Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Расчет и построение нагрузочной диаграммы.Содержание книги
Похожие статьи вашей тематики
Поиск на нашем сайте
Содержание
Введение…………………………………………………………………...…...4 1. Расчёт и построение нагрузочной диаграммы. Выбор и проверка электродвигателя. …..……………………………………………………...….5 1.1. Выбор электродвигателя………………...………………………………..5 1.2. Расчет и построение нагрузочных диаграмм………………………...….8 1.3. Проверка электродвигателя…………………………………………....12 2. Расчет и построение пусковой и тормозной диаграмм………………....15 2.1. Построение естественной характеристики……………………………15 2.2. Построение предварительной пусковой диаграммы……………….....15 2.3. Построение предварительной тормозной диаграммы……….……..16 2.4. Выбор предварительной ступени……………………………………….17 3. Выбор пусковых и тормозных сопротивлений……………………….....18 3.1. Определение расчётных сопротивлений секций реостата……….…...18 3.2. Определение рабочих токов ступеней реостата………………….…....19 3.3. Расчет эквивалентных токов секций реостатов……..…………………19 3.4. Выбор типового ящика сопротивлений………………..……………….21 3.5. Построение полной пусковой и тормозной диаграммы…………...….25 4. Расчет и построение кривых переходных процессов………………...…26 4.1 Общие формулы……………………………………………………….....26 4.2. Расчет времени пуска от 0 до 4.3. Расчет времени пуска от 4.4. Расчет времени торможения от 4.5. Проверка соответствия заданного времени работы…………..……….31 5. Описание работы электропривода…………………………..……...…….32 Библиографический список………………………………………….…...34
Введение
Электропривод (ЭП) включает в себя ряд электротехнических, электронных и механических устройств, в результате чего он представляет собой электромеханическую систему. Электрический привод – электромеханическая система, состоящая из электродвигательного, преобразовательного, передаточного и управляющего устройств, предназначенных для передачи движения исполнительному органу и управления им в соответствии с заданными условиями движения. В электроприводе в качестве электродвигателя могут использоваться: двигатели постоянного тока с разными видами возбуждения, асинхронные и синхронные двигатели и т.д. В данном курсовом проекте необходимо будет спроектировать автоматический электропривод с асинхронным двигателем с фазным ротором. ЭП с ДПТ НВ является основным видом регулируемого ЭП [2, c.46]. Электротехническая промышленность выпускает двигатели постоянного тока основной общепромышленной серии 2П в диапазоне мощностей от 0,13 до 200 кВ с различными конструктивными исполнениями и способами вентиляции, предназначенные в первую очередь для работы в регулируемых ЭП. Также существует серия двигателе постоянного тока 4П на напряжение 110 и 220 В со скоростями вращения от 750 до 3000 об/мин и номинальнами моментами от 2,3 до 15 000 Нм с улучшенными по сравнению с серией 2П показателями, динамическими и виброакустическими свойствами. В качестве регулирования ДПТ применяют включение добавочных резисторов в цепь якоря. Способ реостатного регулирования электроприводом является наиболее простым по своей реализации и поэтому широко используется для регулирования скорости, тока и момента. При этом способе регулирования скорость идеального холостого хода не изменяется, поэтому все искусственные реостатные характеристики пересекаются в точке, соответствующей режиму идеального холостого хода.
РАСЧЕТ И ПОСТРОЕНИЕ НАГРУЗОЧНОЙ ДИАГРАММЫ. ВЫБОР И ПРОВЕРКА ЭЛЕКТРОДВИГАТЕЛЯ Выбор электродвигателя Согласно полученному заданию и кинематической схеме, представленной на рисунке 1.1, производим выбор электродвигателя.
Установившаяся угловая скорость вращения вала двигателя:
где
Установившаяся частота вращения вала двигателя:
Установившаяся угловая скорость вращения барабана:
Приведенный момент статического сопротивления:
где
Требуемая средняя мощность электродвигателя:
где -
По заданной частоте вращения · · Выбираем двигатель типа АКН 15-44-10 со следующими параметрами:
Сопряжение фаз – «звезда». Номинальная частота вращения вала двигателя:
Номинальный момент электродвигателя:
Критический момент электродвигателя:
Момент инерции электродвигателя:
Момент инерции системы Момент инерции барабана:
где
Момент инерции шестерней №2, №3:
Момент инерции системы:
Проверка электродвигателя 1.3.1 Проверка на продолжительность включения
Поскольку продолжительность включения составила более 60%, то электродвигатель будет работать в продолжительном режиме.
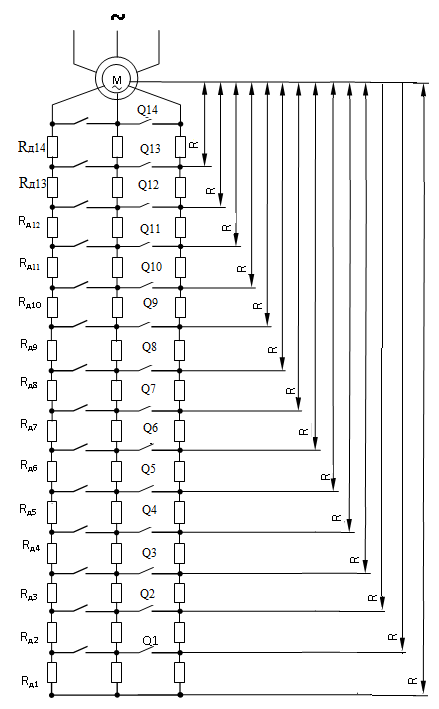
ВЫБОР РЕОСТАТА Выбор пускового реостата Ступени пускового реостата набирают из секций, которые являются частями реостата, заключенными между коммутационными выводами. Для асинхронного двигателя применяют обычно последовательное соединение секций реостата в каждой фазе и включение фаз реостата по схеме “звезда”. Схема соединений ступеней пускового реостата показана на рисунке 3.1.
Рисунок 3.1 - Схема соединений ступеней пускового реостата ЗАКЛЮЧЕНИЕ В результате проделанной работы для функционирования заданной кинематической схемы механизма был выбран асинхронный электродвигатель АКН 15-44-10. Были произведены проверки двигателя на нагрев и перегрузку. Были построены нагрузочная диаграмма и тахограмма. Были выполнены расчет и построение полной диаграммы работы электропривода. Был произведен расчет добавочных сопротивлений в силовой цепи двигателя. В качестве аварийного торможения было выбрано торможение в динамическом режиме. Был осуществлен его расчет. Была разработана принципиальная схема управления электроприводом в соответствии с выданным заданием. Схема обеспечивает автоматическую работу электропривода в соответствии с тахограммой. Пуск и торможение осуществлён в функции времени. Для данной схемы управления была выбрана защитно-коммутационная аппаратура. Рассчитанный автоматизированный электропривод отвечает всем требованиям полученного задания.
БИБЛИОГРАФИЧЕСКИЙ СПИСОК 1. Бычков Е.В. Методические указания к курсовому проектированию по курсу «Теория электропривода» - Ухта. УИИ 1989. 2. Москаленко В.В. Автоматизированный электропривод – М. «Энергоатомиздат» 1986 – 416с. 3. Анчарова Т.В., Каменева В.В. Справочник по электроснабжению промышленных предприятий – М. «Энергоиздат» 1981 – 624с.: ил. 4. Какуевицкий Л.И. Справочник реле защиты и автоматики – М. Государственное энергетическое издание 1962 – 191с.
Содержание
Введение…………………………………………………………………...…...4 1. Расчёт и построение нагрузочной диаграммы. Выбор и проверка электродвигателя. …..……………………………………………………...….5 1.1. Выбор электродвигателя………………...………………………………..5 1.2. Расчет и построение нагрузочных диаграмм………………………...….8 1.3. Проверка электродвигателя…………………………………………....12 2. Расчет и построение пусковой и тормозной диаграмм………………....15 2.1. Построение естественной характеристики……………………………15 2.2. Построение предварительной пусковой диаграммы……………….....15 2.3. Построение предварительной тормозной диаграммы……….……..16 2.4. Выбор предварительной ступени……………………………………….17 3. Выбор пусковых и тормозных сопротивлений……………………….....18 3.1. Определение расчётных сопротивлений секций реостата……….…...18 3.2. Определение рабочих токов ступеней реостата………………….…....19 3.3. Расчет эквивалентных токов секций реостатов……..…………………19 3.4. Выбор типового ящика сопротивлений………………..……………….21 3.5. Построение полной пусковой и тормозной диаграммы…………...….25 4. Расчет и построение кривых переходных процессов………………...…26 4.1 Общие формулы……………………………………………………….....26 4.2. Расчет времени пуска от 0 до 4.3. Расчет времени пуска от 4.4. Расчет времени торможения от 4.5. Проверка соответствия заданного времени работы…………..……….31 5. Описание работы электропривода…………………………..……...…….32 Библиографический список………………………………………….…...34
Введение
Электропривод (ЭП) включает в себя ряд электротехнических, электронных и механических устройств, в результате чего он представляет собой электромеханическую систему. Электрический привод – электромеханическая система, состоящая из электродвигательного, преобразовательного, передаточного и управляющего устройств, предназначенных для передачи движения исполнительному органу и управления им в соответствии с заданными условиями движения. В электроприводе в качестве электродвигателя могут использоваться: двигатели постоянного тока с разными видами возбуждения, асинхронные и синхронные двигатели и т.д. В данном курсовом проекте необходимо будет спроектировать автоматический электропривод с асинхронным двигателем с фазным ротором. ЭП с ДПТ НВ является основным видом регулируемого ЭП [2, c.46]. Электротехническая промышленность выпускает двигатели постоянного тока основной общепромышленной серии 2П в диапазоне мощностей от 0,13 до 200 кВ с различными конструктивными исполнениями и способами вентиляции, предназначенные в первую очередь для работы в регулируемых ЭП. Также существует серия двигателе постоянного тока 4П на напряжение 110 и 220 В со скоростями вращения от 750 до 3000 об/мин и номинальнами моментами от 2,3 до 15 000 Нм с улучшенными по сравнению с серией 2П показателями, динамическими и виброакустическими свойствами. В качестве регулирования ДПТ применяют включение добавочных резисторов в цепь якоря. Способ реостатного регулирования электроприводом является наиболее простым по своей реализации и поэтому широко используется для регулирования скорости, тока и момента. При этом способе регулирования скорость идеального холостого хода не изменяется, поэтому все искусственные реостатные характеристики пересекаются в точке, соответствующей режиму идеального холостого хода.
РАСЧЕТ И ПОСТРОЕНИЕ НАГРУЗОЧНОЙ ДИАГРАММЫ.
|
|||||||||||||||
|
|
Последнее изменение этой страницы: 2016-08-01; просмотров: 922; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.189.143.150 (0.007 с.) |

 ………………………………….…......26
………………………………….…......26 ………………………………………27
………………………………………27 до
до  ………………………………29
………………………………29
 ,
, - передаточное отношение механической передачи;
- передаточное отношение механической передачи; - установившаяся скорость подъема груза, м/с;
- установившаяся скорость подъема груза, м/с; - диаметр барабана, м.
- диаметр барабана, м. - маховый момент барабана,T·м2
- маховый момент барабана,T·м2 с-1.
с-1. .
. об/мин.
об/мин. .
. с-1.
с-1. ,
,
 - усилие статического сопротивления в начале и конце цикла, кН;
- усилие статического сопротивления в начале и конце цикла, кН; - число одновременно работающих электродвигателей;
- число одновременно работающих электродвигателей; - коэффициент полезного действия системы.
- коэффициент полезного действия системы.
 ,
, - коэффициент запаса.
- коэффициент запаса. кВт.
кВт. (об/мин) и средней мощности
(об/мин) и средней мощности  по каталогу выбираем двигатель с параметрами удовлетворяющими следующим условиям:
по каталогу выбираем двигатель с параметрами удовлетворяющими следующим условиям: ;
; .
. - номинальная мощность электродвигателя, кВт;
- номинальная мощность электродвигателя, кВт; - номинальная частота вращения вала двигателя, об/мин;
- номинальная частота вращения вала двигателя, об/мин; - синхронная частота вращения вала двигателя, об/мин;
- синхронная частота вращения вала двигателя, об/мин; - напряжение в обмотке статора, В;
- напряжение в обмотке статора, В; - ток в обмотке статора, А;
- ток в обмотке статора, А; - напряжение в обмотке ротора, В;
- напряжение в обмотке ротора, В; - ток в обмотке ротора, А;
- ток в обмотке ротора, А; - номинальный коэффициент полезного действия электродвигателя, %;
- номинальный коэффициент полезного действия электродвигателя, %; - коэффициент мощности;
- коэффициент мощности; - перегрузочная способность;
- перегрузочная способность; - маховый момент электродвигателя, Т*м2;
- маховый момент электродвигателя, Т*м2; .
. с-1.
с-1. .
.
 .
. .
.
 .
. кг*м2.
кг*м2. ,
, T∙м2 - маховый момент барабана,
T∙м2 - маховый момент барабана, кг∙м2.
кг∙м2. ,
, .
. кг∙м2.
кг∙м2. кг∙м2.
кг∙м2. ,
, кг∙м2.
кг∙м2.
 .
.