Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Импульсные регуляторы с исполнительными механизмамиСодержание книги Поиск на нашем сайте постоянной скорости
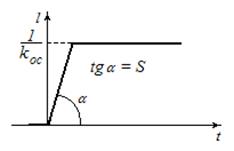
Релейные (позиционные) регуляторы имеют нелинейную характеристику. ИМ постоянной скорости (т.е. с постоянной скоростью вращения выходного вала S) в комплекте с его пусковым устройством имеет статическую характеристику следующего вида
где l – перемещение РО; Z – сигнал на входе пускового устройства; Δ нч – зона нечувствительности. Это обусловлено тем, что в качестве пусковых устройств, как правило, используются релейные электромагнитные аппараты (магнитные пускатели, электромагнитные реле и т.п.).
γ = Δtимп/Т, (1) где Т = Δtимп + Δtпауз – период следования им- пульсов; Δtимп – длительность импульсов; Δtпауз – длительность пауз. Во время поступления импульса ИМ будет перемещать РО с постоянной скоростью dl/dt=S=tgα. Во время пауз ИМ будет неподвижен. Тогда средняя скорость перемещения РО
dl/dt = tgβ = ΔtимпS/Т
или с учетом (1) dl/dt= γS.
Преобразовав по Лапласу, получим WИМ(p) = L(p)/Г(р) = S/р.
Т.о., по каналу «скважность следования импульсов – усредненное перемещение РО» ИМ постоянной скорости можно представить интегрирующим звеном. Из рисунка видно, что при неизменной скважности чем меньше Δtимп и Δtпауз (а, следовательно Т) тем точнее будет реализация интегрального закона (пилообразная кривая будет ближе к прямой, изображающей среднюю скорость перемещения РО). Однако при этом повышается частота включения ИМ а, следовательно, его износ. Если ИМ с пусковым устройством охватить отрицательной ОС в виде усилительного звена с передаточной функцией WОС(p) = kос
то при релейно-импульсном регуляторе c ИМ постоянной скорости можно реализовать закон П-регулирования.
При поступлении на вход регулятора рассогласования | ε | > Δ нч/ 2 включается и перемещает РО в сторону ликвидации рассогласования. Перемещение РО через канал ОС пердается в виде сигнала ξ, который уменьшает результирующий сигнал σ, воздействующий на релейный элемент. При | σ | < Δ нч/ 2 ИМ отключится. Т.к. сигнал ОС ξ = kос l, то в установившемся состоянии σ = ε – kос l < Δ нч/ 2. Ввиду того, что Δ нч регулятора имеет малое значение это выражение можно записать как ε = kос l = 0. Откуда WР(p) = L(p)/Е(р) = 1/ kос. Т.о. такая схема приближенно реализует П-закон регулирования с коэффициентом передачи kР =1/ kос .
C помощью импульсного регулирования можно реализовать закон ПИ-регулирования по следующей структурной схеме:
WОС(p) = k/(1 + Тр).
В качестве обратной связи в большинстве современных регуляторов используются RC-цепи. Исполнительные устройства
хр- командный сигнал информации; l, ω - линейное и угловое перемещения; Q, N - относительный расход вещества или энергии через ОУ. ДБ - дополнительные блоки.
Из гидравлики известно, что расход вещества через ОУ: Q = f(ΔР, υ, ρ, с1, с2,..., cn),
где ΔР - перепад давления в гидравлической системе (локальный участок АСР); υ, ρ - кинематическая вязкость и плотность среды; с1, с2,..., cn - гидравлические характеристики технологического оборудования, характеризующие интенсивность рассеивания энергии вещества (коэффициент расхода, модуль вязкости и т.п.). Тип ИУ зависит от того какой из аргументов уравнения выбран в качестве определяющего: 1). ΔР = f(хр) - такой способ называется недроссельным и технически реализуется на базе насосов путем изменения их напора или производительности. Применяются насосы объемного дозирования (шестеренчатые, поршневые, шиберные, сильфонные и мембранные) и постоянного напора (червячные и центробежные). 2). υ = f(хр) – такие ИУ редкость; основаны электро-реологическом эффекте, где вязкость есть функция от напряженности магнитного поля для полярных жидкостей. 3). ρ = f(хр) – таких ИУ нет. 4). сi = f(хр) – в гидросистему вводится элемент с переменной интенсивностью рассеивания энергии в зависимости от хр. Такой способ называется дроссельным, а сам этот элемент – регулирующим органом. ИУ классифицируют: - по принадлежности к ветви ГСП (пневматические, электрические, гидравлические); - по типу РО в структуре ИМ: а) стандартные (на которые есть ГОСТы) – односедельные, двухседельные, трехходовые, диафрагмовые, шланговые, заслонки; б) нестандартные – односедельные, двухседельные, шаровые, задвижки.
Исполнительные механизмы.
ИМ - это устройство, предназначенное для перемещения РО.
Электрические ИМ.
Достоинства: - возможность удаления ИМ от регулирующего устройства на неограниченные расстояния; - создание больших перестановочных усилий (до 25 тонн) [перестановочные усилия – усилия, которые преодолевает ИМ при управлении РО]; - относительно высокий класс точности (±1). Недостатки: - трудность создания конструкции во взрыво-пожаробезопасном исполнении; - сложность конструкции, наладки, обслуживания; - большая масса и стоимость. Различают электромагнитные и электродвигательные ИМ.
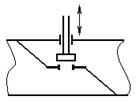
Электромагнитные ИМ. Данные устройства не входят в состав ГСП (нет нормирующих преобразователей, нет расчетных методик). Носят также название соленоидных. Наибольшее распространение среди них получили электромагнитные приводы серии ЭВ. Это прямоходные механизмы позиционного действия. Имеют простые конструкции и схемы управления. Неотъемлемой частью электромагнитных ИМ является электромагнит, сердечник которого играет роль затвора, т.е. роль подвижного РО.
1 – индукционная катушка; 2 – затвор; 3 – седло; 4 – регулирующий орган.
Среди них различают непосредственного действия и с усилием. РО сильно влияет на работу ИМ, т.к. является источником двух сил нагрузки: гидростатической (из-за перепада давления на затворе) и гидродинамической (обусловленной силой вязкого трения в пограничном слое затвора). Это вызывает вибрацию, сотрясения, нелинейность расходных и ходовых характеристик устройств. Для устранения этих недостатков и используются ИМ с усилением, роль которых играют мембраны, поршни, спицы, отводные каналы и т.п. Применение электромагнитных ИМ ограничивается позиционным характером действия и массой РО, ибо для создания необходимого усилия при перемещении тяжелого РО приходится значительно увеличивать силу тока катушек соленоида (устройства становятся громоздкими и невыгодными). Электродвигательные ИМ. Основными элементами данных устройств являются: - двигатель; - путевой выключатель (конечные выключатели, датчики ОС); - редуктор (понижает число оборотов двигателя и увеличивает крутящий момент на его валу). Электродвигательные ИМ могут также снабжаться: - указателем положения выходного органа; - дистанционной сигнализацией положения РО; - автоматическим пуском и дистанционным управлением; - ручным приводом; - тормозом и др. Различают устройства с постоянной и переменной скоростью вращения выходного органа, а также однооборотные и многооборотные. В настоящее время наиболее распространены среди них ИМ серии МЭ: МЭО – однооборотные; МЭМ – многооборотные; МЭП – прямоходные; МЭОК – управление с помощью контактных устройств; МЭОБ – управление с помощью бесконтактных устройств. МЭК (МЭК-Б) – с переменной скоростью вращения, управление с помощью контактных (бесконтактных) устройств;
А). ИМ с постоянной скоростью вращения В таких механизмах скорость перемещения не зависит от величины сигнала управления, а направление перемещения определяется знаком входного сигнала. Функциональная схема такого ИМ выглядит следующим образом: хр- командный сигнал информации; l, ω - линейное и угловое перемещения (ωд = const).
Б). ИМ с переменной скоростью вращения Рассмотрим принципиальную схему такого устройства. В данном механизме используется обратная связь по частоте вращения асинхронного двигателя. Величина и фаза переменного входного напряжения Uвх является управляющим сигналом и определяет значение тока в выходных цепях ФЧУВ, а следовательно и сопротивление рабочих обмоток магнитных усилителей МУ. При одной фазе МУ1 открывается, а МУ2 запирается, а при изменении фазы напряжения на 180° - наоборот. При этом двухфазный асинхронный двигатель реверсируется. Если Uвх = 0 оба МУ ненасыщенны и их сопротивление велико по сравнению с сопротивлением обмоток электродвигателя. На конденсаторе ток равен нулю и двигатель неподвижен.
ФЧУВ – фазочувствительный управляющий выпрямитель; Rос – сопротивление обратной связи.
Регулирующие органы
РО называется технический элемент, непосредственно воздействующий на входной сигнал объекта управления путем изменения пропускной способности. РО называется звено ИУ, воздействующее непосредственно на процесс в объекте управления путем изменения пропускной способности. Пропускная способность – это расход вещества или энергии, проходящего через РО. Конкретно для вещества – это его расход при определенном перепаде давления и выражается в м3/час. Основными РО являются клапаны, заслонки, шиберы.
Клапаны (дроссельные РО) применяются для жидкостей и газов. Бывают одно и двух седельные, шланговые, мембранные.
Шиберы (задвижки) применяются для жидкостей и газов. Основной элемент затвор.
|
||
|
|
Последнее изменение этой страницы: 2016-08-15; просмотров: 800; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.214 (0.008 с.) |

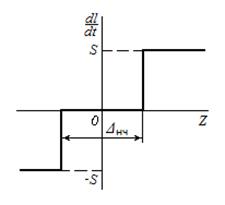 Без учета времени разгона и торможения характеристика записывается как dl/dt = f(Z),
Без учета времени разгона и торможения характеристика записывается как dl/dt = f(Z), Статическая характеристика ИМ постоянной скорости является существенно нелинейной. Однако такой ИМ может иметь достаточно близкие к линейным характеристики при релейно-импульсном изменении входного сигнала. Подадим на его вход подавать импульсы входного сигнала Zн (напряжения) с периодом следования Т и скважностью
Статическая характеристика ИМ постоянной скорости является существенно нелинейной. Однако такой ИМ может иметь достаточно близкие к линейным характеристики при релейно-импульсном изменении входного сигнала. Подадим на его вход подавать импульсы входного сигнала Zн (напряжения) с периодом следования Т и скважностью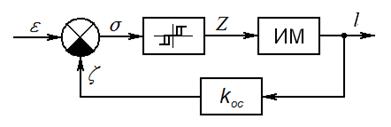
 Переходная характеристика при поступлении на вход единичного ступенчатого воздействия (сигнала ε(t)=1) здесь будет выглядеть следующим образом
Переходная характеристика при поступлении на вход единичного ступенчатого воздействия (сигнала ε(t)=1) здесь будет выглядеть следующим образом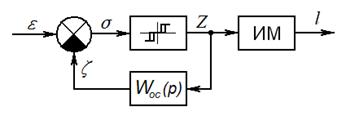 В этом случае релейный усилитель при включении ИМ охватывается отрицательной ОС в виде апериодического звена первого порядка с передаточной функцией
В этом случае релейный усилитель при включении ИМ охватывается отрицательной ОС в виде апериодического звена первого порядка с передаточной функцией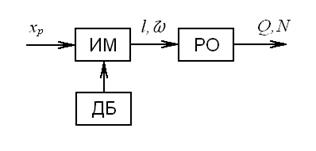 ИУ - это силовые устройства, воздействующие на технологический процесс в соответствии с полученным командным сигналом. Они состоят из двух функциональных блоков: исполнительного механизма (ИМ) и регулирующего органа (РО), и могут оснащаться дополнительными блоками.
ИУ - это силовые устройства, воздействующие на технологический процесс в соответствии с полученным командным сигналом. Они состоят из двух функциональных блоков: исполнительного механизма (ИМ) и регулирующего органа (РО), и могут оснащаться дополнительными блоками.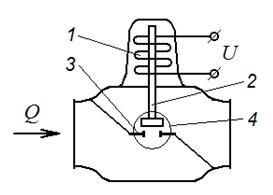 Рассмотрим электромагнитный ИМ с односедельным РО.
Рассмотрим электромагнитный ИМ с односедельным РО. Позиционер – регулятор положения выходного звена ИМ.
Позиционер – регулятор положения выходного звена ИМ.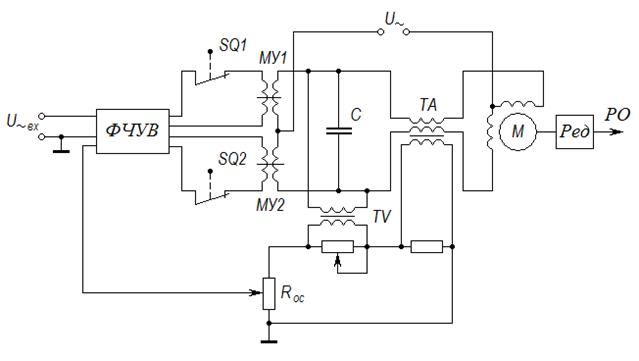
 Заслонки применяются для газа, пара, твердых частиц (гранул). Основной элемент круглый диск или диск двоякой кривизны.
Заслонки применяются для газа, пара, твердых частиц (гранул). Основной элемент круглый диск или диск двоякой кривизны.