
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Понятие о приводе. Кинематические пары, цепи, схемыСодержание книги
Поиск на нашем сайте
2.2.1.2 К числу устройств привода, необходимых для обеспечения передачи движения от его начального звена к конечному, относятся собственно передачи (они могут быть ременными, зубчатыми, цепными, винтовыми, фрикционными, гидравлическими и др.), а также валы и их опоры, муфты и пр.
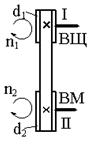
В ременных передачах движение от ведущего шкива к ведомому может передаваться плоским ремнём, одним или несколькими клиновыми, поликлиновым, зубчатым, круглым. Ременные передачи часто применяются в станках для соединения электродвигателя с входным валом станка, а также в качестве шпиндельной передачи для обеспечения высоких частот вращения шпинделя и безвибрационной работы станка. Используемые в станках зубчатые передачи могут быть цилиндрическими с прямыми, винтовыми (косыми) и шевронными зубьями; коническими; червячными; реечными. Кинематическая пара, передающая вращательное движение, характеризуется передаточным отношением. Если, к примеру, частоты вращения I (ведущего – ВЩ) и II (ведомого – ВМ) валов цилиндрической или конической зубчатой передачи (рис. У.2.) равны n1 и n2 об/мин, а числа зубьев шестерён[2] – Z1 и Z2, соответственно, то передаточное отношение i пары и частота вращения ведомого вала будут равны:
Для червячной передачи (рис. У.2,в), червяк которой имеет K заходов, а червячное колесо – Z зубьев:
В ременных передачах (рис. У.2,г) кроме ремённозубчатых имеет место проскальзывание и это учитывают соответствующим коэффициентом (hр[3]):
где d1 и d2 – рабочие диаметры шкивов; hр = 1–e и e» 0,02 – относительное скольжение ремня.
а) б) в) г)
Рис. У.2. Кинематические пары для передачи вращательного движения: а, б, в – зубчатые цилиндрическая, коническая, червячная; г – ременная
Передачи, преобразующие вращательное движение в прямолинейное, характеризуются величиной перемещения поступательно движущегося элемента за один оборот приводного вала. Для таких передач часто увязывают скорость прямолинейного перемещения ведомого звена (v, S) с частотой вращения (n) ведущего. Эта зависимость будет: - для винтовой передачи с однозаходным винтом (рис. У.3,а) – S = t×n, с многозаходным винтом – S = Н×n= K×t×n, где t и Н – шаг и ход винта; K – число его заходов; - для зубчато-реечной и червячно-реечной передач (рис. У.3,б,в), соответственно, S = t×Z×n = p×m×Z×n и S = t×K×n = p×m×K×n, где t и m – шаг и модуль зацепления; Z – число зубьев реечного колеса; K – число заходов червяка.
а) б) в)
Рис. У.3. Кинематические пары для преобразования вращательного движения в поступательное: а – винтовая; б – зубчато-реечная; в – червячно-реечная
Вращательное движение преобразуется в прямолинейное также с помощью других передач и ряда механизмов (кривошипно-шатунных, кривошипно-кулисных, кулачковых и др.).
2.2.1.3 Совокупность передач привода определяет движение рабочих органов, т.е. кинематику их, и её называют кинематической цепью. В кинематические цепи могут входить как отдельные передачи, так и группы передач (групповые передачи). Произвольный пример кинематической цепи, состоящей из клиноременной, четырёх зубчатых и цепной передач, приведён на рис. У.4.
Рис. У.4. Пример кинематической цепи
Полное передаточное отношение кинематической цепи равно произведению передаточных отношений всех кинематических пар, составляющих цепь. Полное передаточное отношение I кинематической цепи, показанной в качестве примера на рис. У.4, будет равно:
здесь Z8 и Z9 – числа зубьев звёздочек цепной передачи.
Направление передачи движения записывается в виде т.н. расчётного перемещения или расчётных перемещенийконечных звеньев. Так, если nо и n – частоты вращения ведущего и ведомого валов или начального и конечного звеньев кинематической цепи, то расчётное перемещение представляют в виде: nо®n. А если nо и S – частота вращения ведущего вала кинематической цепи и скорость перемещения ведомого звена – гайки винтовой передачи шага t, то расчётное перемещение будет: nо®S(подробнее см. п. 3.2). Очевидно, в первом случае – n = nо×I, а во втором – S = nо×I×t.
То или иное из этих или им подобных выражений с подробно расписанной правой частью (т.е. вместо I – произведение передаточных отношений всех кинематических пар, составляющих цепь, в виде обозначений шестерён, шкивов или конкретных чисел зубьев шестерён, диаметров шкивов, в последнем случае – и конкретных значений частот вращения, шагов резьб и т.д.) называют уравнением кинематического баланса. Для приведённой выше кинематической цепи уравнение кинематического баланса в общем виде и в предположительно возможном числовом будет:
Уравнение кинематического баланса позволяет определить перемещение конечного звена в зависимости от перемещения начального звена и полного передаточного отношения кинематической цепи, связывающей эти звенья, а при наличии передач, преобразующие вращательное движение в прямолинейное – и их параметров. 2.2.1.4 Условное изображение кинематических цепей всех механизмов станка называют кинематической схемой данного станка. Кинематические схемы могут быть пространственными и плоскими; первые более наглядны, вторые – проще в исполнении и потому встречаются чаще. Повышение наглядности плоских схем может быть достигнуто при продуманном их исполнении. Кинематическую схему следует вписывать в габариты или контуры важнейшей проекции станка, сохраняя, по возможности, относительное расположение его отдельных механизмов. Главная цель кинематической схемы – создание ясного представления о кинематике станка. Этой цели подчинено всё остальное, поэтому при вычерчивании плоской схемы допускаются такие условности, которые, способствуя уяснению кинематики станка, не вполне согласуются с реальной конструкцией его. К примеру, вал, изображаемый обычно прямой линией, может быть показан изогнутым. Допускается полуконструктивное изображение отдельных элементов и частей приводов и узлов станка. Такие подходы проявлены при выполнении кинематических схем данного пособия. Кинематические схемы станков, несмотря на ряд упрощений и условностей при изображении их, дают простое и наглядное представление не только о кинематике станков, но в некоторой степени и об их конструкции. При соблюдении определённых правил и при внимательном отношении к составлению кинематической схемы она может быть понятна почти без всяких дополнительных пояснений, если известен принцип работы станка.
|
||||
|
|
Последнее изменение этой страницы: 2016-08-10; просмотров: 408; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.135.201.101 (0.006 с.) |

 и
и  .
. и
и  .
. и
и  ,
,




 ,
, и
и 



