
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Вопрос №34 Исследование компенсаторов наклона в нивелирах.Содержание книги
Похожие статьи вашей тематики
Поиск на нашем сайте
В нивелирах компенсатор заменяет цилиндрический уровень при зрительной трубе, поэтому работа этого узла подвергается достаточно детальным исследованиям. При исследованиях определяют три главных параметра: * диапазон работы компенсатора; * его чувствительность и ошибку компенсации углов наклона; * время затухания колебаний компенсатора. Диапазон действия компенсатора определяют в двух взаимно перпендикулярных направлениях, при продольных и поперечных (боковых) наклонах нивелира в обе стороны от нуль-пункта установочного (круглого) уровня. Исследование выполняют либо с использованием нивелирной рейки (в полевых условиях), либо с помощью экзаменатора (в лабораторных условиях). В первом случае (по рейке без экзаменатора) перед исследованиями подставку устанавливают так, чтобы один из подъемных винтов находился под объективом или окуляром зрительной трубы, находят угловую величину наклона трубы нивелира при вращении подъемного винта на один полный оборот по формуле β= Затем начинают производить наклоны прибора в продольном и боковом направлениях, фиксируя момент «зависания» маятника компенсатора (сетка нитей начинает перемещаться пропорционально наклону) и величину п поворота подъемного винта в долях длины окружности головки подъемного винта. Угловая величина диапазона действия компенсатора Более точно величину α определяют в лабораторных условиях при помощи экзаменатора с ценой деления шкалы винта не более 30". По этой схеме момент зависания маятника фиксируется по положению освещенной сетки нитей нивелира, наблюдаемой в трубу коллиматора. В этом случае значение экстремального угла наклона определяют непосредственно по шкале экзаменатора по формуле Ошибки компенсации углов наклона в полевых условиях определяют по превышениям, измеренным на станции при длине визирного луча 5, 25, 50 и 100 м для Н-ЗК, Н-10КЛ; 5, 25, 50 и 75 м для Н-05К. Наклон нивелира производят в продольном и боковом направлениях на угол
Эта программа составляет один прием. Для каждого расстояния должно быть сделано не менее 5 приемов. Между приемами изменяется горизонт нивелира. Ошибку компенсации ГДе
Вопрос №35 Механические передачи – механизм, служащий для передачи и преобразования механической энергии от энергетической машины до исполнительного механизма (с изменением характера движения). Существуют: - цилиндрические - зубчатые - червячные - фрикционные - конические - передачи из винта и гайки - передачи зубчатой рейкой - шарнир Гука. Вопрос№36 Типы конструкций вертикальных и горизонтальныз осевых систем. Осевые системы являются основными механическими узлами геодезических приборов. Точность, долговечность и надежность, в особенности угломерных приборов, во многом зависят от этих устройств. Механические осевые системы определяют взаимное положение оптико-механических узлов геодезического прибора в строгом соответствии с его геометрической конструкцией. По своей форме осевые системы могут быть конические и цилиндрические, а по назначению и расположению — вертикальные и горизонтальные.
Вертикальные осевые системы современных угломерных приборов можно классифицировать по виду трения, так как осевая система — это всегда один или несколько подшипников. По этому признаку различают три вида осевых систем: 1) с трением скольжения; 2) с трением качения 3) комбинированные. В большинстве известных систем имеет место вертикальное разнесение подшипников и основных связей; в некоторых приборах принято горизонтальное разнесение. Среди осевых систем, основанных на трении скольжения, раньше всего стали применять конические осевые системы.Они просты в изготовлении и подгонке деталей. Основными деталями любой осевой системы является втулка и ось.Общий допуск на наклоны, вызываемые несовершенством осевой системы, составляет
Наводящее устройство выполняют так, чтобы влияние на ось сил, способных сдвинуть ее по азимуту или высоте, было минимальным
Суммарная ошибка соблюдения геометрических параметров горизонтальной осевой системы (отклонения от цилиндрической формы, соблюдение диаметра цапфы, качество шлифовки и т. п.) определяются как
Вопрос№ 37 Подставки и подъёмные винты. Требования: ---- Размеры основания подставки выбирают в зависимости от высоты центра тяжести прибора над головкой штатива.Подставки могут быть треугольной или круглой формы. ---- Диаметр головок подъёмных винтов согласуютс точностью цилиндрического уровня при алидаде горизонтального круга. ----Подъёмные винты должны плавно поворачиваться и не иметь люфта. Обычно имеются 3 подъемных винта (может быть и 4) Штатив геодезического прибора должен обеспечивать надежную и устойчивую установку прибора на рабочем месте и удобную работу в процессе измерений. Штатив состоит из трех, как правило, деревянных ножек и металлической головки. На нижних концах ножек делают заостроенные металлические наконечники. Штативы изготовляются с ножками постоянной длины и с раздвижными ножками. В современных штативах прибор прикрепляется через отверстие в столике с помощью натяжного (станового) винта путем ввинчивания последнего во втулку пружинящей пластины подставки геодезического прибора (рис. 91). Подставка должна быть устойчивой, а азимутальные сдвиги носить упругий характер.Нижняя пластина подставки скреплена винтовыми соединениями с пружинящей пластиной, имеющей резьбовую втулку в центре для ввинчивания станового винта. Такое крепление позволяет при центрировании перемещать прибор по столику штатива в любом направлении на 2/3 см. Подставка геодезического прибора (трегер) включает литой корпус со втулкой и закрепительным винтом, пружинную и опорную пластины и подъемные винты. Шаг резьбы и диаметр головки подъемного винта связаны с ценой деления уровня при алидаде горизонтального круга зависимостью где s — шаг резьбы; Вопрос №38 Закрепительные и наводящие устройства. Служат для точного наведения прибора на визирную цель или для установки лимба на определённый отсчёт, для временного скрепления отдельных узлов прибора. Закрепительные и наводящие устройства,типы: 1) «центральное» зажимное, наводящее устройство — применяется в приборах технических; 2) с рычажной передачей — применяется в приборах средней и высокой точности; 3) с коаксиальным расположением закрепительного и наводящего устройств — в теодолитах средней и высокой точности последних выпусков; 4) фрикционные зажимы и бесконечный микрометренный привод. Требования к з. и н. устройствам: 1. Плавность хода, 2. Отсутствие смещения зрительной трубы с визирной цели после прекращения действия наводящего устройства, 3. Согласованность конструкции со способности руки наблюдателя ощущать малые перемещения. Для выполнения этого условия задаются диаметром головки наводящего винта и расстоянием от оси вращения до оси наводящего винта, затем определяют шаг резьбы винта s=
Вопрос № 39 Элевационные винты. Исправительные винты уровней и сеток нитей. Точную установку визирной оси нивелиров с жидкостным уровнем производят с помощью элевационного устройства, позволяющего согласовать чувствительность пальцев наблюдателя с необходимой точностью установки пузырька в нуль-пункт.
На рис. 96 представлен 'разрез элевационного винта нивелира типа НЗ. Перемещение конуса 3 наклоняет зрительную трубу вокруг горизонтальной оси вращения. При ввинчивании головки винта 5 соединительный штифт 4 толкает конус 3 в направляющих корпуса 6, при этом пружина 7 сжимается, а подъемный штифт 2 двигается вверх, поднимая окулярную часть 1 зрительной трубы. При вывинчивании головки 5 возвратная пружина 7 перемещает конус 3 в сторону винта 5, при этом штифт 2 опускается — опускается и окулярная часть зрительной трубы. На рис. 97 показана схема элевационного устройства рычажного типа высокоточного нивелира H1. На рис. 97 обозначены: 1 — зрительная труба; 2 — горизонтальная ось; 3 — неравноплечий рычаг цилиндрической формы; 4 — элевацион-ный винт; 5 — втулка вертикальной оси; 6 — полуоси неравноплечего рычага; 7 — подставка с вертикальной осью; 8 — возвратная пружина. Сетка нитей устанавливается в зрительной трубе таким образом, чтобы она находилась в передней фокальной плоскости окуляра. Сетка вставляется в кольцевую оправу (рис. 98), одновременно ограничивающую падающий на нее пучок световых лучей и тем самым определяющую величину поля зрения — диафрагму поля зрения. Это кольцо может в небольших пределах перемещаться при помощи четырех юстировочных винтов
с целью изменения положения оси при исправлении коллимационной ошибки или МО вертикального круга. В некоторых теодолитах сетка нитей закрепляется неподвижно, для исправления коллимационной ошибки наклоняется относительно горизонтальной оси зрительная труба. Важное значение для правильности и стабильности показаний уровня имеет конструкция юстировочного устройства для исправления положения оси уровня. Конструкция юстировочного устройства должна обеспечивать неизменность положения оси уровня во время измерений и переноса прибора с одной точки на другую.
№40 Общие сведения о теодолитах, классификация, геометрические условия Это приборы для измерения горизонтальных и вертикальных углов, для измерения расстояний и определения магнитных азимутов по ориентир-буссоли., для нивелирования горизонтальным лучом с помощью уровня при трубе, при разбивке плановых и высотных съёмочных сетей. По конструкции: оптические, электронные, лазерные; по точности: высокоточные (СКП измерения угла 1 приёмом до 1сек), точные (2-5сек), технические(15-60сек). Зрительная труба может давать прямое или перевёрнутое изображения. В основном выпускаются с компенсаторами, устроняющими ошибки, вызванные наклоном прибора во время работы. Некоторые теодолиты имеют встроенный в алидадную часть оптический центрир 1. Геом условия: Поверка цилиндрического уровня Геометрическое условие: Ось цилиндрического уровня при алидаде горизонтального круга должна быть перпендикулярна к вертикальной оси вращения прибора. 2.Поверка сетки нитей Геометрическое условие: вертикальная нить сетки нитей должна быть перпендикулярна к горизонтальной оси вращения теодолита. 3. Поверка равновеликости подставок. Геометрическое условие: Ось вращения зрительной трубы должна быть перпендикулярна вертикальной оси теодолита 4. Поверка коллимационной погрешности. Геометрическое условие: Визирная ось трубы должна быть перпендикулярна горизонтальной оси вращения теодолита, т.е. плоскости визирования должны быть отвесны. Отсчёты при разных кругах на одну точку должны отличаться ровно на 180۫, а отклонение от 180˚ будет равно двойной коллимационной погрешности. Коллимационная ошибка С проверяется по горизонтальному кругу. С=(КЛ – КП)/2 5. Поверка места нуля. Геометрическое условие: Место нуля должно равняться нулю или быть близкой к нему величиной. МО – это отсчёт по ВК при горизонтальном положении визирной оси трубы и приведённом в нуль-пункт пузырьке уровня. МО=(КЛ+КП)/2 6. Визирная ось оптического визира должна быть параллелна визирной оси трубы. 7. Визирная ос оптического центрира,встроенного в алидадную часть теодолита,должна быть совмещена с его вертикальной осью вращения. 8. Компенсатор отсчётной системы ВК должен обеспечивать постоянство отсчётов при наклонах В оси теодолита в допустимых пределах 9.Ось круглого уровня при алидаде ГК должна быть параллельна вертикальной оси теодолита
Вопрос №41 Исследование эксцентриситета алидады и лимба горизонтального круга. Вращение горизонтального круга (лимба и алидадной частей теодолита должно происходить вокруг общей вертикальной (геометрической) оси, называемой главной осью вращения теодолита. Несовпадение центра делений лимба с центром вращения алидады называется эксцентриситетом алидады. При различной ориентировке алидады погрешности в отсчётах за эксцентриситет изменяются. При неподвижном лимбе и вращении алидады на равные угловые промежутки и снятии с них отсчётов, выявленные погрешности за эксцентриситет алидады на построенном графике дадут кривую типа синусоиды. Если построенный график будет значительно отличным от плавной кривой, то у алидады наблюдаются значительные колебания, которые и внесли в отсчёты погрешности. От погрешности за эксцентриситет свободет отсчёт, взятый при совмещённом изображении шкал лимба. А отсчёт, взятый при совмещении ближайшего штриха с индексом содержит погрешность. Погрешность есть разность этих отсчётов. Алидада переставляется через 30 по всей окружности в прямом и обратном направлениях, лимб неподвижен. Эксцентриситетом ГК (лимба) наз-ся несовпадение центра вращения лимба с его центром его делений. При неподвижном лимбе его эксцентриситет не влияет на отсчёты при любом положении алидады. Лимб смещается между приёмами, а значит смещается центр его деления. Определяется как и эксцентриситет лимба, только неподвижна алидада, а вращается лимб. Наибольшее влияние эксцентриситеты лимба и алидады когда центр вращения алидады и центр делений лимба располагаются на одной прямой с центром вращения лимба, но по разные стороны от него Таким образом, при исследовании эксцентриситета алидады ГК необходимо определить величины: На, графике по оси абсцисс откладываются установки лимба, а по оси ординат значения Vi, полученные из наблюдений на каждой установке. Соединяя последовательно точки Vi в прямом ходе, получают ломаную линию прямого хода, такую же линию строят для обратного хода. Затем от руки проводят плавную сглаживающую кривую типа синусоиды, как среднюю между двумя ломаными линиями графика. Проводится ось симметрии синусоиды. На графике амплитуда синусоиды равна emax (угловой элемент эксцентриситета), его величина не должна превосходить 20"; отстояние оси симметрии синусоиды от оси абсцисс есть угол
|
||||
|
|
Последнее изменение этой страницы: 2016-08-14; просмотров: 675; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.137.219.221 (0.011 с.) |

 ρ, где
ρ, где  — изменение отсчета по рейке (шкале) при одном полном обороте винта; L — расстояние от оси вращения нивелира до рейки.
— изменение отсчета по рейке (шкале) при одном полном обороте винта; L — расстояние от оси вращения нивелира до рейки. определится как
определится как 
 =γN, где N — число делений лимба экзаменатора; γ—цена одного деления лимба экзаменатора.
=γN, где N — число делений лимба экзаменатора; γ—цена одного деления лимба экзаменатора. равный номинальному значению диапазона работы компенсатора. Нивелир во время измерений должен находиться в створе между рейками, на равных расстояниях от них.
равный номинальному значению диапазона работы компенсатора. Нивелир во время измерений должен находиться в створе между рейками, на равных расстояниях от них.
 на одну минуту наклона оси вращения нивелира вычисляют по формуле
на одну минуту наклона оси вращения нивелира вычисляют по формуле 
 — среднее превышение, полученное при наклоне оси нивелира на угол
— среднее превышение, полученное при наклоне оси нивелира на угол  —то же, при положении уровня в нуль-пункте; L — длина визирного луча.
—то же, при положении уровня в нуль-пункте; L — длина визирного луча.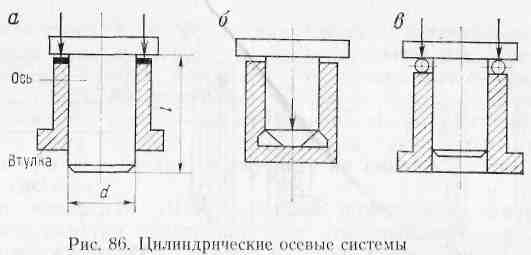 Вертикальные осевые системы. Для обеспечения стабильности системы, необходимой легкости хода оси должны быть длинными. Их длина обычно в 3—4 раза больше диаметра d и выбирается примерно равной l = 2r, где r— радиус горизонтального круга (лимба).
Вертикальные осевые системы. Для обеспечения стабильности системы, необходимой легкости хода оси должны быть длинными. Их длина обычно в 3—4 раза больше диаметра d и выбирается примерно равной l = 2r, где r— радиус горизонтального круга (лимба). где
где  —цена деления уровня при алидадной части угломерного прибора. Отдельные допуски, например, точность изготовления оси (цапфы) алидады определяются как
—цена деления уровня при алидадной части угломерного прибора. Отдельные допуски, например, точность изготовления оси (цапфы) алидады определяются как где r— радиус горизонтального круга.
где r— радиус горизонтального круга. . Горизонтальные осевые системы. При расчете на точность горизонтальных осей исходят из заданной точности сохранения в пространстве положения оси вращения зрительной трубы. Ошибка в измеряемом направлении
. Горизонтальные осевые системы. При расчете на точность горизонтальных осей исходят из заданной точности сохранения в пространстве положения оси вращения зрительной трубы. Ошибка в измеряемом направлении (6.2)где
(6.2)где  —угол наклона зрительной трубы; i — наклон горизонтальной оси. В новых теодолитах устойчивость горизонтальной оси достигается, с одной стороны, конструкцией лагер, а с другой — конструкцией наводящего устройства.
—угол наклона зрительной трубы; i — наклон горизонтальной оси. В новых теодолитах устойчивость горизонтальной оси достигается, с одной стороны, конструкцией лагер, а с другой — конструкцией наводящего устройства.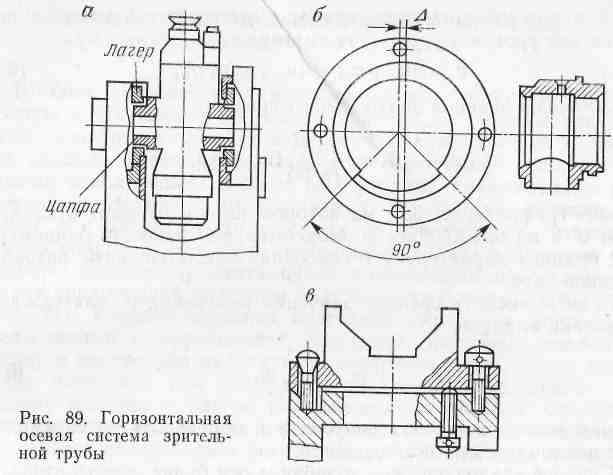
 где
где  — цена деления уровня.
— цена деления уровня.
 —диаметр головки винта; R — радиус окружности, на которой расположены подъемные винты;
—диаметр головки винта; R — радиус окружности, на которой расположены подъемные винты;  — точность установки теодолита по уровню;
— точность установки теодолита по уровню;  —цена деления уровня;
—цена деления уровня;  — чувствительность пальцев наблюдателя.
— чувствительность пальцев наблюдателя. , где s — шаг резьбы винта;
, где s — шаг резьбы винта;  Г - увеличение зрительной трубы; η=0.2мм- чувствительность пальцев наблюдателя,
Г - увеличение зрительной трубы; η=0.2мм- чувствительность пальцев наблюдателя,  =15''. По конструктивному решению закрепит устройства с центральным радиальным и кольцевым периферическим устройствами; Наводящие-дифференциальные, винтовые, шарнирно-рычажные.
=15''. По конструктивному решению закрепит устройства с центральным радиальным и кольцевым периферическим устройствами; Наводящие-дифференциальные, винтовые, шарнирно-рычажные.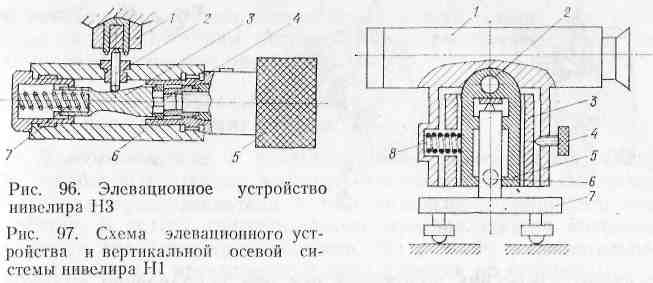 При отсутствии специальных рычажных устройств шаг резьбы элевационного винта будет равен s=
При отсутствии специальных рычажных устройств шаг резьбы элевационного винта будет равен s=  , где L- плечо элевационного винта по отношению к горизонтальной оси вращения; К — коэффициент, соответствующий минимальному дискретному перемещению рукоятки винта, доступное пальцам наблюдателя (при диаметре рукоятки 40 мм К
, где L- плечо элевационного винта по отношению к горизонтальной оси вращения; К — коэффициент, соответствующий минимальному дискретному перемещению рукоятки винта, доступное пальцам наблюдателя (при диаметре рукоятки 40 мм К  оборота); δ—чувствительность уровня (зависит от типа нивелира по точности)
оборота); δ—чувствительность уровня (зависит от типа нивелира по точности)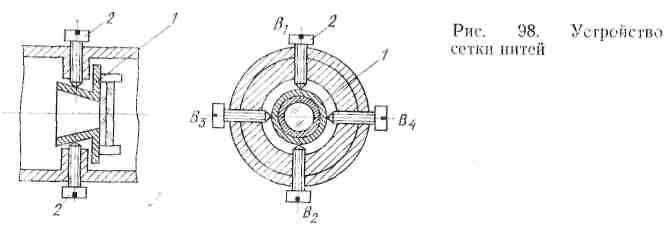
 — постоянный угол, определяющий положение индекса по отношению к диаметру противоположных штрихов лимба; Р — отсчет по лимбу, при котором влияние эксцентриситета на отсчет равно нулю;
— постоянный угол, определяющий положение индекса по отношению к диаметру противоположных штрихов лимба; Р — отсчет по лимбу, при котором влияние эксцентриситета на отсчет равно нулю;  —наибольшее влияние эксцентриситета на односторонний отсчет по лимбу; е — линейный элемент эксцентриситета. найти угловой элемент эксцентриситета
—наибольшее влияние эксцентриситета на односторонний отсчет по лимбу; е — линейный элемент эксцентриситета. найти угловой элемент эксцентриситета  требуется измерить разности по всему кругу, равномерно переставляя алидаду: прямой ход 0, 30,..., 330°; обратный ход 330, 300, 0°. При качественных наблюдениях колебания двух соседних величин v i не должны превышать 15".
требуется измерить разности по всему кругу, равномерно переставляя алидаду: прямой ход 0, 30,..., 330°; обратный ход 330, 300, 0°. При качественных наблюдениях колебания двух соседних величин v i не должны превышать 15". Пересечение восходящей ветви синусоиды с осью симметрии проектируется на ось абсцисс. Полученный отсчет по лимбу определяет односторонний отсчет Р, при котором влияние эксцентриситета равно нулю
Пересечение восходящей ветви синусоиды с осью симметрии проектируется на ось абсцисс. Полученный отсчет по лимбу определяет односторонний отсчет Р, при котором влияние эксцентриситета равно нулю


