, кожне з волокон якої закінчується фотоелементом (рис. 3.21). Чутливість кожного фотоелемента дозволяє фіксувати залишкове світло, що проходить через палець, у місці дотику рельєфу пальця до поверхні сканера. Зображення відбитка пальця формується за даними кожного з елементів.
Рисунок 3.21 – Принцип роботи оптоволоконних сканерів
Провідний виробник сканерів даного типу Delsy. 3. Електрооптичні сканери (electro-optical scanners) — в основі даної технології лежить використання спеціального електрооптичного полімеру, до складу якого входить світловипромінюючий прошарок. Під час прикладання пальця до сканера неоднорідність електричного поля біля його поверхні (різниця потенціалів між горбками й западинами) відображається на світінні цього прошарку так, що він висвітлює відбиток пальця. Потім масив фотодіодів сканера перетворить це світіння в цифровий вигляд. Провідний виробник сканерів даного типу Security First Corp (Ethentica). 4. Оптичні протяжні сканери (sweep optical scanners) (рис. 3.22) – у цілому аналогічні FTIR–пристроям. Їх особливість у тому, що палець потрібно не просто прикладати до сканера, а проводити ним по вузькій смужці – зчитувачу. Під час руху пальця по поверхні сканера робиться серія миттєвих знімків (кадрів). При цьому сусідні кадри знімаються з деяким накладенням, тобто перекривають один одного, що дозволяє значно зменшити розміри призми, що використовується, й самого сканера. Для формування (точніше складання) зображення відбитка пальця під час його руху по поверхні, що сканує, використовується спеціалізоване програмне забезпечення.
Рисунок 3.22– Практична реалізація оптичного протяжного сканера
Провідний виробник сканерів даного типу Kinetic Sciences. 5. Роликові сканери (roller–style scanners) – у цих мініатюрних пристроях сканування пальця відбувається при прокручуванні пальцем прозорого тонкостінного обертового циліндра (ролика) (рис. 3.23). Під час руху пальця по поверхні ролика робиться серія миттєвих знімків (кадрів) фрагмента папілярного рисунка, що стикається з поверхнею. Аналогічно протяжному сканеру, сусідні кадри знімаються з накладенням, що дозволяє без перекручувань зібрати повне зображення відбитка пальця. При скануванні використовується найпростіша оптична технологія: всередині прозорого циліндричного ролика перебувають статичне джерело світла, лінза й мініатюрна камера. Зображення освітлюваної ділянки пальця фокусується лінзою на чутливий елемент камери. Після повного «прокручування» пальця «збирається картинка» його відбитка.
Рисунок 3.23 – Схема роликового сканера (ліворуч) та його реалізація (праворуч)
Провідні виробники сканерів даного типу: Digital Persona, CASIO Computer, ALPS Electric. 6. Безконтактні сканери (touchless scanners) – у них не потрібен безпосередній контакт пальця з поверхнею пристрою, що сканує (рис. 3.24). Палець прикладається до отвору в сканері, кілька джерел світла підсвічують його знизу з різних сторін, у центрі сканера перебуває лінза, через яку зібрана інформація проектується на КМОП-камеру, що перетворить отримані дані в зображення відбитка пальця.
Рисунок 3.24 – Узагальнена схема роботи безконтактного сканера
Провідний виробник сканерів даного типу Touchless Sensor Technology. Відзначимо декілька недоліків оптичних сканерів і вкажемо, які з них вже виправлені: – неможливість зробити їх компактними, однак, як це видно з наведених вище чотирьох з шести рисунків, у наш час це можливо; – оптичні модулі досить дорогі через велику кількість компонентів і складної оптичної системи. І ця проблема на сьогодні вирішена: ціна оптичних сенсорів деяких виробників сьогодні 10 – 15 дол. (не плутати з ціною сенсора в корпусі для кінцевого користувача в комплекті з ПЗ); – оптичні сканери нестійкі до муляжів і пальців неживої людини. Однак варто відзначити, що практично всі виробники реалізували механізми захисту від муляжів на тому або іншому етапі обробки зображення, що сканується. Напівпровідникові сканери – у їх основі лежить використання для одержання зображення поверхні пальця властивостей напівпровідників, що змінюються в місцях контакту гребенів папілярного візерунка з поверхнею сканера. Сьогодні існує кілька технологій реалізації напівпровідникових сканерів. 1. Ємнісні сканери (capacitive scanners) — найширше розповсюджений тип напівпровідникових сканерів, у яких для одержання зображення відбитка пальця використовується ефект зміни ємності pn-переходу напівпровідникового приладу при зіткненні гребеня папілярного рисунка з елементом напівпровідникової матриці. Існують модифікації описаного сканера, у яких кожний напівпровідниковий елемент у матриці сканера виступає в ролі однієї пластини конденсатора, а палець – у ролі іншої. При прикладанні пальця до сенсора між кожним чутливим елементом і виступом–западиною папілярного рисунка утвориться якась ємність, величина якої визначається відстанню між поверхнею пальця й елементом. Матриця цих ємностей перетвориться в зображення відбитка пальця. Провідні виробники сканерів даного типу Infineon, ST-Microelectronics, Veridicom. 2. Чутливі до тиску сканери (pressure scanners) — у цих пристроях використовуються сенсори, що складаються з матриці п’єзоелементів. При прикладанні пальця до поверхні, що сканує, виступи папілярного рисунка натискають на деяку підмножину елементів поверхні, відповідно западини не тиснуть. Матриця отриманих з п’єзоелементів напруг перетвориться в зображення поверхні пальця. Провідний виробник сканерів даного типу: BMF. 3. Термосканери (thermal scanners) — у них використовуються сенсори, які складаються з піроелектричних елементів, що дозволяють фіксувати різницю температури й перетворювати її в напругу (цей ефект також використовується в інфрачервоних камерах). При прикладанні пальця до сенсора за температурою виступів, що доторкаються до піроелектричних елементів папілярного рисунка й температурою повітря, що перебуває в западинах, будується температурна карта поверхні пальця й перетворюється в цифрове зображення.
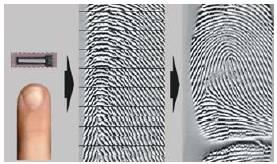
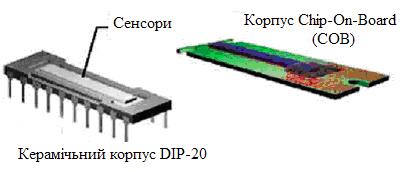
Фірма Atmel Grenoble випустила на ринок нову мікросхему зчитування відбитків пальців FDC4A14. Принцип її дії заснований на визначенні рисунка температур. Для роботи мікросхеми не потрібно ні джерела світла, ні призми, ні відеосистеми. FDC4A14 має правильну лінійну форму, що дозволяє легко вбудовувати цю схему у різні мініатюрні системи, що зчитують. Мікросхема випускається у двох типах корпусів DIP і COB – Chip–on–Board Package (рис. 3.25).
Рисунок 3.25 – Мікросхема зчитування відбитків пальців FDC4A14
FDC4A14 має малий розмір поверхні, що зчитує – 0,4x14 мм, це пояснює досить низьку ціну мікросхеми. Вартість її від 10–30 доларів, залежно від кількості виробів, що поставляються. Зчитування рисунка відбувається під час руху пальця по поверхні сенсора. Максимальна швидкість руху пальця не повинна перевищувати 53,4 см/с (~2 км/год). Роздільна здатність схеми – 500 dpi. FDC4A14 одержує деяке число зображень у секунду, що задається програмно, аналого-цифровий перетворювач посилає цифровий кадр, адаптований для EPP – паралельного порту, USB-контролера або безпосередньо мікропроцесора. Не потрібно ні схем захоплення кадрів, ні схем логічного з`єднання. Це робить FDC4A14 таким, що легко вбудовується в будь-які системи ідентифікації і верифікації. Функціональна схема FDC4A14 показана на рис. 3.26. Схема розділена на дві частини: сенсор і перетворювач даних. Стовпці сенсорних датчиків об'єднані в масиви розмірністю 280+1, де кожний елемент посилає електричний сигнал на один з двох підсилювачів (по одному на лінійку), одночасно проводиться вибірка за двома лініями (парній і непарній), далі сигнал надходить в АЦП і регістр, виходи якого виведені на зовнішні висновки. Таким чином за один такт можна прочитати 2 точки.
Рисунок 3.26 – Функціональна схема FDC4A14
Після включення живлення схеми подається сигнал Reset. Для усталенішої роботи його можна подавати перед кожним зчитуванням кадру, однак це не є необхідною умовою. Початкова послідовність операцій може бути такою (рис. 3.27): –установка на висновку RST стану високого рівня; – установка RST у стан низького рівня; – посилка 4-тактових імпульсів (пов'язане з конвеєризацією); – посилка імпульсів для пропуску першого кадру, тому що він ніколи не буває коректним.
Рисунок 3.27 – Початкова послідовність операцій
Кадр складається з 280 дійсних + 1 фіктивної точок. Оскільки дві точки виводяться одночасно, система має посилати 281x4 = 1124 імпульси для читання одного кадру. Reset у цей час необхідно установити у стан логічного нуля. Вхідні імпульси зчитуються під час спаду, дані надходять на вихід під час переднього фронту. Після стартової послідовності на кожному імпульсі на виходах Do 0–3, De 0–3 з'являється новий байт зображення. Він містить дві точки: 4 біти на Do 0–3 (непарний піксель) і 4 біти на De 0–3 (парний піксель). Для висновку даних необхідно встановити вхід OE у стан низького рівня. Коли на OE "1", виходи Do 0–3, De 0–3 перебувають у стані високого імпедансу, що дозволяє підключати мікросхему безпосередньо на шину мікропроцесора без використання зовнішньої логіки, підключаючи OE через селектор-адресу. FDC4A14 лише передає дані, тобто процесор має працювати з даною схемою тільки в режимі читання, тому що немає необхідності в будь-яких керуючих командах. У схемі також передбачені відеовиходи AVE і AVO. Їх особливістю є те, що відеодані, внаслідок конвеєризації, з'являються на виході на один такт раніше цифрових. Першим пікселем послідовності є піксель, розташований у лівому верхньому куті сенсорної матриці. Для кожного стовпця з 8 точок: 1–1–, 3–, 5–5–, 7–я виводяться через непарні виходи даних, висновки Do 0–3; 2–, 4–4–, 6–, 8–я – через парні виходи, висновки De 0–3; при цьому старшим розрядом є біт 3, молодшим – 0. Фіктивний піксель у рядку необхідний для синхронізації початку рядка. У двох парних рядках (байти 1, 2 або DB1, DB2) пікселі завжди мають нульове значення, у двох непарних – 0х. У реальному зображенні такого бути не може, а оскільки дана послідовність присутня в кожному кадрі, вона є ознакою розпізнавання межі рядка. Кожний піксель є температурним датчиком, що визначає різницю температур поверхні мікросхеми й пальця. У найкращому випадку, температура пальця значно відрізняється від температури поверхні сенсора, у гіршому – вони приблизно рівні. Для одержання контрастного зображення необхідна мінімальна різниця температур – 1°С. Критичне значення температури перебуває в районі 33°С (± 5°С через розходження температури пальців), у цьому діапазоні температура поверхні сенсора може збігтися з температурою поверхні, що ідентифікується. FDC4A14 містить схему стабілізації температури для забезпечення необхідної якості зображення. Можливо кілька стратегій стабілізації температури, що залежить від зовнішніх умов: – у першу чергу зчитуємо температуру. Якщо вона перебуває поза критичним діапазоном (близько 33°), немає необхідності в температурній стабілізації; – якщо споживана потужність не є критичним ресурсом, а температура сенсора звичайно перебуває в критичній зоні, то можна стабілізувати температуру схеми свідомо вище температури пальця (>37°). Процес стабілізації може зайняти досить тривалий проміжок часу, приблизно хвилину або більше, залежно від навколишнього середовища, початкової температури схеми й конструктивних особливостей пристрою;
– якщо споживана потужність є критичним ресурсом, краще спочатку виконати пробне зчитування. Якщо після цього розпізнавання провести не вдається, і температура датчиків перебуватиме в критичній зоні, необхідно протягом декількох секунд провести температурну стабілізацію, після чого знову зробити зчитування й розпізнавання. Для керування температурним режимом в FDC4A14 передбачені такі можливості: – інформація про абсолютну температуру зчитувача перебуває у фіктивних байтах кадру 3 і 4 (DB3 і DB4); – температурна стабілізація здійснюється за допомогою входів TPP і TPE. Стабілізаційний зворотний зв'язок керується повністю зовні: зовнішній мікропроцесор або алгоритм визначає, потрібна температурна стабілізація чи ні. Ця особливість дає користувачу повний контроль над споживаною потужністю. TPP – вивід живлення нагрівача. До нього через зовнішній обмежувальний резистор підводять живлення. Резистор необхідний для обмеження струму з метою виключення перегріву, його значення залежить від напруги живлення, а також від конструктивних параметрів і параметрів зовнішнього середовища. TPE – цифровий вхід, встановлюється в "0", якщо буде необхідна температурна стабілізація. Після досягнення сенсором робочої температури необхідно зняти керуючий сигнал з цього входу (перевести в "1"). Для зменшення споживаної енергії в схемі передбачений так званий режим "засипання". Для його активації необхідно виконати такі установки (рис. 3.28): – установити RST в "1", при цьому всі внутрішні аналогові частини схеми відключаються від ланцюгів живлення; – установити PCLK в "1" або "0" – відключаються цифрові схеми; – установити TPE в "0" або відключити TPP; – установити OE в "1", тому що струм може також протікати через вихідні еле
Рисунок 3.28 – Установки для активації режиму «засипання»
На рис. 3.29 показаний приклад підключення мікросхеми до порту принтера комп'ютера та USB- контролера
Рисунок 3.29 – Приклад підключення мікросхеми до порту принтера комп'ютера та USB- контролера
При підключенні до порту принтера, останній необхідно сумістити зі стандартом EPP для організації високої швидкості передачі даних. Стандартний двонаправлений порт принтера комп'ютера здатний приймати близько 200 Кбайт даних у секунду (залежить від конкретного комп'ютера) – це в три рази менше, ніж в EPP. FDC4A14 може підключатися прямо до порту без зовнішньої з`єднувальної логіки. До джерела живлення схему можна підключити, наприклад, через порт PS/2 (паралельний порт не містить виводів живлення). Програма, що виконує збір даних з пристрою, повинна мати найвищий пріоритет, оскільки якщо під час збору даних відбудеться, наприклад, зчитування даних з вінчестера, збір даних перерветься, і частина кадрів загубиться. Також FDC4A14 можна легко підключити до USB-контролера, що виконує функції обслуговування USB-протоколу. Схема підключення повністю ідентична у випадках застосування мікропроцесорів, мікроконтролерів і DSP. USB-Контролер під керуванням вбудованих програм посилає дані з шини даних безпосередньо в USB-кабель, а з боку PC за допомогою драйвера здійснюється прийом даних. Обмін даними має відбуватися з постійним і достатнім трафіком для забезпечення рівномірності зчитування й відсутності пропуску кадрів. Як указувалося вище, FCD4A14 простий у використанні, не вимагає додаткової сполучної логіки для підключення до стандартних інтерфейсів. При цьому ціна на дану мікросхему достатня низька, що в результаті забезпечує малу вартість кінцевого пристрою. Все це розширює діапазон її використання в найнадійніших системах ідентифікації. Провідний виробник сканерів даного типу Atmel. Підсумовуючи, зазначимо, що у всіх наведених напівпровідникових сканерах використовуються матриця чутливих мікроелементів (тип яких визначається способом реалізації) і перетворювач їх сигналів у цифрову форму. Отже, узагальнено схему роботи наведених напівпровідникових сканерів можна продемонструвати в такий спосіб (рис. 3.30).
Рисунок 3.30 – Узагальнена схема роботи напівпровідникових сканерів
Вище були описані найпоширеніші («класичні») типи напівпровідникових сканерів, далі ми розглянемо інші, менш розповсюджені типи. 4. Радіочастотні сканери (RF–Field scanners) — у таких сканерах використовується матриця елементів, кожний з яких працює як маленька антена. Сенсор генерує слабкий радіосигнал і направляє його на поверхню пальця, яка сканується, кожний з чутливих елементів приймає відбитий від папілярного візерунка сигнал. Величина наведеної в кожній мікроантені ЕДС залежить від наявності або відсутності поблизу її гребеня папілярного візерунка. Отримана в такий спосіб матриця напруг перетвориться в цифрове зображення відбитка пальця. Провідний виробник сканерів даного типу Authentec. 5. Протяжні термосканери (thermal sweep scanners) — різновид термосканерів, у яких використовується, як і в оптичних протяжних сканерах, проведення пальцем по поверхні сканера, а не просте прикладання (рис. 3.31).
Рисунок 3.31 – Формування зображення при скануванні протяжним термосканером
Провідний виробник сканерів даного типу фірма Atmel. 6. Ємнісні протяжні сканери (capacitive sweep scanners) — використовують аналогічний спосіб покадрового складання зображення відбитка пальця, але кожний кадр зображення виходить за допомогою ємнісного напівпровідникового сенсора. Провідний виробник сканерів даного типу фірма Fujitsu. 7. Радіочастотні протяжні сканери (RF–Field sweep scanners)— аналогічні ємнісним, але використовують радіочастотну технологію. Виготовляє сканери даного типу фірма Authentec. Відзначимо основні недоліки напівпровідникових сканерів, хоча вони характерні не для всіх описаних методів: – сканери, зокрема, чутливі до тиску, дають зображення низького розділення й маленького розміру; – необхідність прикладання пальця безпосередньо до напівпровідникової поверхні (тому що будь-який проміжний прошарок впливає на результати сканування) призводить до її швидкого зношування; – чутливість до сильних зовнішніх електричних полів, які можуть викликати електростатичні розряди, здатні вивести сенсор з ладу (відноситься в першу чергу до ємнісних сканерів); – більша залежність якості зображення від швидкості руху пальця по поверхні, що сканує, властива прокатним сканерам. Ультразвукові сканери — дана група в цей час представлена всього одним методом сканування, що так і називається. Ультразвукове сканування — це сканування пальця ультразвуковими хвилями й вимір відстані між джерелом хвиль і западинами та виступами на поверхні пальця по відбитій від них луні (рис. 3.32). Якість отриманого зображення в 10 разів краща, ніж отриманого будь-яким іншим, біометричним методом. Крім цього варто відзначити, що даний спосіб практично повністю захищений від муляжів, оскільки дозволяє крім відбитка пальця одержувати й деякі додаткові характеристики про його стан (наприклад, пульс всередині пальця).
Рисунок 3.32 – Схема роботи ультразвукового сканера
Провідний виробник сканерів даного типу фірма Ultra–Scan Corporation (UCS). Основні недоліки ультразвукових сканерів: – висока ціна в порівнянні з оптичними й напівпровідниковими сканерами; – великі розміри самого сканера. Але можна з упевненістю сказати, що ультразвукове сканування поєднує в собі кращі характеристики оптичної й напівпровідникової технологій.
|
||||||||||||
|
|
Последнее изменение этой страницы: 2016-08-26; просмотров: 795; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.227.46.87 (0.016 с.) |





 менти.
менти.