
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Базовые детали и направляющиеСтр 1 из 10Следующая ⇒
Фрагменты из источников Иноземцев А.Н. Металлорежущие станки: учеб. пособие / А.Н. Иноземцев, Г.В. Сундуков, Г.В. Шадский. -Тула: Тул. гос. ун-т, 2002. -183 с. Иноземцев А.Н. Иллюстрационно-дидактические материалы: прил. к учеб. пособию "Металлорежущие станки" / А.Н. Иноземцев, Г.В. Сундуков, Г.В. Шадский; Тул. гос. ун-т. -Тула, 2002. -97 с. _________________________________________________________________________________________
2 Основные узлы и механизмы станков
Базовые детали и направляющие
Назначение базовых деталей и направляющих
Базовые детали металлорежущих станков служат для создания требуемого пространственного размещения узлов, несущих инструмент и обрабатываемую деталь, и обеспечивают точность их взаимного расположения под нагрузкой. К базовым деталям относят станины, основания, колонны, стойки, поперечины, ползуны, траверсы, столы, каретки, суппорты, планшайбы, корпуса шпиндельных бабок и т.п. Направляющие обеспечивают правильность траектории движения заготовки и (или) инструмента, точность перестановки узлов и восприятие внешних сил. Во многих случаях направляющие выполняют как одно целое с базовыми деталями. Базовые детали и направляющие должны иметь: - первоначальную точность изготовления всех ответственных поверхностей для обеспечения требуемой геометрической точности станка; - высокую жёсткость, определяемую контактными деформациями подвижных и неподвижных стыков, местными деформациями и деформациями самих базовых деталей; - высокие демпфирующие свойства, т.е. способность гасить колебания между инструментом и заготовкой от действия различных источников вибраций; - долговечность, которая выражается в стабильности формы базовых деталей и способности направляющих сохранять первоначальную точность в течение заданного срока эксплуатации. Кроме того, базовые детали должны иметь малые температурные деформации, из-за которых могут произойти относительные смещения между инструментом и заготовкой, а направляющие должны обладать малой величиной и постоянством сил трения, так как от этого зависит точность позиционирования узлов станка. Перечисленные основные требования, предъявляемые к базовым деталям и направляющим станков, могут быть удовлетворены при правильном выборе материала и реализации при конструировании общих принципов, независимых от многообразия форм деталей.
Конструирование базовых деталей – это поиск компромиссного решения между противоречивыми требованиями при создании конструкций: - жёстких, но имеющих малую массу; - простых по конфигурации, но обеспечивающих высокую точность; - дающих экономию металла, но учитывающих возможности литейной технологии при проектировании литых конструкций и возможности технологии сварных конструкций.
Виды базовых деталей
Основные неподвижные и подвижные узлы станка монтируются и устанавливаются на станине. Станины бывают в зависимости от расположения оси станка горизонтальными и вертикальными. Они имеют, как правило, коробчатую форму с внутренними рёбрами жёсткости и перегородками. Форма поперечного сечения горизонтальных станин определяется требованиями жёсткости, расположением направляющих, условиями удаления стружки и охлаждающей жидкости, размещением в станинах различных механизмов, агрегатов и резервуаров для масла и охлаждающей жидкости. Внутренние полости между стенками часто делают замкнутыми и оставляют в них стержневую смесь. Замкнутый профиль имеет более высокую жёсткость (особенно на кручение), чем разомкнутый, а сыпучий материал во внутренней полости повышает демпфирующие свойства станины. Форма сечений вертикальных станин (стоек) зависит от действующих на них сил. У большинства станков момент сил, действующих на стойку у основания, больше, чем момент сил, действующих сверху, поэтому стойки выполняют расширяющимися книзу хотя бы в одной плоскости. В станках с вертикальными станинами для повышения их устойчивости и в станках с неподвижной заготовкой для уменьшения их массы и габаритов (станки радиально-сверлильные, консольно-фрезерные, вертикально-сверлильные, тяжелые расточные и др.) применяют плиты. Конструктивно плиты выполняют в виде пластины с системой стенок и рёбер или двух пластин, скрепленных стенками и рёбрами. Высота плит не должна быть меньше 1/10 длины плиты.
шпиндельные бабки, коробки скоростей и подач, фартуки и т.п. служат для размещения передач приводов. чаще они имеют форму параллелепипеда, реже – цилиндра (многошпиндельные токарные автоматы). Жёсткость таких деталей увеличивают за счёт увеличения жёсткости стенок непосредственно в месте приложения нагрузки путём выполнения бобышек и рёбер. Диаметр бобышки обычно принимается не более 1,4-1,6 диаметра отверстия, а её высота – до 2,5-3 толщин стенки.
Отверстия в стенках снижают жёсткость коробок пропорционально соотношению площадей отверстия и стенки. Базовые детали типа суппортов и салазок (кареток) предназначены для перемещения инструмента или заготовки и имеют обычно две системы направляющих. Конструктивные формы суппортов и салазок определяются формой и расположением направляющих, конструкцией регулирующих элементов и механизмов привода, требованиями к размерам по высоте. При конструировании салазок и суппортов учитывают противоречивые требования: уменьшение массы и размеров по высоте, с одной стороны, и увеличение жёсткости, которое достигается увеличением высоты сечения салазок, с другой. Для поддержания заготовок при обработке служат столы. их делят на подвижные (консольно-фрезерные, расточные, поперечно-строгальные станки и др.) и неподвижные (радиально-сверлильные, протяжные и другие станки). Подвижные столы предназначены для поддержания и перемещения заготовок и имеют одну систему направляющих, т.е. перемещаются в одном направлении. Столы обычно имеют коробчатую форму с внутренними перегородками и ребрами, повышающими их жёсткость. Фрезерные, шлифовальные и другие станки имеют подвижные столы плоской прямоугольной формы. Их жёсткость определяется главным образом высотой. В продольно-фрезерных станках отношение высоты стола к ширине, равное 0,14-0,16, считается оптимальным. Подвижные столы круглой формы имеют токарно-карусельные, зуборезные и другие станки. Круглые столы (планшайбы) карусельных станков диаметром более 1000 мм выполняют коробчатыми с радиальными и кольцевыми ребрами. В большинстве конструкций базовых деталей (в частности, станин) в стенках предусматривают технологические окна и вырезы. Иногда они нужны для размещения внутри них каких-либо вспомогательных устройств (элементов систем смазки и охлаждения, противовесов). В некоторых станках стружка отводится через окна в задней стенке станины. Окна и вырезы сильно снижают жёсткость базовых деталей, особенно крутильную жёсткость. Для частичной компенсации потери жёсткости используют дополнительные рёбра и перегородки. Реже встречаются местные утолщения и приливы, так как по литейным соображениям следует стремиться к равной толщине стенок всей конструкции. Толщина стенок литых станин и других корпусных деталей принимается от 4-5 мм в лёгких станках до 16-20 – в тяжёлых.
Исполнения направляющих
В металлорежущих станках применяют направляющие скольжения, качения и комбинированные. Направляющие скольжения по характеру трения делятся на направляющие полужидкостного трения, жидкостного трения и аэростатические. Полужидкостное трение имеет место на смазанных направляющих, когда смазка не разделяет полностью контактирующие поверхности. Если смазочный материал разделяет поверхности полностью, трение является жидкостным. Это имеет место в гидростатических и гидродинамических направляющих. В аэростатических направляющих сопряженные поверхности разделяются слоем сжатого воздуха.
Направляющие качения разделяют по виду тел качения на шариковые и роликовые. Все типы направляющих имеют свои достоинства и недостатки, что и определяет их целесообразную область применения. Часто делают комбинированные направляющие, используя достоинства разных типов и достигая тем самым суммарного эффекта. В зависимости от траектории движения подвижного узла различают направляющие прямолинейные и круговые. Их делят также на горизонтальные, вертикальные и наклонные. Формы поперечного сечения направляющих весьма разнообразны. Наиболее распространены прямоугольные (плоские), треугольные (призматические), трапециевидные (типа ласточкина хвоста) и круглые (цилиндрические) направляющие. Часто используют сочетание различных форм, например, одна из направляющих выполняется прямоугольной, а другая треугольной. Направляющие на одной из двух сопряжённых деталей являются охватывающими, а на другой – охватываемыми. Охватываемые направляющие плохо удерживают смазочный материал, а охватывающие удерживают его хорошо, но нуждаются в надёжной защите от загрязнений. Прямоугольные направляющие отличаются технологичностью изготовления и простотой контроля геометрической точности. Они способны воспринимать большие нагрузки и позволяют достаточно просто регулировать зазоры. В этой связи они находят всё большее применение, особенно в станках с программным управлением. Треугольные направляющие обладают свойством автоматического выбора зазоров под действием собственного веса, но угловое расположение рабочих граней усложняет их изготовление и контроль. Трапециевидные направляющие отличаются компактностью конструкции, но сложны в изготовлении и контроле. Регулирование зазора у них относительно простое, но не обеспечивает высокой точности сопряжения. Круглые направляющие применяют редко. В охватываемом варианте они не обеспечивают большой жёсткости из-за прогиба скалок (штанг), закреплённых на концах, поэтому применяют их в основном при малой длине хода перемещаемого по ним узла. В охватывающем варианте у таких направляющих сложно изготовить полукруглые пазы.
Размеры и формы сечений направляющих трения скольжения устанавливаются стандартами, а также нормалями станкостроения. Длину направляющих подвижного узла увязывают с общей шириной направляющих (ширина самих направляющих и расстояние между ними) и принимают её в 1,5-2 больше общей ширины. Направляющие могут быть выполнены как одно целое с базовой деталью либо быть накладными. Накладные направляющие крепят к базовой детали по всей их длине. При креплении винтами шаг между ними во избежание искривления и коробления должен быть не больше двукратной высоты накладной планки. При механическом креплении или приклеивании накладных направляющих необходимо предусматривать фиксацию их в поперечном направлении различными центрирующими выступами, поверхностями, фасками. Направляющие необходимо защищать от попадания на рабочие поверхности грязи, мелкой стружки и абразивной пыли. Для этого используются неподвижные и телескопические щитки, защитные ленты, гармоникообразные меха и другие устройства.
Направляющие скольжения
Характер трения определяет область рационального использования тех или иных направляющих скольжения в станках. Направляющие полужидкостного трения характеризуются высокой контактной жёсткостью и хорошими демпфирующими свойствами. Кроме того, они обеспечивают надёжную фиксацию подвижного узла станка после его перемещения в заданную позицию. Однако непосредственный контакт сопряженных поверхностей в направляющих полужидкостного трения определяет непостоянство и большую величину сил сопротивления. В зависимости от нагрузки, скорости, вида смазочного материала и его количества направляющие могут работать в режиме сухого, граничного и полужидкостного трения. Существенную разницу для этих направляющих составляют силы трения покоя (силы трогания) по сравнению с силами трения движения; последние, в свою очередь, сильно зависят от скорости скольжения. Эта разница приводит к скачкообразному движению узлов при малых скоростях, что крайне нежелательно, особенно для станков с программным управлением. Значительное трение вызывает износ и, следовательно, снижает долговечность направляющих. Для уменьшения недостатков направляющих полужидкостного трения используют специальные антискачковые масла, применяют накладки из антифрикционных материалов. Если коэффициент трения покоя в паре чугун-чугун при обычных маслах равен 0,21-0,28, то применение антискачкового масла снижает его до 0,075-0,09. Применение накладок из полимерных материалов на основе фторопласта снижает коэффициент трения покоя до 0,04-0,06. Материал направляющих в значительной мере определяет износостойкость и плавность движения узлов. Во избежание крайне нежелательного явления – схватывания[1], пару трения комплектуют из разнородных материалов, имеющих различные состав, структуру и твёрдость. Направляющие, по которым перемещаются подвижные узлы, делают более твёрдыми и износостойкими. Этим обеспечивается длительное сохранение точности, так как при движении копируется форма неподвижных направляющих.
Направляющие из серого чугуна, выполненные как одно целое с базовой деталью, наиболее просты и дешевы, но при интенсивной работе не обеспечивают необходимой долговечности. Их износостойкость повышают закалкой с нагревом токами высокой частоты или газопламенным методом. Закалкой одной из сопряженных поверхностей до HRC 48-53 можно повысить износостойкость более чем в 2 раза. Легирующие присадки к чугунным направляющим дают повышение износостойкости только при последующей закалке до высокой твёрдости. Значительного повышения износостойкости чугунных направляющих можно добиться применением специальных покрытий. Хромирование направляющих слоем толщиной 25-50 мкм обеспечивает твёрдость до HRC 68-72, в 4-5 раз повышает износостойкость и существенно уменьшает коэффициенты трения покоя и трения движения. Аналогичный эффект даёт напыление направляющих слоем молибдена или сплавами с содержанием хрома. Хромируют только одну из сопряженных поверхностей, обычно неподвижную, так как пара хром по хрому склонна к схватыванию, хотя и имеет минимальный коэффициент трения. Направляющие из стали выполняют в виде отдельных планок, которые приваривают к сварным станинам, а к чугунным станинам крепят винтами или приклеивают. Материал накладных направляющих – низкоуглеродистые стали 20, 20Х, 20ХНМ, 18ХГТ с цементацией и закалкой до высокой твёрдости (HRC 60-65), азотируемые стали 38ХМЮА, 40ХФ, 3ОХН2МА с глубиной азотирования 0,5 мм и закалкой до очень высокой твёрдости (HV 800-1000). Реже применяют легированные высокоуглеродистые стали ШХ15, ХВГ, 9ХС с объёмной закалкой и отпуском (HRC 58-62). Стальные закалённые направляющие обеспечивают наивысшую износостойкость в паре с закалённым чугуном. Наилучшие результаты по износостойкости, отсутствию задиров и равномерности подачи обеспечивают цветные сплавы, такие, как алюминиевая бронза Бр.АМц9-2, оловянистая бронза Бр.ОФ10-1, сплав на цинковой основе ЦАМ10-5 в паре со сталью или чугуном, но высокая стоимость сплавов сдерживает их широкое применение при изготовлении направляющих. Их используют главным образом при изготовлении накладных направляющих для тяжёлых станков. Обладают хорошими характеристиками трения и антизадирными свойствами пластмассы. Они обеспечивают равномерность движения при малых скоростях и не дают схватывания, однако низкая износостойкость при абразивном загрязнении, влияние тепловых воздействий, влаги, масла, слабых щелочей и кислот ограничивают их применение. Используют пластмассы в основном в комбинированных направляющих, когда основную нагрузку несут, например, роликовые опоры, а слой пластмассы на вспомогательных гранях обеспечивает необходимые характеристики трения. Из пластмасс в станках используют фторопласт (в виде ленты, наклеиваемой на направляющие), фторопласт с бронзовым наполнителем, композиционные материалы на основе эпоксидных смол с присадками дисульфида молибдена, графита и неметаллических наполнителей, материалы на основе ацетатных смол. Для обеспечения износостойкости направляющих ограничивают допустимые давления на их рабочих гранях. Рекомендуемые максимальные давления на направляющих при малых скоростях равны 2,5-3,0 МПа; при больших скоростях – не более 1,0-1,2 МПа. Средние давления должны быть вдвое меньше максимальных. В прецизионных и тяжёлых станках средние давления не должны превышать 0,1-0,2 МПа. Жидкостное трение между направляющими можно обеспечить за счёт гидродинамического эффекта либо подачей смазочного материала между трущимися поверхностями под давлением. Достоинство жидкостного трения в том, что отсутствует износ направляющих, обеспечиваются высокие демпфирующие свойства и плавность движения. Гидродинамические направляющие хорошо работают лишь при достаточно больших скоростях скольжения, которым соответствуют скорости главного движения (в станках продольно-строгальных, карусельных). Гидродинамический эффект, т.е. эффект всплывания подвижного узла, создаётся пологими клиновыми скосами между смазочными канавками, выполненными на рабочей поверхности неподвижных направляющих перпендикулярно их длине. В образованные таким образом сужающиеся зазоры при движении затягивается смазочный материал, и обеспечивается разделение трущихся поверхностей слоем жидкости. Для различных скоростей движения и нагрузки существуют свои оптимальные геометрические параметры клинового скоса. Существенным недостатком гидродинамических направляющих является нарушение жидкостной смазки в периоды разгона и торможения подвижного узла, в результате имеет место износ поверхностей. Гидростатические направляющие более широко распространены в металлорежущих станках, чем гидродинамические. Они обеспечивают жидкостную смазку при любых скоростях скольжения, а значит, и равномерность, и высокую чувствительность точных исполнительных движений. Недостатком гидростатических направляющих является сложность системы смазки и необходимость в специальных устройствах для фиксации перемещаемого узла в заданной позиции. На направляющих подвижного узла параллельно их длине выполняют карманы (углубления), в которые под давлением подаётся масло. Вытекая наружу, масло приподнимает подвижной узел и создает масляную подушку по всей площади контакта. По характеру восприятия нагрузки гидростатические направляющие делятся на открытые и замкнутые. Открытые направляющие предназначены для восприятия прижимающих нагрузок, а замкнутые (закрытые) могут воспринимать, кроме того, и значительные опрокидывающие моменты. Гидростатические направляющие чувствительны к деформациям и погрешностям изготовления и монтажа, суммарная величина которых для сопряжённых деталей не должна превышать примерно одной трети минимальной расчётной толщины щели между деталями. Положительным свойством гидростатических опор является способность их в значительной мере усреднять исходные геометрические погрешности сопряженных поверхностей. Аэростатические направляющие конструктивно подобны гидростатическим. Разделение трущихся поверхностей в аэростатических направляющих обеспечивают подачей в карманы воздуха под давлением. Недостатки аэростатических направляющих, по сравнению с гидростатическими, заключаются в малой нагрузочной способности, невысоком демпфировании колебаний, так как вязкость воздуха на четыре порядка меньше вязкости масла, низкими динамическими характеристиками, склонностью к отказам из-за засорения магистралей и рабочего зазора. Преимущества аэростатических направляющих состоят в том, что они при движении обеспечивают низкий коэффициент трения, а при отключении подачи воздуха очень быстро создаётся контакт поверхностей с большим трением, обеспечивающим достаточную жёсткость фиксации узла станка в заданной позиции. Отпадает необходимость в фиксирующих устройствах, в которых нуждаются гидростатические направляющие. Аэростатические направляющие используют в прецизионных станках, в которых малы силы резания и необходимо точное позиционирование.
Направляющие качения
Направляющие качения обладают хорошими характеристиками трения, равномерностью и плавностью движения на малых скоростях, высокой точностью установочных перемещений при длительном сохранении точности; малым тепловыделением, простотой системы смазывания. Трение в направляющих качения практически не зависит от скорости движения. Недостатками направляющих качения по сравнению с направляющими скольжения являются высокие трудоёмкость изготовления и стоимость, низкое демпфирование колебаний, повышенная чувствительность к загрязнениям. Наибольшее распространение в металлорежущих станках имеют направляющие, в которых трение качения создаётся при свободном прокатывании тел качения (шариков или роликов) между движущимися поверхностями. В такой конструкции есть возможность разместить значительное число тел качения в зоне контакта и обеспечить необходимые жёсткость и точность движения. При большой длине хода используют направляющие с циркуляцией тел качения, которые свободно возвращаются на рабочую дорожку по каналу возврата. Материал и конструктивные формы направляющих качения сходны с направляющими скольжения. Однако для направляющих качения необходимы твёрдые и однородные рабочие поверхности. Чугун применяют сравнительно редко лишь при небольших нагрузках. В основном используют стальные закалённые направляющие.
Рис. У.4. Пример кинематической цепи
Полное передаточное отношение кинематической цепи равно произведению передаточных отношений всех кинематических пар, составляющих цепь. Полное передаточное отношение I кинематической цепи, показанной в качестве примера на рис. У.4, будет равно:
здесь Z8 и Z9 – числа зубьев звёздочек цепной передачи.
Направление передачи движения записывается в виде т.н. расчётного перемещения или расчётных перемещенийконечных звеньев. Так, если nо и n – частоты вращения ведущего и ведомого валов или начального и конечного звеньев кинематической цепи, то расчётное перемещение представляют в виде: nо®n. А если nо и S – частота вращения ведущего вала кинематической цепи и скорость перемещения ведомого звена – гайки винтовой передачи шага t, то расчётное перемещение будет: nо®S(подробнее см. п. 3.2). Очевидно, в первом случае – n = nо×I, а во втором – S = nо×I×t.
То или иное из этих или им подобных выражений с подробно расписанной правой частью (т.е. вместо I – произведение передаточных отношений всех кинематических пар, составляющих цепь, в виде обозначений шестерён, шкивов или конкретных чисел зубьев шестерён, диаметров шкивов, в последнем случае – и конкретных значений частот вращения, шагов резьб и т.д.) называют уравнением кинематического баланса. Для приведённой выше кинематической цепи уравнение кинематического баланса в общем виде и в предположительно возможном числовом будет:
Уравнение кинематического баланса позволяет определить перемещение конечного звена в зависимости от перемещения начального звена и полного передаточного отношения кинематической цепи, связывающей эти звенья, а при наличии передач, преобразующие вращательное движение в прямолинейное – и их параметров. 2.2.1.4 Условное изображение кинематических цепей всех механизмов станка называют кинематической схемой данного станка. Кинематические схемы могут быть пространственными и плоскими; первые более наглядны, вторые – проще в исполнении и потому встречаются чаще. Повышение наглядности плоских схем может быть достигнуто при продуманном их исполнении. Кинематическую схему следует вписывать в габариты или контуры важнейшей проекции станка, сохраняя, по возможности, относительное расположение его отдельных механизмов. Главная цель кинематической схемы – создание ясного представления о кинематике станка. Этой цели подчинено всё остальное, поэтому при вычерчивании плоской схемы допускаются такие условности, которые, способствуя уяснению кинематики станка, не вполне согласуются с реальной конструкцией его. К примеру, вал, изображаемый обычно прямой линией, может быть показан изогнутым. Допускается полуконструктивное изображение отдельных элементов и частей приводов и узлов станка. Такие подходы проявлены при выполнении кинематических схем данного пособия. Кинематические схемы станков, несмотря на ряд упрощений и условностей при изображении их, дают простое и наглядное представление не только о кинематике станков, но в некоторой степени и об их конструкции. При соблюдении определённых правил и при внимательном отношении к составлению кинематической схемы она может быть понятна почти без всяких дополнительных пояснений, если известен принцип работы станка.
Сменные зубчатые колёса
Сменные колёса обеспечивают максимальную простоту привода, но требуют значительного времени на их смену. Консольное расположение колёс и скользящая посадка их на валах не обеспечивают высокой жёсткости и точности центрирования. Сменные колёса применяют при окружных скоростях не более 8 м/с. Используются механизмы с одной парой колёс (т.н. парносменные колёса или однопарные гитары), с двумя парами (т.н. двухпарные гитары или, чаще, гитары сменных шестерён) и более (многопарные гитары). Со станками, имеющими гитары, поставляются наборы (комплекты) сменных шестерён. Сменные колёса принято обозначать прописными или строчными буквами латинского или русского алфавитов.
2.2.4.1 Парносменные колёса (рис. У.5) применяются в приводах главного движения, деления и других ряда автоматов, специальных и специализированных станков. Количество вариантов скоростей, обеспечиваемых механизмом, равно количеству колёс в комплекте, если все колёса разные, или на единицу меньше при наличии в комплекте двух одинаковых колёс. Если обозначить сменные колёса (т.е. их числа зубьев) механизма через а (на I валу) и б (на II валу), а колёса в прилагаемом к станку комплекте имеют числа зубьев Z1–Zn, то передаточное отношение механизма будет равно:
Очевидно:
Доска гитары (приклон) Рис. У.5. Парносменные колёса Рис. У.6. Гитара сменных шестерен
2.2.4.2 Гитары сменных шестерен (двухпарные гитары – рис. У.6) применяются обычно в приводах подач при необходимости обеспечения регулирования в широком диапазоне, с большим количеством вариантов и для обеспечения точного передаточного отношения. В гитарах имеется две пары шестерён и при этом первая шестерня (а) и последняя (г) располагаются на ведущем и ведомом валах, а две промежуточных (б, в) – на оси, закрепляемой в нужном положении на приклоне (или доске гитары), который тоже закрепляется в требуем (угловом относительно оси ведомого вала) положении для обеспечения зацепления колёс. Передаточное отношение механизма: Принимают: а+б ³ в+(15…24) (2.1) Аналогично: в+г ³ б+(15…24) (2.2) Выражения (2.1) и (2.2) называют условиями сцепляемости. Подобранные сменные колёса всегда следует проверять по условиям сцепляемости.
2.2.4.3 Наборы сменных колёс могут быть пятковыми, чётными и универсальными. В первых двух числа зубьев кратны, соответственно, 5 и 4. Пример пяткового набора: 20, 25, 30, 35,..., 120. В наборы может включаться колесо 127 для обеспечения работ в дюймовой системе измерений. 2.2.4.4 Имеется значительное количество способов подбора сменных шестерён гитары. Рассмотрим суть одного из них – способа подбора с разложением передаточного отношения на множители.
Пример. Пусть требуется подобрать из пяткового набора шестерён: 20, 25, 30, 35,..., 120, четыре колеса, обеспечивающие передаточное отношение Представим передаточное отношение в виде двух дробей, разложив числитель и знаменатель на множители: Проверим результат подбора по условиям сцепляемости, приняв из скобок условий (2.1; 2.2) число 20: 30+45>20+20 (первое условие выдерживается), 20+40<45+20 (второе условие не выдерживается).
Если условия сцепляемости (одно или оба) не выдерживаются, то можно переставить местами числитель с числителем, или знаменатель со знаменателем, или дроби. Переставим в примере знаменатели:
Ручное управление станками
2.2.11.1 Ручное управление циклом работы станка осуществляется рабочим при помощи рукояток, штурвалов, маховичков, кнопок и т.п. органов управления. Системы ручного управления можно разделить на механические, гидрофицированные и электрифицированные. В механических системах управления ручное перемещение органов управления (рукояток, маховичков) через передаточные механизмы передается объектам управления (муфтам, передвижным блокам зубчатых колес, зажимам и т.п.). В гидрофицированных системах вручную переключаются гидрораспределители, управляющие перемещением гидродвигателей, воздействующих на объекты управления. Электрифицированное управление сводится обычно к воздействию на кнопки, включающие или отключающие через различные электрические аппараты те или иные электродвигатели приводов станка, электромагнитные муфты и т.п.
2.2.11.2 При проектировании органов ручного управления учитывают требования эргономики – науки о взаимодействии человека с машиной. Основные требования к органам управления следующие: а) все часто используемые рукоятки необходимо располагать в зоне, удобной для обслуживания. Для этого следует представлять пространство, которое может обслужить рабочий только за счёт рук, не наклоняя свои плечи и корпус. В зоне, близко расположенной к рабочему, целесообразно устанавливать органы, манипулирование которыми требует больших усилий. Учитывая физиологические различия правой и левой руки, следует располагать органы управления для точных перемещений так, чтобы рабочему было удобно управлять ими правой рукой; б) если при работе станка рабочему приходится перемещаться из-за необходимости наблюдения за обработкой, органы управления целесообразно располагать на передвижном пульте управления; таковым может являться подвесной пульт (кнопочная станция или пост), который помещается на поворотном кронштейне и легко занимает положение, удобное для рабочего. Если органы управления установлены на перемещающемся при работе станка узле и могут занимать неудобное для рабочего положение, то следует дублировать важнейшие органы управления и органы для аварийной остановки станка;
одновременное включение двух несовместимых движений или, в других случаях, не допускали бы включения одного движения при не включенном другом; - ставить ограничители пути установочных движений; - использовать сигнальные устройства; ж) следует выполнять правило мнемоничности управления, требующее соответствия направления и характера перемещения органа управления направлению и характеру перемещения объекта управления. В качестве примеров можно рассмотреть некоторые случаи (рис. 2.14): направление перемещения узла должно совпадать с направлением поворота рукоятки, включающей это движение; если орган управления поворачивается в плоскости, перпендикулярной перемещению управляемой части станка, то при вращении этого органа по часовой стрелке перемещаемая часть станка должна удаляться от него.
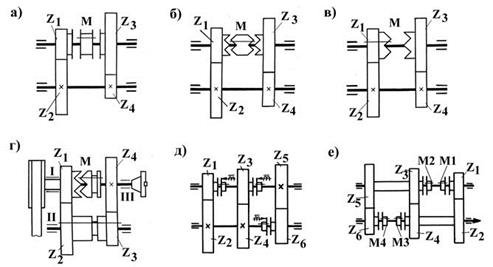
2.2.11.2 Для ручного управления переключением скоростей и подач станка могут применяться многорукояточные (многорычажные) и однорукояточные (однорычажные) системы управления. В первом случае цепи управления деталями одного и того же узла являются независимыми друг от друга, т.е. для управления каждым перемещаемым элементом предусмотрен свой орган управления – рукоятка, педаль, штурвал. Такие системы целесообразны в станках с небольшим числом переключаемых элементов и сравнительно редкими переключениями. В случае однорукояточного управления при помощи одной рукоятки производится перемещение нескольких или всех переключаемых элементов. При многорукояточном управлении перемещение подвижных блоков шестерен привода производится механизмами: - с переводными рычагами (рис. 2.15,а),
|
||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-08-10; просмотров: 551; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.20.238.187 (0.096 с.) |
 ,
, и
и 
 ,
, , откуда a + б = 2 A / m = сonst, т.е. должно всегда выдерживаться условие Z1+Zn=Z2+Zn-1=... = a+б = сonst.
, откуда a + б = 2 A / m = сonst, т.е. должно всегда выдерживаться условие Z1+Zn=Z2+Zn-1=... = a+б = сonst.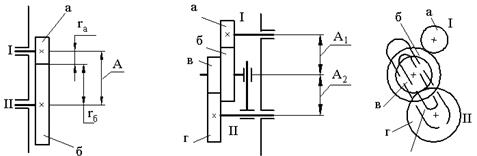
 .
. , откуда
, откуда  и
и и
и
 . Затем умножим числитель и знаменатель каждой дроби на какое-либо число, чтобы в результате получить числа из набора шестерён:
. Затем умножим числитель и знаменатель каждой дроби на какое-либо число, чтобы в результате получить числа из набора шестерён:  .
. тогда получится: 30+40>20+20 и 20+45>40+20, т.е. условия сцепляемости при таком подборе выдерживаются.
тогда получится: 30+40>20+20 и 20+45>40+20, т.е. условия сцепляемости при таком подборе выдерживаются. Рис. 2.14. Обеспечение мнемоничности управления перемещениями рабочих органов
Рис. 2.14. Обеспечение мнемоничности управления перемещениями рабочих органов



