
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Множительно-делительные устройства.Содержание книги Поиск на нашем сайте
Простейшим элементом, посредством которого удается получить умножение и деление, является уравновешенный мост постоянного тока. Однако эти устройства имеют много недостатков и точность их невелика. В качестве М-Д устройств используют операционные усилители и микросхемы, реализующие следующие зависимости Uz = kмUxUy. Uz = kд(Ux / Uy) Существуют устройства прямого и косвенного действия. П о способу построения схем устройства прямого действия могут быть разомкнутого (а) и замкнутого типа (б).
Коэффициент передачи в первых пропорционален управляющему параметру и их точность определяется качеством работы элементов с регулируемым коэффициентом передачи. Поэтому к таким элементам предъявляются жесткие требования по линейности, стабильности и динамическому диапазону характеристики Вторая схема является более совершенной, в ней изменение коэффициента передачи осуществляется автоматически в цепи с отрицательной обратной связью. Это повышает точность, расширяет динамический диапазон и снижает требования к элементам с регулируемым коэффициентом передачи. Для такой схемы можно записать Uр = k[Uд kП1 (Uр) - Uх].
Откуда
При большом коэффициенте усиления k для этого выражения справедливо
Тогда выходное напряжение устройства
Усилительные устройства Усилительные устройства – это такие преобразовательные устройства, которые позволяют малым на входе сигналом управлять значительным сигналом по мощности на их выходе. Электрические усилители предназначены как для управления электродвигателями, так и для увеличения коэффициента усиления (преобразования) в замкнутых системах управления в целях улучшения их качественных показателей. Данные устройства подразделяются на три группы: электромашинные, магнитные и электронные. Основные требования к усилительным устройствам: – высокий коэффициент усиления; – плавность изменения выходной величины; – отсутствие гистерезисных явлений; – малая инерционность; – бесконтактность; – высокая надежность и долговечность; – стабильность характеристик (статических, динамических) при изменении напряжения, частоты, температуры; – малая металлоемкость; – простота конструкции.
Электромашинные усилители
Данные устройства относятся к вращающимся усилителям, представляющим собой электрические генераторы постоянного тока. Они подразделяются - на обычные электромашинные (генераторы постоянного тока) и специальные электромашинные с поперечным полем (ЭМУ). Первые не используются из-за низкого коэффициента усиления. Нашли применение устройства поперечного поля. У них на коллекторе имеются две пары щеток, которые замкнуты накоротко. В индукторе ЭМУ имеются 2 или 4 обмотки управления. Если через обмотку управления ОУ1 пропустить ток, то намагничивающая сила от магнитного потока Ф1 при вращении машины с постоянной скоростью будет наводить ЭДС на щетках 1-1. Т.к. они замкнуты накоротко, то в якоре потечет ток силой I2, который в свою очередь создает намагничивающую силу и поток Ф2. Поскольку сопротивление обмотки 1-1 мало то уже малый Ф1 вызовет возникновение большого магнитного потока Ф2. Этот поток является неподвижным в пространстве, в нем вращается якорь ЭМУ, создавая ЭДС на щетках 2-2. При подключении к щеткам нагрузки по внешней цепи потечет ток силой I3, создающий поток Ф3, направление которого противоположно потоку Ф1. Для того чтобы, при увеличении магнитного потока Ф3, приводящего к увеличению потока Ф2, машина не стала неуправляемой, действие первого компенсируется. Это достигается введением компенсационной обмотки (КО), обтекаемой током силой I3. ЭМУ имеет две ступени усиления. Коэффициент усиления по мощности первого 40-200, второго 50-200
Достоинства: - большой коэффициент усиления по мощности (до 104); - значительная выходная мощность (до 10 кВт); Недостатки: - наличие щёточных контактов; - нелинейность статических характеристик; - наличие гистерезиса выходной величины; - ограниченный срок службы (из вращающихся частей); - инерционность; - низкий КПД. Электронные усилители Электронные – электронно-ионные и полупроводниковые. Первые практически перестали использовать из-за крупных габаритов и хрупкости элементов. В настоящий момент применяются в основном усилители, выполненные на полупроводниковых элементах (вентильные): управляемые и неуправляемые. Устройства управляемые (транзисторы, тиристоры) служат для управления напряжением или мощностью на выходе, или функционируют в режиме ключей. Т.е. они могут работать в непрерывном, либо в дискретном режимах.
Чаще всего используются для изменения частоты вращения двигателей, а также в качестве промежуточных усилителей, средств осуществления обратной связи, пускорегулирующих элементов. Широко применяются в электрических регуляторах. Достоинства: - высокий коэффициент усиления (до 106); - быстродействие; - малые габариты и вес; - большой срок службы; - возможность управления напряжением и мощностью в широких пределах; - высокий КПД; - суммирование большого числа сигналов. Недостатки: - разброс выходных характеристик; - трудность настройки.
Магнитные усилители
Принцип действия основан на использовании нелинейных магнитных характеристик ферромагнитных материалов (изменения индуктивности рабочей обмотки в зависимости от насыщения ферромагнитного сердечника). Достоинства МУ: высокая надежность, практически неограниченный срок службы, большая выходная мощность, возможность усиления малых сигналов. Их используют как усилители входных сигналов, поступающих от датчиков и других элементов автоматики, применяют в измерительных устройствах, вычислительных машинах. Данные устройства подразделяются на нереверсивные (однотактные) и реверсивные (двухтактные). МУ состоит их замкнутых ферромагнитных сердечников (их бывает обычно 2 или 3) на каждом из которых располагается обмотка. Одна из них является управляющей, а другие рабочими. МУ также называются дроссельными. Данные устройства подразделяются на реверсивные (однотактные) и реверсивные (двухтактные). Катушки могут работать от одно-и трехфазных токов, а выходной величиной может быть переменный, либо постоянный ток. Как правило, рабочая катушка питается, переменным током, а управляющая – постоянным. Рассмотрим МУ, состоящий из трех сердечников. Его рабочая часть состоит из двух обмоток W1 и W2, которые расположены на крайних сердечниках и подключаются между собой последовательно и встречно, либо встречно-параллельно. Чаще подключение последовательное. Сопротивление нагрузки Rн подключается в цепь либо последовательно рабочим обмоткам, либо (реже) параллельно им. Обмотка управления WУ, расположенная на среднем сердечнике, обеспечивает его подмагничивание. Следовательно, от изменения тока в ней будет зависеть ток в рабочих обмотках и цепи нагрузки, а также выходное напряжение, т.е.
В = j(Н), ограниченную тремя прямыми, где Н – напряжение магнитного поля; В - магнитная индукция; Вs - ндукция насыщения. Т.е. при Н = 0, m ® µ и, следовательно, индуктивность рабочих обмоток L ® ∞. Скорость изменения магнитной индукции ½ dB/dH ½ ® ∞, а ½ B ½ < ½ Bs ½. В этом случае Iн = 0. Когда Н > 0, m = 0 и L = 0 и тогда ½ dB/dH ½ = 0, а ½ B ½ = ½ Bs ½. При этом Iн ® ∞. Рассмотрим работу МУ при Iy = 0, когда нагрузка носит активный характер, сопротивление цепи управления мало, т.е. Rу << Rр + Rн и R ® 0. Магнитные потоки Ф1 и Ф2, создаваемые намагничивающими силами переменного тока направлены (в среднем сердечнике) навстречу друг другу и компенсируют друг друга, что исключает наведение здесь ЭДС переменного тока. Т.е. при подаче к рабочей цепи напряжения, которое меняется по синусоидальному закону U = Um sinwt, оба сердечника будут перемагничиваться. Индукции в них равны и будут изменяться по синусоидальному закону В1 = В2 = Вmsin(wt - p/2). При этом параметры усилителя выбирают так, чтобы Bm < Bs. Следовательно, магнитная проницаемость m и индуктивность рабочих катушек L велика, оба сердечника ненасыщенны и напряжение будет полностью приложено к рабочим обмоткам, а, следовательно, Iн = 0. В реальных МУ при Uу = 0 в рабочих обмотках протекает ток холостого хода.
При наличии входного сигнала магнитодвижущая сила Iywy создает в сердечниках постоянную составляющую индукции B0, которая в каждый полупериод подмагничивает один и размагничивает другой сердечник. Тогда индукции в сердечниках В1 = - Вmcoswt + B0 ; (1,2) В2 = - Вmcoswt - B0 , а, результирующая индукция В1 - В2 = 2В. В начальный момент при wt = 0 В1 = - Вm + B0 - первый сердечник размагничивается, В2 = - Вm - B0 = Вs - а второй вступает в насыщение. Это ведет к резкому уменьшению m и L, ЭДС в рабочих обмотках наводиться не будет, и все напряжение источника питания будет приложено к нагрузке. Это приводит к скачкообразному возникновению тока в выходной цепи, уменьшающемуся к концу полупериода. В дальнейшем индукция будет изменяться по (1,2) и в следующем полупериоде все повторится, но при этом в насыщение будет входить другой сердечник. При насыщении сердечника индукция в нем не будет изменяться до конца полупериода. Увеличение Iy вызывает увеличение постоянной составляющей индукции B0 в сердечниках и поэтому насыщение в ФМС наступает раньше, а длительность периода насыщения в течении которого протекает ток нагрузки увеличивается. Это обуславливает изменение среднего значения тока Iн, т.е. выходного сигнала.
I. Установившийся режим: А. Статическая характеристика
1 – идеальная 2 – реальная
Кривая 1: - точка О – режим холостого хода (Iу = 0 и Iн = 0); - участок ОВ – рабочий режим (0 < Iн £ Iнmax при 0 < Iу £ Iунас): 1) участок ОА – управляемый (0 < Iн < Iнmax при 0 < Iу < Iунас)
2) участок АВ – насыщения (Iн = Iнmax = const при Iу > Iунас)
Б. коэффициенты усиления: – по току – по напряжению – по мощности В. КПД II. Переходный режим. А. Дифференциальное уравнение где Б. Передаточная функция где до момента насыщения сердечника),
Sc – поперечная площадь сердечника.
МУ характеризуются также по величине «добротности», связывающей статические и динамические характеристики Т.к. h = const, следовательно, D = f(w).
Магнитные усилители с внешней обратной связью.
Дроссельные МУ, рассмотренные выше, имеют сравнительно небольшие коэффициенты усиления и достаточно инерционны. При образовании обратной связи в МУ используют выходной сигнал устройства для создания дополнительной постоянной составляющей магнитного поля, накладывающейся на магнитное поле входного сигнала. В МУ различают внешнюю, внутреннюю и смешанные обратные связи. Рассмотрим схему устройства с внешней ОС по току. Сигнал ОС, пропорциональный выходному току подается на отдельную обмотку wос. Создаваемая им МДС накладывается на МДС входного сигнала. Т.е. Iнwр ± Iywy = Iосwос (± - в зависимости от того положительная или отрицательная ОС) При Iн = Iос Iнwр = Iуwу ± Iнwос или Iн (wр ± wос) = Iуwу ;
Откуда На практике koc = 0,9 ¸ 0,97.
Когда отрицательной ОС, то в знаменателе данных выражений «+» и видно, что происходит уменьшение коэффициентов усиления. Когда же ПОС в знаменателе «–» и следовательно коэффициенты усиления увеличиваются. Увеличение может быть в 100¸900 раз.
Вначале, на статической характеристике МУ без обратной связи произвольно выбирается ряд точек А, В, С, Д, из которых проводятся прямые параллельные оси абсцисс и прямые параллельные прямой Iос = f(Iн). Из точек пересечения последних с осью абсцисс восстанавливаются перпендикуляры до пересечения с прямыми параллельными данной оси. Точки их пересечения А¢, В¢, С¢, Д¢ и будут являться статической характеристикой МУ с ОС. Как видно из графика достоинством данных усилителей является малое значение Iy, а недостатком большое значение тока холостого хода.
Магнитные усилители с внутренней обратной связью.
Wсм – обмотка смещения.
1 – кривая МУ без обмотки смещения; 2 – кривая МУ с обмоткой смещения; Iн - ток холостого хода; сd – рабочий участок. Т.к. току управления Iy должен соответствовать минимальный выходной сигнал (Iн ), статическая характеристика может быть смещена (кривая 1). Для того, чтобы этого не происходило, и используется одна из обмоток управления, которая называется обмоткой смещения.
Корректирующие элементы
Корректирующие устройства предназначены для обеспечения устойчивости в системах электроавтоматики и получения высоких качественных показателей процессов управления. Если система не обладает необходимыми динамическими свойствами, то изменяют ее структуру, вводя корректирующие элементы и выбирая их параметры. В зависимости от схемы включения КУ их делят на последовательные и параллельные. В первом случае КУ включают последовательно в цепь основного воздействия, а во втором – в цепь обратной связи, охватывающей одно или несколько звеньев системы. Возможно комбинированное включение последовательных и параллельных КУ. Сигналы на выходе корректирующих устройств представляют собой производные или интегралы во времени от вх. Сигналов управления (напряжения, частоты вращения, угла поворота вала двигателя и др.) Поэтому основным видом корректирующих устройств являются дифференцирующие, интегрирующие и интегродифференцирующие устройства. Возможны также и различные сочетания видов коррекции. Основная классификация КУ - по использованию вспомогательной энергии: пассивные и активные.
Пассивные КУ.
А).
Продифференцировав последнее выражение, получим
Подставив выражения (2) и (3) в (1) имеем Или Воспользовавшись преобразованием Лапласса, приводим это выражение к оператор- ному виду
Откуда передаточная функция Следовательно данное устройство реализует инерционное звено первого порядка.
Б).
Подставив (2) и (3) в выражение (1), получим
Проинтегрировав его имеем Или
Воспользовавшись преобразованием Лапласса, получим
Тогда передаточная функция примет следующий вид Следовательно данное устройство реализует дифференцирующее реальное звено.
Активные КУ. В качестве этих устройств используются элементы, реализующиеся на операционных усилителях (например, на транзисторных) и требуют вспомогательного источника питания.
Передаточная функция данного устройства определится следующим выражением
Т.к. коэффициент усиления достаточно велик (104 ¸106), то данную формулу можно представить в таком виде Операторные сопротивления z1(s) и z2(s) можно подобрать с высокой точностью и т.о. реализовать передаточную функцию.
Здесь z1(s) ® R и z2(s) ® C. Тогда
или где Ти = RC – постоянная времени интегрирования, а вся функция представляет собой интегрирующее звено.
Тогда или где Тд = RC – постоянная времени дифференцирования, а вся функция представляет собой дифференцирующее звено. Т.о., используя различные сочетания подключения конденсаторов и резисторов в цепь операционного усилителя, можно получить и другие динамические звенья.
Реле и релейные устройства
Реле – это устройства, у которых при достижении входной величиной определенного значения, сигнал на выходе изменяется скачкообразно. Реле классифицируются: 1) по роду физической величины, на изменение которой реагируют (по виду входного сигнала): а) электрические: токовые, напряжения, частоты, мощности и т.д.; б) неэлектрические: давления, температуры, уровня и др.; 2) по назначению: управления, времени, защиты, сигнализации и др.; 3) по реакции на изменение входного сигнала: - нейтральные (на реагируют на изменение знака сигнала), - поляризованные (реагируют на изменение знака сигнала); 4) по характеру воздействия на выходные цепи: - контактные (замыкают или размыкают выходные цепи) - электромеханические, - бесконтактные (изменяют какой-либо параметр) - магнитоэлектрические, полупроводниковые; 5) по исполнению: открытые, с защитным чехлом, пылебрызгозащитные, герметичные. Статическая характеристика данных устройств – релейная гистерезисная петля, которая объясняется неоднозначностью процессов при подаче и снятии входного сигнала.
Двухпозиционное (нейтральное) Трехпозиционное (поляризованное) с зоной нечувствительности Рис. 1: A) при подаче хвх (включение): 1) при хвх < хср хвых = хвых min; 2) при хвх = хср хвых = хвых max; 3) при хвх > хср хвых = хвых max; Б) при снятии хвх (выключение): 1) при хвх > хвоз хвых = хвых max; 2) при хвх = хвоз хвых = хвых min; 3) при хвх < хвоз хвых = хвых min.
Характеристики электрических реле: 1. Мощность срабатывания – это мощность потребляемая реле для его срабатывания. 2. Параметр срабатывания (как правило, время срабатывания – время от подачи хвх до момента воздействия реле на выходную цепь). 3. Параметр возврата (как правило, время возврата – время от снятия хвх до момента реле воздействия на выходную цепь). 4. Коэффициент возврата – это отношение параметра возврата к параметру срабатывания k = xср / хвоз < 1 (характеризует относительную ширину релейной петли статической характеристики). 5. Коэффициент усиления k = xвых max / хср. 6. Выходная мощность – это произведение максимально отключающего тока на напряжение питания N = UImax откл.
|
|||||||||
|
|
Последнее изменение этой страницы: 2016-08-15; просмотров: 477; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.137.164.200 (0.012 с.) |



 .
. .
. .
.
 Uвых = f(Uдр) или Iн = f(Iу).
Uвых = f(Uдр) или Iн = f(Iу). При анализе работы МУ для получения статических характеристик обычно рассматривают идеальное устройство, имеющее следующую характеристику намагничивания
При анализе работы МУ для получения статических характеристик обычно рассматривают идеальное устройство, имеющее следующую характеристику намагничивания Характеристики МУ:
Характеристики МУ: ;
;  ;
; ;
; ;
; ;
; ;
; ,
, , w - частота питающего напряжения.
, w - частота питающего напряжения. ,
, - время запаздывания (время от начала подачи сигнала
- время запаздывания (время от начала подачи сигнала .
.
 , где
, где  .
. ;
;  ;
; 
 Статическая характеристика данного МУ строится по статической МУ без обратной связи и прямой Iос = f(Iн), которая проводится из начала координат под углом a = arctg koc.
Статическая характеристика данного МУ строится по статической МУ без обратной связи и прямой Iос = f(Iн), которая проводится из начала координат под углом a = arctg koc.
 По рабочим обмоткам МУ протекает однополупериодный выпрямленный ток. Благодаря наличию диодов проводящий полупериод, который называется рабочим, чередуется с непроводящим управляющим полупериодом, причем каждый изних для одного сердечника будет рабочий, а для другого управляющим. Токи в рабочих обмотках возникают только в рабочий полупериод. Постоянная составляющая тока, пропорциональная току нагрузки, образует магнитодвижущую силу, под действием которой сердечник будет намагничиваться, вступая в насыщение, тем самым создавая эффект положительной обратной связи. Статическая характеристика данного МУ будет выглядеть следующим образом:
По рабочим обмоткам МУ протекает однополупериодный выпрямленный ток. Благодаря наличию диодов проводящий полупериод, который называется рабочим, чередуется с непроводящим управляющим полупериодом, причем каждый изних для одного сердечника будет рабочий, а для другого управляющим. Токи в рабочих обмотках возникают только в рабочий полупериод. Постоянная составляющая тока, пропорциональная току нагрузки, образует магнитодвижущую силу, под действием которой сердечник будет намагничиваться, вступая в насыщение, тем самым создавая эффект положительной обратной связи. Статическая характеристика данного МУ будет выглядеть следующим образом: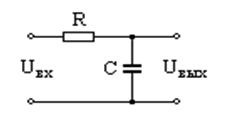 Не требуют вспомогательного источника тока и выполняются на R,C – элементах (резисторах, конденсаторах).
Не требуют вспомогательного источника тока и выполняются на R,C – элементах (резисторах, конденсаторах). (1);
(1); (2).
(2). (3).
(3). .
. , где T = RC – постоянная времени интегрирования.
, где T = RC – постоянная времени интегрирования. ,
, .
.
 (1);
(1); (2). Откуда
(2). Откуда  (3).
(3). (3).
(3). .
. , где T = RC – постоянная времени интегрирования.
, где T = RC – постоянная времени интегрирования. .
. .
.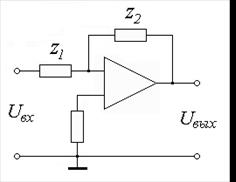 Активное корректирующее устройство содержит операционный усилитель постоянного тока (с коэффициентом усиления k) и операционные сопротивления во входной цепи z1(s) и в цепи обратной связи z2(s).
Активное корректирующее устройство содержит операционный усилитель постоянного тока (с коэффициентом усиления k) и операционные сопротивления во входной цепи z1(s) и в цепи обратной связи z2(s).
 .
.

 ,
, Если z1(s) ® C и z2(s) ® R.
Если z1(s) ® C и z2(s) ® R.
 ,
,




