
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Формулировка основной теоремы алгебрыСодержание книги
Поиск на нашем сайте
Основная теорема высшей алгебры. Многочлен n -ой степени имеет на комплексной плоскости ровно n нулей (с учетом их кратности). Разложение многочлена с действительными коэффициентами на линейные квадратичные множители: Pn (z) = an z n + an -1 z n -1 +….+ a1 z + a0 Если коэффициент многочлена действительные числа и z0 = x0 + iy0 - его комплексный корень, то сопряженное число z0* = x0 + iy0 – так же корень этого многочлена, причем корни z0 и z0* имеют одинаковую кратность. Пусть многочлен Pn (z) имеет корни z1, z2,…., zm (m≤ n) кратностей соответственно k1, k2, … km (k1 + k2 + …+ km = n). Тогда его можно разложить на линейные и квадратичные множители. Вещественному корню a кратности k соответствует множитель (z – a) k Комплексному корню a + ib кратности k соответствует множитель (z –(a+ib))k (z-(a-ib)) k = = (z2 – 2 az + a2 + b2 ) Разложение многочлена с действительными коэффициентами на линейные квадратичные множители: Pn (z) = an z n + an -1 z n -1 +….+ a1 z + a0 Если коэффициент многочлена действительные числа и z0 = x0 + iy0 - его комплексный корень, то сопряженное число z0* = x0 + iy0 – так же корень этого многочлена, причем корни z0 и z0* имеют одинаковую кратность. Пусть многочлен Pn (z) c вещественными коэффициентами имеет корни z1, z2,…., zm (m≤ n) кратностей соответственно k1, k2, … km (k1 + k2 + …+ km = n). Тогда его можно разложить на линейные и квадратичные множители. Вещественному корню zJ = xJ a кратности k соответствует множитель (z – xJ) kj Комплексному корню zp = xp + iyp кратности kp соответствует множитель (z –(xp+ i xp))kp (z-(xp -iyp)) kp = …. (z2 – 2 xpz + xp2 + xp2 ) kp ….. D > 0
15) Определение системы координат на плоскости и в пространстве (декартова и полярная системы координат). Преобразование декартовой системы координат. (половину у меня бери!!а начало от сюда!!) Декартовой называют прямоугольную систему координат с одинаковыми масштабами по осям Прямоугольная система координат - прямолинейная система координат с взаимно перпендикулярными осями на плоскости или в пространстве. Полярная система координат — двумерная система координат, в которой каждая точка на плоскости определяется двумя числами — полярным углом и полярным радиусом. Полярная система координат особенно полезна в случаях, когда отношения между точками проще изобразить в виде радиусов и углов; в более распространённой, декартовой или прямоугольной системе координат, такие отношения можно установить только путём применения тригонометрических уравнений. Полярная система координат задаётся лучом, который называют нулевым или полярной осью. Точка, из которой выходит этот луч, называется началом координат или полюсом. Любая точка на плоскости определяется двумя полярными координатами: радиальной и угловой. Радиальная координата (обычно обозначается r) соответствует расстоянию от точки до начала координат. Угловая координата, также называется полярным углом или азимутом и обозначается j, равна углу, на который нужно повернуть против часовой стрелки полярную ось для того, чтобы попасть в эту точку.
Билет 15. Декартовой системой координат в пространстве называется совокупность точки и базиса. Плоскости, проходящие через оси координат, называют координатными плоскостями. Декартова система координат называется прямоугольной, если векторы базиса -- единичные и попарно ортогональные (перпендикулярные) друг другу. Базис, образованный единичными попарно ортогональными векторами, называют ортонормированным. Два вектора называются ортогональными, если угол между ними равен прямому углу, т.е. 90 градусов. Полярная система координат — (плоскость)двумерная система координат, в которой каждая точка на плоскости определяется двумя числами — полярным углом и полярным радиусом. Полярная система координат особенно полезна в случаях, когда отношения между точками проще изобразить в виде радиусов и углов. Полярная система координат задаётся лучом, который называют нулевым или полярной осью. Точка, из которой выходит этот луч, называется началом координат или полюсом. Любая точка на плоскости определяется двумя полярными координатами: радиальной и угловой. Радиальная координата (обычно обозначается
Для определения угловой координаты Билет 16. Вектор – это направленный отрезок прямой. Нулевой вектор (0 и наверху вектор)– это любая точка плоскости или пространства. Длина вектора AB- это неотрицательное число, равное длине отрезка АВ. Длину вектора АВ будем обозначать как (модуль вектора АВ). Два вектора называют коллинеарными, если они лежат либо на одной прямой, либо на параллельных прямых. Два вектора называют компланарными, если они лежат либо на одной плоскости, либо на параллельных плоскостях. Два вектора называют неколлинеарными, если они не лежат на одной прямой или параллельных прямых. Два коллинеарных вектора называют сонаправленными, если их направления совпадают и обозначают(а и 2 стрелочки наверх и б). Два коллинеарных вектора называют противоположно направленными, если их направления противоположны и обозначают(также а и 2 стрелочки наверх б). Два вектора называются равными, если они сонаправленные и их длины равны. Два вектора называются п ротивоположными, если они противоположно направлены и их длины равны. Угол между сонаправленными векторами равен нулю градусам (или нулю радиан), а угол между противоположно направленными векторами равен 180 градусам (или
Проекция вектора
Разложение вектора по ортам координатных осей. Рассмотрим в пространстве прямоугольную систему координат Oxyz. Выделим на координатных осях Ох, Оу и Oz единичные векторы (орты), обозначаемые i, j, k соответственно (см. рис. 12).
Выберем произвольный вектор а пространства и совместим его начало с началом координат: а=ОМ. Найдем проекции вектора а на координатные оси. Проведем через конец вектора ОМ плоскости, параллельные координатным плоскостям. Точки пересечения этих плоскостей с осями обозначим соответственно через М1, М2 и Мз.Получим прямоугольный параллелепипед, одной из диагоналей которого является вектор ОМ. Тогда пр ха=|OM 1|, npya = |ОМ2|, прz а=|ОМз|. По определению суммы нескольких векторов находим а = ОМ 1 + M1N + NM. А так как M 1N=OM 2, NM =ОМз, то а=ОМ 1 + ОМ 2 + ОМ3 (5.1)
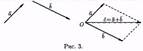
Обозначим проекции вектора а=ОМ на оси Ох, Оу и Oz соответственно через ах, ау и az, т.е. |OM 1| = ах,|ОМ2| = ау, |ОМ3| = аz. Тогда из равенств (5.1) и (5.2) получаем a=axi+ayj+azk (5.3) Эта формула является основной в векторном исчислении и называется разложением вектора по ортам координатных осей. Числа ах, ау, az называются координатами вектора а, т. е. координаты вектора есть его проекции на соответствующие координатные оси. Билет 17. Линейные операции над векторами Под линейными операциями над векторами понимают операции сложения и вычитания векторов, а также умножение вектора на число.Пусть а и b — два произвольных вектора. Возьмем произвольную точку О и построим вектор ОА=а. От точки А отложим вектор АВ = b. Вектор ОВ, соединяющий начало первого вектора с концом второго, называется суммой векторов а и b: О B=а+b. Это правило сложения векторов называют правилом треугольника. Сумму двух векторов можно построить также по правилу параллелoграмма (см. рис. 3).
Можно вычитать векторы по правилу: а - b = а + (-b), т. е. вычитание векторов заменить сложением вектора а с вектором, противоположным вектору b. Произведением вектора а на скаляр (число) λ называется вектор λ*а (или а*λ), который имеет длину |λ|*|а|, коллинеарен вектору а, имеет направление вектора а, если λ>0 и противоположное направление, если λ<0. Из определения произведения вектора на число следуют свойства этого произведения: 1) если b=λ * а, то b|| а. Наоборот, если b || а, ( а0), то при некотором λ верно равенство b = λа; 2) всегда а =|а | • а -о, т. е. каждый вектор равен произведению его мо дуля на орт. Линейные операции над векторами обладают следующими свойствами: 1. а+b=b+а Билет 19. Общее уравнение прямой Общее уравнение прямой линии на плоскости в декартовых координатах:
Уравнение прямой с угловым коэффициентом Уравнение прямой линии, пересекающей ось
Получение уравнения прямой в отрезках
|
||||
|
|
Последнее изменение этой страницы: 2016-07-16; просмотров: 426; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.133.147.158 (0.008 с.) |

 ) соответствует расстоянию от точки до начала координат. Угловая координата, также называется полярным углом и обозначается
) соответствует расстоянию от точки до начала координат. Угловая координата, также называется полярным углом и обозначается  , равна углу, на который нужно повернуть против часовой стрелки полярную ось для того, чтобы попасть в эту точку. Преобразование декартовой системы координат. Пару полярных координат
, равна углу, на который нужно повернуть против часовой стрелки полярную ось для того, чтобы попасть в эту точку. Преобразование декартовой системы координат. Пару полярных координат  и
и  путём применения тригонометрических функций синуса и косинуса:
путём применения тригонометрических функций синуса и косинуса:
 в то время как две декартовы координаты
в то время как две декартовы координаты  (по теореме Пифагора).
(по теореме Пифагора). ,
,  , чтобы получить уникальное значение
, чтобы получить уникальное значение  . Обычно выбирают интервал
. Обычно выбирают интервал  или
или  .
. радиан). Два вектора называются перпендикулярными, если угол между ними равен 90 градусам (или ПИ/2 радиан). Проекция вектора на ось ес ть скалярная величина, равная произведению модуля проектируемого вектора на косинус угла между положительными направлениями оси и вектора (см. рисунок).
радиан). Два вектора называются перпендикулярными, если угол между ними равен 90 градусам (или ПИ/2 радиан). Проекция вектора на ось ес ть скалярная величина, равная произведению модуля проектируемого вектора на косинус угла между положительными направлениями оси и вектора (см. рисунок).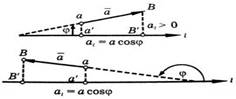
 на ось
на ось  обозначается через al или
обозначается через al или  , а угол между осью
, а угол между осью 
 . Таким образом,
. Таким образом, 

 Если
Если 
 - углы, образованные вектором
- углы, образованные вектором  с координатными осями Ox, Oy и Oz прямоугольной системы координат, то проекции вектора
с координатными осями Ox, Oy и Oz прямоугольной системы координат, то проекции вектора 

 (3) Модуль вектора через его проекции на оси прямоугольной системы координат вычисляется по формуле
(3) Модуль вектора через его проекции на оси прямоугольной системы координат вычисляется по формуле
 (4) Вектор равен нулю, если все три его проекции равны нулю
(4) Вектор равен нулю, если все три его проекции равны нулю

 На рисунке 4 показано сложение трех векторов а, b и с.
На рисунке 4 показано сложение трех векторов а, b и с. Под разностью векторов а и b понимается вектор с=а-b такой, что b+с=а (см. рис. 5).
Под разностью векторов а и b понимается вектор с=а-b такой, что b+с=а (см. рис. 5). Отметим, что в параллелограмме, построенном на векторах а и b одна направленная диагональ является суммой векторов а и b, адругая — разностью (см. рис. 6).
Отметим, что в параллелограмме, построенном на векторах а и b одна направленная диагональ является суммой векторов а и b, адругая — разностью (см. рис. 6).
 Свойства скалярного произведения: 1. a⋅b=b⋅a; 2. a⋅b=0 тогда и только тогда, когда векторы ортогональны;
Свойства скалярного произведения: 1. a⋅b=b⋅a; 2. a⋅b=0 тогда и только тогда, когда векторы ортогональны;

 тогда и только тогда, когда векторы коллинеарны; в частности, [a,a] = 0;
тогда и только тогда, когда векторы коллинеарны; в частности, [a,a] = 0; (антикоммутативность векторного произведения);
(антикоммутативность векторного произведения); (линейность векторного произведения). Смешанным произведением векторов
(линейность векторного произведения). Смешанным произведением векторов  называется число, равное скалярному произведению вектора a на вектор [b,c]. Обозначается:
называется число, равное скалярному произведению вектора a на вектор [b,c]. Обозначается:  или
или  .
. Геометрический смысл смешанного произведения. Модуль смешанного произведения численно равен объему параллелепипеда, построенного на векторах
Геометрический смысл смешанного произведения. Модуль смешанного произведения численно равен объему параллелепипеда, построенного на векторах  Если векторы
Если векторы  (антикоммутативность смешанного произведения);
(антикоммутативность смешанного произведения); (линейность смешанного произведения);
(линейность смешанного произведения); тогда и только тогда, когда векторы компланарные.
тогда и только тогда, когда векторы компланарные. где
где  ,
,  и
и  — произвольные постоянные, причем постоянные
— произвольные постоянные, причем постоянные  называется нормальным вектором, он перпендикулярен прямой. Вектор с координатами (− B, A) или (B, − A) называется направляющим вектором. При
называется нормальным вектором, он перпендикулярен прямой. Вектор с координатами (− B, A) или (B, − A) называется направляющим вектором. При  прямая проходит через начало координат. Также уравнение можно переписать в виде
прямая проходит через начало координат. Также уравнение можно переписать в виде
 в точке
в точке  и образующей угол
и образующей угол  :
: Коэффициент
Коэффициент  называется угловым коэффициентом прямой. В этом виде невозможно представить прямую, параллельную оси
называется угловым коэффициентом прямой. В этом виде невозможно представить прямую, параллельную оси 



