Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Регуляторы и регулирующие устройстваСодержание книги Поиск на нашем сайте
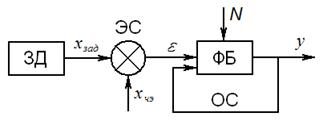
Регулирующие блоки (устройства) предназначены для сравнения текущего значения регулируемой величины с заданным и при наличии рассогласования выработки управляющего воздействия с целью его устранения.
ЗД – задатчик; ЭС – элемент сравнения; ОС – обратная связь; хзад – заданное значение регулируемой величины; хд – текущее значение регулируемой величины; e = хзад – хд – рассогласование; у – управляющее воздействие; N – вспомогательная энергия.
Классификация регуляторов: 1). По принадлежности к ветви ГСП: электрические, пневматические, гидравлические. 2) По использованию вспомогательной энергии: а) без использования вспомогательной энергии – регуляторы прямого действия (регуляторы «до» или «после себя»); для выработки управляющего воздействия используют энергию регулируемой среды (давление, перемещение?); б) с использованием вспомогательной энергии (косвенного действия?) – регуляторы с усилением, формирующие сигнал на выходе за счет дополнительного источника энергии. 3) По характеру выработки регулирующего воздействия: а) прерывистые (дискретного действия); Прерывистые – у которых, при непрерывном изменении регулирующего параметра, РО перемещается только при достижении этим параметром определенного значения Делятся на релейные и импульсные. У первых сигнал изменяется скачком и имеет на выходе только два значения: максимальное и минимальное (позиционные регуляторы). У вторых - выходной сигнал принимает последовательность импульсов во времени. б) непрерывные. Непрерывные – РО которых при непрерывном изменении регулирующего параметра перемещается постоянно. 4) По характеру изменения управляющего воздействия (по виду характеристики действия): а) нелинейные (позиционные регуляторы); б) линейные, которые разделяются по законам регулирования Закон регулирования – математическая зависимость (функция) между значением выходного параметра ИУ (или перемещением выходного звена ИМ, т.е. перемещением РО) и отклонением регулируемой величины. (Упрощенно – зависимость между входным и выходным сигналами регулятора без учета его инерционности.) 5) По наличию обратной связи: а) без обратной связи; б) с обратной связью. 6) По виду регулирующего параметра: (регуляторы температуры, давления расхода, уровня и т.д.)
Основные унифицированные системы регуляторов.
ПГ «Метран» – промышленная группа предприятий «Метран». Регуляторы температуры РТ (в локальных системах регулирования, двухпозиционное контактное, импульсное ПД и ПИД законы). Измерители-регуляторы технологические ИРТ-5300 (двух- и трехпозиционное контактное, П закон). Измерители-регуляторы технологические ИРТ 1730 (микропроцессорные, программируемые, двухпозиционное контактное). Технологические многоканальные измерители серии ТМ5200 (двух- и трехпозиционное контактное). Термометры многоканальные ТМ5101 (микропроцессорные, двухпозиционное контактное и др. параметры). Измерители-регуляторы температуры и влажности ИРТВ-5215 (трехпозиционное контактное). Измеритель-регулятор технологический ИРТ-5900 (микропроцессорные, программируемые, двухпозиционное контактное). Российская производственная компания «ПО ОВЕН» Измерители-регуляторы температуры: ТРМ2 – П-закон (2-х канальный); ТРМ10 – ПИД-закон с дополнительным реле; ТРМ138 – универсальный измеритель регулятор (8-ми канальный). ТРМ501 – реле регулятор с таймером. МПР51-Щ4 – регулятор температуры и влажности, программируемый по времени. ТРМ151 – универсальный двухканальный программный ПИД-регулятор.
Позиционные регуляторы.
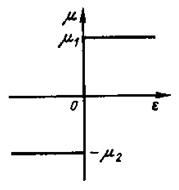
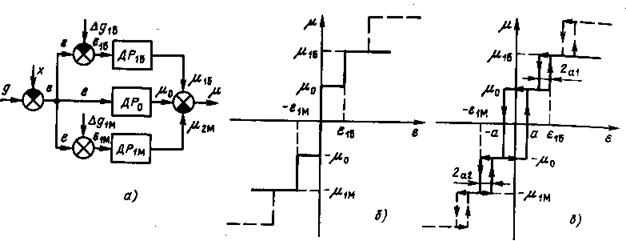
Работают по принципу «вкл. – выкл.».Непрерывному изменению входной величины в них соответствует скачкообразное изменение выходного сигнала. Их реализация осуществляется с помощью контактных и бесконтактных релейных элементов. Бывают двухпозиционные, трехпозиционные и реже многопозиционные регуляторы. Рассмотрим статические характеристики этих регуляторов.
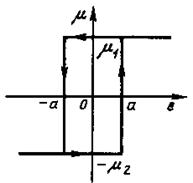
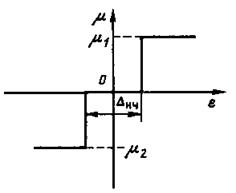
а) без зоны неодназначности б) с зоной неодназначности Двухпозиционные регуляторы настраиваются таким образом, чтобы значения y и e отсчитывались в приращениях от условного равновесного состояния объекта регулирования, соответствующего расчетным значениям yо и eо, принятым за начало отсчета. Аналитически статические характеристики можно записать следующим образом: а) y = ymax при e > 0 б) y = ymax при e ³ d; y = - ymax при e < 0 при - d < e < d и de/dt < 0 y = - ymax при e £ -d; при - d < e < d и de/dt > 0. Из этих выражений и рисунков видно, что двухпозиционные регуляторы постоянно оказывают на объект регулирования воздействия отличные от значений необходимых для равновесного состояния системы (когда e = 0). В результате АСР с таким регулятором будет работать в автоколебательном режиме и ее переходный процесс будет колебательным в окрестностях ее равновесного состояния. Настраиваемая зона неоднозначности в них называется зоной возврата. Статические характеристики трехпозиционных регуляторов выглядят следующим образом: а) без зоны неодназначности б) с зоной неодназначности
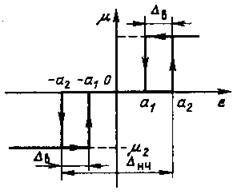
Dнч - зона нечуствительности. Здесь имеется устойчивое нейтральное положение. Аналитически статические характеристики выглядят следующим образом: а) y = ymax при e ³ d б) y = ymax при e ³ d2 при d1 < e < d2 и y = 0 при - d < e < d y = 0 при - d1 < e < d2 и при - d2 < e < d1 и y = - ymax при e £ -d y = - ymax при e £ -d2 при - d2 < e <- d1 и Из этих выражений и рисунков следует, что трехпозиционные регуляторы имеют устойчивое состояние (y = 0) в окрестностях равновесного состояния системы (когда e = 0), определяемых зоной нечувствительности и зоной неоднозначности. Если при очередном переключении регулятора в состояние y = 0, отклонение регулируемой величины не будет выходить за зону нечувствительности регулятора, то в этом состоянии система регулирования может оставаться бесконечно долго. В системе не будет автоколебательных процессов (не подгорают контакты, увеличивается срок службы). Позиционными эти регуляторы называются потому, что регулирующий орган занимает в двухпозиционных регуляторах два положения (позиции) – открыто – закрыто, а в трехпозиционных три положения: открыто, закрыто и промежуточное. Многопозиционный регулятор можно представить как несколько двух позиционных регуляторов с разными уставками их срабатывания и соединенных последовательно. Статическая характеристика будет выглядеть следующим образом:
Позиционные регуляторы несложны по конструкции, надежны в работе, просты в обслуживании и настройке. Их применяют на объектах с малым инерционным запаздыванием. Часто встраивают во вторичные приборы. Настроечные параметры: зона возврата и зона нечувствительности.
|
||
|
|
Последнее изменение этой страницы: 2016-08-15; просмотров: 709; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.102 (0.008 с.) |

 Структурная схема двухпозиционного регулятора
Структурная схема двухпозиционного регулятора