
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
TV – трансформатор напряженияСодержание книги Поиск на нашем сайте
Основные понятия и терминология.
Автоматизация - это внедрение в производство технических средств, позволяющих освободить частично или полностью человека от непосредственного участия в управлении. Курс технические средства автоматизации изучает эти технические средства, их совокупность и взаимодействие между собой. Автоматика - отрасль науки и техники, разрабатывающая теорию и методы автоматизации процессов. Управление - (в автоматике) это любое воздействие на процесс с целью получения желаемого эффекта. Три составляющие части управления: - контроль за процессом; - анализ информации и принятие решения; - воздействие на процесс (исполнение). Функции автоматики: - управление (регулирование); - контроль; - сигнализация; - блокировка; - защита. Регулирование - это поддержание параметра относительно заданных значений (стабилизация параметра) или изменение его по определенному закону. Регулирование частный случай управления. Стабилизация частный случай регулирования. Контроль - это наблюдение за технологическими параметрами (с целью обеспечения правильного протекания технологического процесса). Сигнализация – это оповещение о состоянии производственного процесса с целью исключения брака и обеспечения безаварийности работы оборудования. Защита - отключение технологического оборудования и включение аварийных устройств в случае возникновения внештатных ситуаций в производстве. Блокировка – обеспечение протекания технологического процесса, безаварийности работы оборудования и исключения травматизма в случае каких-либо нарушений в производстве. Технологический процесс, на который направлено управление, осуществляется при помощи аппаратов, машин, установок, трубопроводов и другого оборудования, которые носят название объектов управления (ОУ). Технологический процесс характеризуется входными, выходными и возмущающими параметрами. f
xвх xзвых
 
Входные параметры - параметры, изменением которых можно влиять на выходные (изменение расхода, энергии, концентрацией компонента). Выходные параметры - параметры, которые наиболее полно характеризуют интенсивность протекания процесса. Возмущающие параметры - параметры, изменение которых приводит к отклонению выходных параметров от заданных значений. Совокупность технических средств, используемых для управления, и персонал, принимающий в нем непосредственное участие, образуют совместно с объектом систему управления (СУ). Автоматизированная СУ (АСУ) включает автоматические устройства, позволяющие частично освободить человека от функций управления. Автоматическая СУ (САУ) состоит только из ОУ и технических средств автоматизации (где человек лишь следит за состоянием последних). Рассмотрим примеры регулирования уровня.
Емкость – объект регулирования (управляемая система) Человек – регулирующая (управляющая) система – регулятор: 1) техническое задание (регламент) - задатчик (З); 2) глаза – датчик (преобразователь П); 3) мозг: – а) элемент сравнения (ЭС), б) устройство выработки управляющего сигнала (УВУС); 4) рука – исполнительный механизм (ИМ); 5) ладонь – регулирующий орган (РО). После замены человека техническими средствами управления функциональная схема автоматического регулирования уровня будет выглядеть следующим образом:
Регулирующ
устройство (бло
При технической реализации элементов систем регулирования З, ЭС и УВСУ, как правило, конструктивно выполнены едино и образуют регулирующий (управляющий) блок (устройство) (РБ). Часто совместно выполняются также ИМ и РО, образуя исполнительное устройство (ИУ). Система регулирования в простом (классическом) виде, содержит следующие основные элементы: ОУ, Д, РБ и ИУ. Простейшая САР содержит два основных элемента ОУ и регулятор, который образуют П, РБ и ИУ. Применительно к системе управления, т.е. в общем случае техническая СУ состоит из управляемой и управляющей систем.
Основные технические средства электроавтоматики: - преобразователи (датчики); - управляющие устройства: - цифровые управляющие машины, микропроцессоры и микроконтроллеры; - автоматические регуляторы; - электроконтактные схемы управления, логические схемы управления, выполненные на элементах пневмоники и электроники; - исполнительные устройства, исполнительные механизмы, регулирующие органы. Основные элементы электроавтоматики: - суммирующие, множительные и делительные устройства; - усилительные устройства; - корректирующие устройства; - переключающие устройства; - реле устройства. Электроавтоматика - раздел автоматики, изучающий совокупность объекта управления и электрических систем управления, взаимодействующих между собой.
Схемы электро- и пневмоавтоматики: 1) принципиальная – когда на схеме показываются все элементы системы или устройства и связи между ними; 2) функциональные – когда вся система или устройство разбивается на простейшие элементы по роду выполняемых функций (элементы изображаются в виде прямоугольников, внутри которых записываются их функциональное назначение, а связи между ними показываются линиями; 3) структурные – когда система или устройство разбиваются по динамическому признаку и состоит из динамических звеньев, узлов суммирования и разветвления (звенья изображаются в виде прямоугольников, внутри которых записывается их передаточная функция, а связи показываются линиями со стрелками).
Преобразователи Преобразователи (датчики) - это устройства для преобразования входной величины в соответствующий выходной сигнал, удобный для использования или передачи его на расстояние. Преобразователи бывают простые, состоящие из одного элемента (П) и более сложные, состоящие из двух элементов: чувствительного элемента (ЧЭ) и промежуточного преобразователя (ПП) и реже большего количества элементов.
t – входной параметр х; E(t t0) – выходной сигнал у.
Функциональная схема выглядит так
мембранная коробка – чувствительный элемент (ЧЭ); индукционная катушка со стержнем – промежуточный преобразователь (ПП); Р – входной параметр х; l – входной параметр х1; Uвых (t t0) – выходной сигнал у.
Функциональная схема выглядит так
Преобразователи, которые преобразуют непосредственно технологический параметр принято называть первичными или датчиками. Характеристики датчика: 1) статическая характеристика, имеющая следующий вид хвых = f(хвх)½t®¥; 2) динамическая характеристика, имеющая следующий вид хвых = f(хвх, t); 3) чувствительность – это отношение изменения выходного сигнала к изменению входного, вызвавшего это отклонение 4) порог чувствительности - минимальное значение входной величины при котором начинает изменяться выходная величина; 5) номинальная погрешность - максимально допустимая погрешность. Классификация: - по виду входной величины: а) датчики преобразования технологического параметра (неэлектрической величины) в электрический сигнал, б) датчики преобразования электрической величины в другую; - по характеру преобразования входной величины в выходную: а) параметрические, б) генераторные. П.д. - это датчики, в которых изменение входной неэлектрической величины преобразуется в изменение какого-либо электрического параметра (активного сопротивления, индуктивности, емкости и т.д.). – это датчики, требующие дополнительного источника энергии Г.д. - это датчики, в которых входная величина преобразуется в ЭДС. К параметрическим датчикам относятся потенциометрические, емкостные, индуктивные, тензометрические. К генераторным - термопары, тахометрические, пьезо- и фотоэлектрические. Преобразователи бывают простые, состоящие из одного элемента и более сложные, состоящие из двух элементов: чувствительного элемента и преобразователя. Потенциометрические датчики Потенциометрические датчики – преобразуют линейное или угловое перемещение в соответствующее изменение выходного тока или напряжения. Выполнены в виде каркаса на котором намотана проволока по которой движется скользящий контакт. По конструктивному исполнению каркаса (проволокодержателя) различают: плоские и цилиндрические (с прямолинейным перемещением), а также кольцевые и спиральные. Если при перемещении движка выходное напряжение должно изменяться по определенной нелинейной функции, то применяются профильные, ступенчатые, синусно-косинусные и др. потенциометры. Различают: одноконтактные (не реагируют на изменение знака сигнала) и двухтактные (реагируют на изменение знака сигнала, т.е. изменение знака входного перемещения приводит к изменению фазы выходного напряжения на 1800).
Одноконтактные:
и следовательно Uвых является линейной функцией, т.к. не зависит от Rн. Статическая характеристика выглядит следующим образом.
Недостаток: теоретически получается прямая, а реально - пилообразная кривая за счет перескакивания подвижного контакта с одного витка на другой. При Rн ¹ 0 (рабочий режим) аналитическое выражение для выходного параметра выглядит следующим образом
Статическая характеристика при различном сопротивлении нагрузки выглядит следующим образом. Потенциометрический датчик, как звено АСР рассматривается вместе с сопротивлением нагрузки. При активной нагрузке является безинерционным звеном а при активно-реактивной нагрузке проявляются инерционные свойства. Двухконтактные:
Недостатки п.д.: наличие скользящего контакта (надежность снижается, требуются усилия для перемещения), ступенчатость статических характеристик и их нелинейность при больших нагрузках по току и мощности.
Емкостные датчики
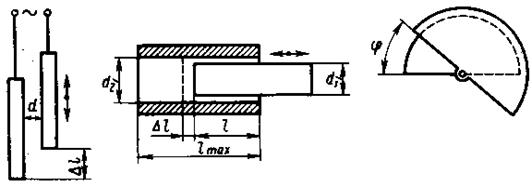
Емкостные датчики преобразуют линейное или угловое перемещение в изменение емкости конденсатора где d - расстояние между обкладками конденсатора (электродами); ε - диэлектрическая проницаемость среды; s - суммарная площадь электродов, составляющих конденсатор. Тип датчика определяется в зависимости от того какой из параметров уравнения (1) принят в качестве регулирующего. 1) с = f(s)| d,ε = idem ("idem" - не влияет на функцию) Применяются при перемещениях более 1 мм. Во всех случаях одна обкладка конденсатора неподвижна и соединена с корпусом измерительного прибора, а другая подвижна и соединена с первичным преобразователем. Среди них различают: - плоские, цилиндрические (линейного перемещения); - поворотные (поворотного типа). а) плоские б) цилиндрические в) поворотные
2) с = f(d)| s,ε = idem
Недостаток - нелинейность ст. характеристики. Однако, при малых перемещениях (менее 1 мм) величиной можно получить линейную зависимость с малой погрешностью. Датчики такого типа обладают большой чувствительностью и используются при малых перемещениях. 3) с = f(ε)| d, s,= idem Эти датчики используются для измерения уровня, состава и концентрации жидких веществ, а также для толщины и влажности твердых диэлектриков. Электрическая емкость может меняться либо от соотношения сред с различной диэлектрической проницаемостью, занимающих объем конденсатора, либо от изменения среды, входящей в конденсатор. Первые представляют собой сложный конденсатор, состоящий из двух параллельно включенных конденсаторов с различной диэлектрической проницаемостью
Статическая характеристика в данном случае линейна. Вторые представляют собой конденсатор с двухслойным диэлектриком, выполненный в виде двух последовательно включенных конденсатора, эквивалентная емкость которых определяется следующим выражением
Индуктивные датчики
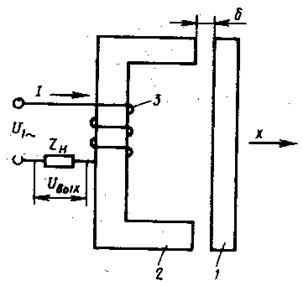
И. д. преобразуют линейное или угловое перемещение в изменение индуктивности обмотки с магнитопроводом. Различают одноконтактные и двухтактные (или дифференциальные).
I. Одноконтактные Среди них выполняются конструкции с переменной величиной воздушного зазора и с переменной площадью воздушного зазора. А. С переменнной величиной воздушного зазора
2 – подвижный якорь; 3 – катушка; d - величина воздушного зазора. В данном случае L = W2/Rd, где L – индуктивность катушки; W – число витков обмотки; Rd – магнитное сопротивление воздушного зазора. Rd = 2d / (m0s), где s – площадь воздушного зазора; m0 – магнитная проницаемость воздушного зазора. Тогда L = W2m0s / (2d)
При активной нагрузке в малых перемещениях (до 1 мм) и Rоб >> Rн U =UR /(wL) = 2dUR /(wW2m0s) =kd, где k = 2UR /(wW2m0s), w - угловая частота питающего напряжения. Статическая характеристика: Uвых = f(d) Недостатки: 1) наличие остаточного напряжения при малых d (влияние магнитного сопротивления магнитопровода); 2) при больших d нелинейность (влияние токов рассеивания);
Б. С переменной площадью воздушного зазора 1 – соленоид; 2 – подвижный сердечник. Работа аналогична предшествующему устройству. Применяется при перемещениях от 5 до 50 мм. Недостатки: 1) наличие остаточного напряжения; 2) не реагирует на малые перемещения; 3) не реагирует на изменение знака сигнала. II. Дифференциальные
1 – магнитопроводы с обмотками W1 и W2 2 – подвижный якорь Датчики угла поворота
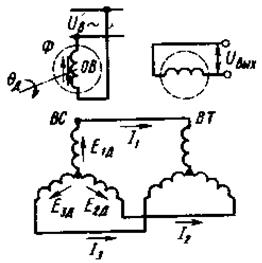
В качестве датчиков угла поворота на ряду с резисторными, индуктивными и емкостными применяются сельсины и трансформаторы. Сельсины. [«Сельсины» - одновременные (с греческого)]. Различают контактные и бесконтактные. В первых на статоре размещают однофазную обмотку, а на роторе трехфазную или наоборот. В бесконтактных на статоре обе обмотки, а ротор выполняют специальной конструкции с немагнитной прослойкой. Распространение получили контактные. Их однофазная обмотка является обмоткой возбуждения, а трехфазная состоит из трех симметричных синхронных обмоток. Сельсинная система измерения (передача) состоит из двух сельсинов: сельсина -датчика (ВС) и сельсина – приемника (ВЕ). Первый соединен с первичным преобразователем (ПП), а второй с вторичным прибором (ВП). Для работы применяют два режима: индикаторный и трансформаторный.
В – обмотка возбуждения; Ф – магнитный поток; Е – ЭДС; q – угол поворота; «д» – датчик; «п» – приемник.
Представляет собой следящую систему, где ОВ сельсинов ВС и ВЕ включают в общую однофазную цепь переменного тока, а трехфазные обмотки синхронизации соединяют между собой одноименными выводами. При подаче переменного напряжения в ОВ возникает пульсирующий магнитный поток, под действием которого в обмотках синхронизации возникает ЭДС. При qд = qп (согласованном положении) возникают равные ЭДС (DЕ = Е1 – Е2 = 0) и соответственно равные токи в обмотках, а следовательно результирующие токи в обмотках равны 0. При этом I = DЕ/(2z), где z – сопротивление одной фазы. При перемещении датчика изменяется qд. Появляется результирующий ток, который взаимодействуя с магнитным потоком Ф ВЕ создает вращающий момент, под действием которого ротор ВЕ поворачивается на угол qп до при котором наступает новое равновесие схемы. Вращающий момент при этом М = Мmaxf(q), где q = qд -qп. - угол рассогласования. Моментно-угловая зависимость М = f(q) является статической характеристикой сельсинной пары в индикаторном режиме.
Статическая характеристика при малых углах рассогласования (от 0 до 300) линейна. 2) Трансформаторный
Обмотка возбуждения сельсина датчика включается в сеть переменного тока. А выходное напряжение снимается с ОВ ВТ. Появившиеся в обмотках синхронизации токи создают в ВТ магнитный поток Ф, направленный под углом q к продольной оси выходной однофазной обмотки, под действием которого в обмотке возбуждения сельсина ВТ наводится ЭДС Е» Uвых = Umax cosq
Нулевой отчет берется при сдвиге роторов ВС и ВТ на 900. Следовательно Uвых = Umax cos(q +900) = Umax sinq Тогда при малых q sinq» 0, т.е. Uвых = Umax f(q)
Вращательные трансформаторы. Данные устройства представляют собой электрические машины индуктивного типа и применяются для функционального преобразования угла поворота в электрический сигнал. Представляют собой электрические машины индукционного типа, в которых статор и ротор имеют по две взаимно перпендикулярных обмотки. Для работы применяют два режима: синусно-косинусный и линейный. 1) Синусно-косинусный
Uвых1 = U (W2/W1) sinq - синусоида;
Uвых2 = U (W2/W1) cosq - косинусоида;
где W2/W1 = k –максимальный коэффициент трансформации. Угол сдвига кривых q равен 900. 2) Линейный. Работа аналогична вышеприведенному режиму. У линейно вращающегося трансформатора выходное напряжение является функцией угла поворота
Линейность данной зависимости обеспечивается при углах j = ± 600. Максимальное значение при W2/W1 = 0,5 функция (3) принимает при jmax = 1200. Датчики частоты вращения
Применяются для преобразования частоты вращения рабочих механизмов в напряжение. Представляют собой тахометрические генераторы - небольшие электрические машины постоянного и переменного токов. Для преобразования частоты вращения электродвигателей в напряжение применяются тахометрические мосты. Тахогенераторы постоянного тока. В зависимости от способа возбуждения выполняются двух видов: - магнитоэлектрические – возбуждение от постоянных магнитов; - электромагнитные – возбуждение от специальной обмотки на статоре.
GT – тахогенератор; w - частота вращения.
Создавая постоянное магнитное поле, под действием которого в обмотке GT наводится ЭДС, которая функцией от частоты вращения. Напряжение на выходе датчика Uвых» E – IRя = Iw. – IRя» kw., где Rя – сопротивление якорной цепи; I - сила тока нагрузки; k – угловой коэффициент; «я» - якорная цепь. При холостом ходе, когда I = 0 Uвых = E =сw., где с = const, т.е. Uвых = f(w).
В динамическом отношении GT при работе на активную нагрузку (Rн) рассматривают как безинерционное звено, а при работе на активно-индуктивную нагрузку (Rн, Lн) – как апериодическое звено первого порядка, где постоянная времени T = (Lн + Lя) / (Rн + Rя).
Недостатком является наличие коллектора и щеток.
Тахогенераторы переменного тока. Разделяются на синхронные и асинхронные. 1) Синхронные GT – однофазные синхронные машины с ротором в виде постоянного магнита. У синхронных GT с изменением частоты вращения w вместе с амплитудой изменяется и частота выходного напряжения, наводимого в обмотке статора. В динамическом отношении является безинерционным звеном.
ОВ – обмотка возбуждения; ГО – обмотка генератора. Обмотки сдвинуты относительно одна другой на 900. При вращении ротора в ГО наводятся ЭДС трансформации и вращения. Под действием ЭДС вращения на выходе GT возникает переменное напряжение выхода. При изменении напряжения ротора фаза выходного напряжения изменяется на 1800. Асинхронные GT используются как датчики угловой скорости, частоты вращения и ускорений (в последнем случае обмотка возбуждения подключается к источнику постоянного тока). Достоинствами рассмотренных датчиков являются надежность, малая инерционность, отсутствие коллектора и щеток. Недостатки: нелинейность статических характеристик, наличие на выходе остаточной ЭДС при неподвижном роторе, малая выходная мощность, сравнительно большие габариты.
Тахометрические мосты. ТМ постоянного и переменного тока применяют в системах автоматики для создания обратной связи по частоте вращения электрических двигателей. Их применение позволяет упростить систему, т.к. отпадает необходимость в дополнительной машине – GT. При этом уменьшается статическая и динамическая нагрузка на исполнительный двигатель.
К диагонали ав подводится напряжение сети, питающей якорь двигателя, а с диагонали сд снимается выходное напряжение, пропорциональное угловой частоте. Статической характеристикой ТМ является функция Uвых = f(w) и справедлива при больших сопротивлениях на нагрузке.
2) ТМ переменного тока. Для контроля частоты вращения асинхронных двигателей применяют бесконтактные параметрические устройства, трансформаторы тока и напряжения.
ТМ переменного тока повышают надежность работы САУ. Суммирующие устройства. Различают в основном два способа алгебраического суммирования: - суммирование напряжений (ЭДС); - суммирование токов.
1. Суммирование с помощью потенциометров.
А. При помощи последовательного соединения резисторов (суммирование напряжений).
R i – внутреннее сопротивление источника тока
Если
Б. При помощи параллельного соединения резисторов (суммирование токов).
R i – постоянное сопротивление для ограничения тока в цепи источника ЭДС; R i i – внутреннее сопротивление источника тока. Для данного соединения, если Rii << Ri << Rн,можно записать
При условии, что
2. Суммирование с помощью мостовых схем (суммирование напряжений).
Для данной схемы Тогда
Т.к. с выхода первого моста на диагональ второго поступает полусумма напряжений U1 и U2, то для обеспечения одинакового коэффициента усиления по всем входам напряжение U3 необходимо предварительно разделить пополам делителем сопротивления. Выходное напряжение для данного случая примет следующий вид
Для суммирования n напряжений требуется n - 1 последовательно соединенных мостов. Если суммируется 4 напряжения, то напряжение U4 делится на 4 части, если суммируется 5, то U5 делится на 8, если 6, то на 16 и далее по такому подобию. Выходное напряжение, снимаемое с последнего моста, определится следующим выражением
С помощью мостовых схем можно суммировать лишь те сигналы, которые не имеют между собой гальванических связей. 3. Суммирование с помощью магнитных усилителей. W1, W2,…, Wn, – обмотки управления; Wр – рабочая обмотка; Wос – обмотка обр-й связи; В – выпрямитель; МУ – магнитный усилитель. При помощи данной схемы суммируются и вычитаются сигналы. Рабочая обмотка питается переменным током, а управляющие постоянным. Для суммирования сигналов используются управляющие обмотки усилителя, причем их количество равно числу слагаемых. Если управляющие обмотки и обмотка ОС отличаются одна от другой, то возникающие в МУ магнитодвижущие силы определяются следующей зависимостью
IWр = I1W1 + I2W2 +,…, + InWn -- IосWос.
При Wр = W1 = W2 =,…, = Wn и IосWос = b = 1, сила тока рабочей обмотки
т.е. выходная сила тока усилителя равна сумме токов в управляющих обмотках. Аналогично можно получить для напряжения
4. Суммирование напряжений на операционных усилителях. Для суммирования электрических сигналов используются инвертирующие и неинвертирующие операционные усилители. Применяемые инвертирующие ОУ, как правило, имеют на выходе сглаживающие фильтры. Представленная схема ОУ используется в некоторых автоматических регуляторах (Р25, Р27 и др.)
Zi – операционные сопротивления; «ф» - фильтр; «ос» - обратная связь. При относительно высоком коэффициенте усиления k и zосk >> Rф будет справедливо следующее выражение
Внутреннее сопротивление в данных усилителях и вид нагрузки не влияют на точность измерения, что является их достоинством.
Усилительные устройства Усилительные устройства – это такие преобразовательные устройства, которые позволяют малым на входе сигналом управлять значительным сигналом по мощности на их выходе. Электрические усилители предназначены как для управления электродвигателями, так и для увеличения коэффициента усиления (преобразования) в замкнутых системах управления в целях улучшения их качественных показателей. Данные устройства подразделяются на три группы: электромашинные, магнитные и электронные. Основные требования к усилительным устройствам: – высокий коэффициент усиления; – плавность изменения выходной величины; – отсутствие гистерезисных явлений; – малая инерционность; – бесконтактность; – высокая надежность и долговечность; – стабильность характеристик (статических, динамических) при изменении напряжения, частоты, температуры; – малая металлоемкость; – простота конструкции.
Электромашинные усилители
Данные устройства относятся к вращающимся усилителям, представляющим собой электрические генераторы постоянного тока. Они подразделяются - на обычные электромашинные (генераторы постоянного тока) и специальные электромашинные с поперечным полем (ЭМУ). Первые не используются из-за низкого коэффициента усиления. Нашли применение устройства поперечного поля. У них на коллекторе имеются две пары щеток, которые замкнуты накоротко. В индукторе ЭМУ имеются 2 или 4 обмотки управления. Если через обмотку управления ОУ1 пропустить ток, то намагничивающая сила от магнитного потока Ф1 при вращении машины с постоянной скоростью будет наводить ЭДС на щетках 1-1. Т.к. они замкнуты накоротко, то в якоре потечет ток силой I2, который в свою очередь создает намагничивающую силу и поток Ф2. Поскольку сопротивление обмотки 1-1 мало то уже малый Ф1 вызовет возникновение большого магнитного потока Ф2. Этот поток является неподвижным в пространстве, в нем вращается якорь ЭМУ, создавая ЭДС на щетках 2-2. При подключении к щеткам нагрузки по внешней цепи потечет ток силой I3,
|
|||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-08-15; просмотров: 490; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.41 (0.018 с.) |







 Человек + емкость – система ручного регулирования:
Человек + емкость – система ручного регулирования:



 xвх xзвых
xвх xзвых


 к)
к)

 Исполнительное
Исполнительное 











 устройство
устройство




 Термопара – преобразователь;
Термопара – преобразователь;
 Датчик давления – преобразователь;
Датчик давления – преобразователь;
 ;
; При х.х., когда Iн = 0 при Rн ® µ выходное напряжение определится следующим образом
При х.х., когда Iн = 0 при Rн ® µ выходное напряжение определится следующим образом



 /
/  ,
, т.е. подключение нагрузки приводит к нелинейности.
т.е. подключение нагрузки приводит к нелинейности. При конструировании этого типа датчиков чаще всего применяют схемы соединения с выведенной средней точкой.
При конструировании этого типа датчиков чаще всего применяют схемы соединения с выведенной средней точкой. (1)
(1)
 Применяются при перемещениях менее 1 мм.
Применяются при перемещениях менее 1 мм.
 1 – стальной магнитопровод;
1 – стальной магнитопровод;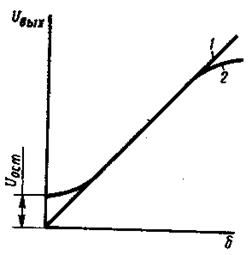 Т.е. индуктивность является обратно-пропорциональной зависимостью L = f(1/d).
Т.е. индуктивность является обратно-пропорциональной зависимостью L = f(1/d). 3) не реагирует на изменение знака сигнала.
3) не реагирует на изменение знака сигнала.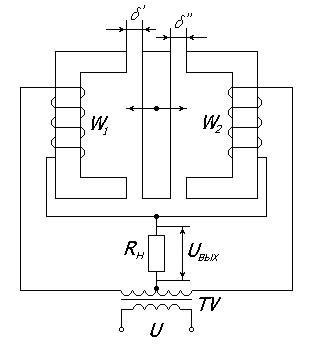 Представляет собой два одноконтактных датчика с общим якорем.
Представляет собой два одноконтактных датчика с общим якорем. 1) Индикаторный - применяется для контроля и дистанционной передачи угла поворота (в тех случаях когда не требуется значительного вращающего момента).
1) Индикаторный - применяется для контроля и дистанционной передачи угла поворота (в тех случаях когда не требуется значительного вращающего момента).
 ВТ – сельсин-трансформатор
ВТ – сельсин-трансформатор Зависимость Uвых = f(q) является статической характеристикой сельсинов в трансформаторном режиме.
Зависимость Uвых = f(q) является статической характеристикой сельсинов в трансформаторном режиме. При подаче переменного напряжения на одну из обмоток статора в роторе наводится пульсирующий магнитный поток, под действием которого в обмотках ротора возникает переменная ЭДС. При повороте ротора на угол q относительно нейтрали появляются напряжения Uвых1 и Uвых2.
При подаче переменного напряжения на одну из обмоток статора в роторе наводится пульсирующий магнитный поток, под действием которого в обмотках ротора возникает переменная ЭДС. При повороте ротора на угол q относительно нейтрали появляются напряжения Uвых1 и Uвых2.
 (3).
(3).
 Статическая характеристика в данном случае линейна (кривая 1 - теоретическая). При нагрузке характеристика становится нелинейной (кривая 2), что является следствием влияния якоря. В реальных GT возникает падение напряжения на щетках коллектора, что приводит к появлению зоны нечувствительности ЗН (кривая 3). Для уменьшения искажения статических характеристик, GT используют при небольших нагрузках (Iн = 0,01 ¸0,02 А).
Статическая характеристика в данном случае линейна (кривая 1 - теоретическая). При нагрузке характеристика становится нелинейной (кривая 2), что является следствием влияния якоря. В реальных GT возникает падение напряжения на щетках коллектора, что приводит к появлению зоны нечувствительности ЗН (кривая 3). Для уменьшения искажения статических характеристик, GT используют при небольших нагрузках (Iн = 0,01 ¸0,02 А). Достоинствами данных датчиков являются хорошая линейность характеристик, малая инерционность (высокая точность), малые габариты и масса, а у магнитоэлектрических еще и отсутствие питания.
Достоинствами данных датчиков являются хорошая линейность характеристик, малая инерционность (высокая точность), малые габариты и масса, а у магнитоэлектрических еще и отсутствие питания. 2) Асинхронные GT – это двухфазные машины с полым немагнитным ротором.
2) Асинхронные GT – это двухфазные машины с полым немагнитным ротором. 1) ТМ постоянного тока представляют собой специальную мостовую схему, в одно из плеч которой включен якорь двигателя Rя, а в остальные резисторы R1, R2, Rп.
1) ТМ постоянного тока представляют собой специальную мостовую схему, в одно из плеч которой включен якорь двигателя Rя, а в остальные резисторы R1, R2, Rп.
 Еi – ЭДС источника тока;
Еi – ЭДС источника тока; ;
;  .
. <<
<<  , то выражение в знаменателе будет равно 1. Следовательно
, то выражение в знаменателе будет равно 1. Следовательно .
.
 .
. предыдущее выражение принимает вид
предыдущее выражение принимает вид .
. А. Суммирование двух напряжений.
А. Суммирование двух напряжений. ,
,  .
. . При R1 и R2 получим
. При R1 и R2 получим  .
. Б. Суммирование трех напряжений.
Б. Суммирование трех напряжений. .
. .
. Из этого выражения видно, что коэффициент усиления мостовых схем меньше 1 и уменьшается с ростом числа суммирующих сигналов.
Из этого выражения видно, что коэффициент усиления мостовых схем меньше 1 и уменьшается с ростом числа суммирующих сигналов. ,
, .
.
 .
.


