
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Способы балансировки вращающихся изделий.Содержание книги
Поиск на нашем сайте
При статической балансировке определяют опытным путем наиболее легкую и тяжелую части детали; уменьшая массу тяжелой части за счет снятия металла или утяжеляя легкую путем установки дополнительных грузов, достигают необходимого уравновешивания. лишний металл снимают сверлением, фрезерованием и т.п. дополнительные корректирующие грузы устанавливают при помощи сварки, наплавки, присоединяя болтами и т.п.
2.Номера сечений 1.Диаграмма К - среднеарифметическое значение амплитуды синусоиды. Последовательность операций для проведения статической балансировкиследующая: 1) Делят мелом окружность детали на шесть равных частей и нумеруют согласно рисунку 2) поворачивают диск таким образом, чтобы каждые два противоположных деления (1 и 4, 2 и 5, 3 и 6) поочередно оказались в горизонтальной плоскости. 3) Подвешивая или убирая грузы, необходимо добиться поочередно неподвижного положения диска на ножах после каждого поворота, располагая грузы на одинаковом расстоянии от оси вращения. В результате этой операции получается следующая совокупность уравновешивающих грузов: m1,m2,m3,m4=-m1, m5=-m2, m6=-m3. 4) Определяется дисбаланс в результате нечувствительности из-за Динамическая балансировка (длинна дет больше диаметра) деталей и сборочных единиц осуществляется на балансировочных станках различной конструкции. Вал находится в статическом равновесии. На противоположных концах вала расположены две неуравновешенные массы: m1, находящаяся на расстоянии а от левого подшипника, и m2,находящаяся на расстоянии b от правого подшипника. При вращении вала возникают центробежные силы F и Q, которые не совпадают по направлению, в результате чего создается момент центробежных сил, являющийся причиной дополнительных нагрузок и вибраций.
Силы Q и F могут быть разложены на две составляющие, отнесенные к торцовым поверхностям. Величина составляющих силы F определяется из уравнений: F1=F(l-a)/l; F2=Fa/l, где F1+ F2=F Аналогично определяется величина составляющих силы Q. Сложив силы, отнесенные к торцам детали по правилу параллелограмма, получим их результирующие R1 и R2, которые и следует уравновесить, чтобы получить динамически уравновешенную деталь. Для устранения динамической неуравновешенности необходимо на противоположной стороне торцовых поверхностей установить грузы таким образом, чтобы создаваемые ими центробежные силы Re1 и Re2 были равны по величине и противоположно направлены силам R1 и R2
Решая треуго по двум сторонам и углу между ними α, находим сторону ВС и угол β. Постоянный груз mу массой mу= mп(АС/ВС), установленный на поверхности детали в точке 3 под углом β к расположению пробного груза mп полностью компенсируют дисбаланс детали. Дисбаланс можно ликвидировать удалением массы металла М=mу в точке, расположенной на 180° от расчетной.
|
||||
|
|
Последнее изменение этой страницы: 2016-07-14; просмотров: 626; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.136.18.192 (0.005 с.) |

 Схема стенда для стат балансировки: 1-уравновешивае деталь; 2-вал (оправка);3-ножи; 4-стойки основания стенда
Схема стенда для стат балансировки: 1-уравновешивае деталь; 2-вал (оправка);3-ножи; 4-стойки основания стенда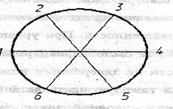

 .
. Метод двух пусков. Требуется виброизмерительные приборы с фазоизмерительным устройством (стробоскоп). На торце балансируемой детали наносят ориентир, например отметку 1. При первом пуске без пробного груза измеряют амплитуду колебаний и на основании стробоскопического эффекта наносят положение отметки 1 на неподвижной части машины. Затем на поверхности детали, где можно установить постоянный балансирный груз устанавливают пробный груз mппод углом 90° к отметке 1. Проводят второй пуск, измеряют амплитуду колебания и угол, на который перемещается отметка на детали из положения 1 в положение 2. В выбранном масштабе вычерчивают в виде вектора АВ амплитуду колебания при первом пуске и в виде вектора АС втором пуске.
Метод двух пусков. Требуется виброизмерительные приборы с фазоизмерительным устройством (стробоскоп). На торце балансируемой детали наносят ориентир, например отметку 1. При первом пуске без пробного груза измеряют амплитуду колебаний и на основании стробоскопического эффекта наносят положение отметки 1 на неподвижной части машины. Затем на поверхности детали, где можно установить постоянный балансирный груз устанавливают пробный груз mппод углом 90° к отметке 1. Проводят второй пуск, измеряют амплитуду колебания и угол, на который перемещается отметка на детали из положения 1 в положение 2. В выбранном масштабе вычерчивают в виде вектора АВ амплитуду колебания при первом пуске и в виде вектора АС втором пуске.


