Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Методичний приклад розрахунку параметрів електричної схеми коректуючого пристрою, її розробки та симуляції у середовищі Micro-CapСодержание книги
Поиск на нашем сайте Заключним етапом роботи є засвоєння навиків розробки електричної схеми коректуючого пристрою, отриманого при синтезі з допомогою спеціалізованих програм. Вхідними даними є функція передачі послідовного коректуючого пристрою і його ЛАЧХ. Виходячи із вигляду функції передачі і ЛАЧХ потрібно із таблиці 5.1 (с. 231 Г.Ф.Зайцев, В.К.Стеклов, О.І.Бріцький “Теорія автоматичного управління”) вибрати необхідну схему. Нехай функція передачі і ЛАЧХ послідовного коректуючого пристрою має наступний вигляд:
Тоді асимптотична ЛАЧХ коректуючого пристрою, яка побудована у середовищі MatLab 6.0, може бути представлена графіком який зображений на рисунку 4.1.
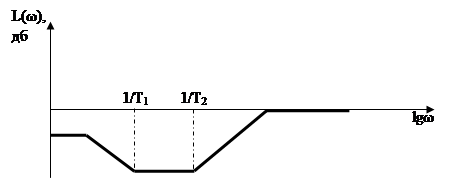
Рисунок 4.1 – Асимптотична ЛАЧХ коректуючого пристрою Порівнявши дану ЛАЧХ з типовими ЛАЧХ коректуючих пристроїв в [3], знаходимо потрібну, яка бути представляти собою інтегро-диференцюючий ланцюг першого порядку (рис.4.2).
Рисунок 4.2 – ЛАЧХ інтегро-диференціюючого ланцюга першого порядку
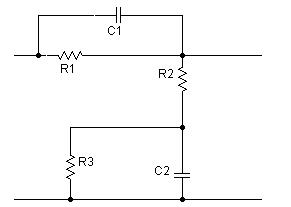
Тоді електрична схема одного з послідовних каскадів послідовного коректуючого пристрою матиме вигляд:
Рисунок 4.3 – Електрична схема інтегро-диференціюючого ланцюга першого порядку
Формули для розрахунку номіналів даної електричної схеми – величини опорів і ємностей матимуть наступний вигляд [3]:
Як бачимо для розрахунку номіналів електричної схеми використовуються постійні часу Т1 і Т2 послідовного коректуючого пристрою. Маємо два рівняння з пятьма невідомими – R1, R2, R3, С1 та C2. Тому, для того щоб знайти параметри усіх елементів електричної схеми потрібно задатися деякими із них. Отже: Приймаємо:
Тоді:
Приймаємо: Тоді:
Зауваження: 1. Якщо у ЛАЧХ присутні ланки із нахилом не 20 дб/дек, а йому кратним (40, 60...), тоді потрібно взяти кілька таких схем (відповідно до кратності) і сполучити їх послідовно. 2. Так як програма не може емулювати схеми із високою точністю, через емпіричність приведених схем у таблиці а також втрат напруги, параметри елементів схеми потребують певної корекції. 3. Так як у нас присутні втрати напруги і всі елементи схеми є пасивними, на виході схеми слід встановити операційний підсилювач для підняття ЛАЧХ схеми, підсилення. Підбором величини двох опорів встановлюють певний коефіцієнт підсилення. Не забудьте про живлення операційного підсилювача. В даному конкретному випадку ми отримали електричну схему, приведену нижче:
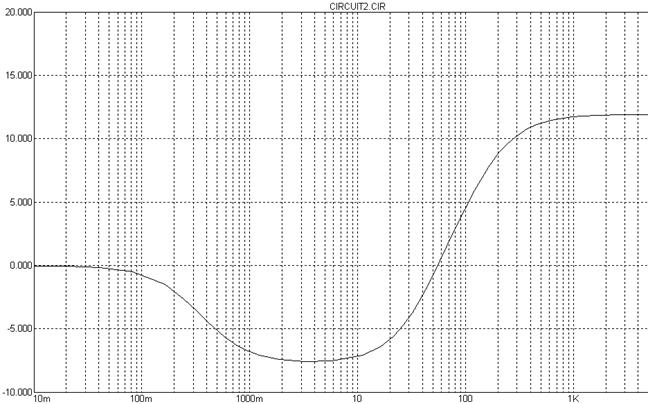
Рисунок 4.4 – Принципова електрична схема послідовного коректуючого пристрою Дана схема була симульована з допомогою програми Micro-CAP. Щодо нюансів при роботі з даною програмою, то вони незначні. Елементи для схеми вибираються із верхньої панелі. Для того щоб повернути елемент на 900 необхідно утримуючи ліву клавішу миші, натиснути необхідну кількість разів на праву клавішу миші. Параметри елементів можна одразу вказувати при вибору елементів із верхньої панелі. Проте можна і пізніше двічі клацнувши на цьому елементі та заповнивши поле VALUE. Також необхідно не забути про елемент заземлення. Щоб отримати графік необхідно встановити точку виходу. Для цього вибираємо компонент TEXT і вписуємо тоді строку Out. Тоді переміщаємо цей напис до виходу схеми до того моменту поки не отримаємо поряд червону точку. Для активації графіку потрібно натиснути комбінацію клавіш: Alt+2. З’являється спочатку меню налаштування графіку. У пункті У нашому випадку був отриманий графік ЛАЧХ, який зображений на рисунку 4.5. Як бачимо, він практично співпвдає з розрахунковим графіком ЛАЧХ, отриманий при синтезі послідовного коректуючого пристрою.
Рисунок 4.5 – Результати симуляції у середовищі Micro-CAP Завдання до роботи. 5.1. Вибір завдання. Завдання вибирається наступним чином: номер варіанта повинен співпадати з останньою цифрою номера залікової книжки студента; номер підваріанта – з передостанньою цифрою номера n, якщо вона не перевищує 5, та визначається n-5, при n>5. Якщо передостання цифра шифру 0, то n прирівнюється до 10. Завдання. По даних функціях передачі окремих елементів (дивись відповідний варіант та таблицю) системи, структура якої зображена на рисунку необхідно: - провести дослідження нескоректованої системи на стійкість за допомогою вказаного в таблиці критерію; - побудувати ЛАЧХ та ЛФЧХ нескоректованої системи і підтвердити висновок щодо її стійкості; - провести послідовну корекцію структури початкової системи, з метою досягнення заданих часу перехідного процесу tПП і перерегулювання s% (дивись таблицю), знайти перехідну характеристику системи, визначити параметри якості регулювання та запаси стійкості системи по амплітуді та фазі; - знайти ЛАЧХ послідовної коректуючої ланки, визначити електричну схему та розрахувати її параметри; - симулювати електричну схему у ППП Micro-Cap або Electronic WorkBench 5.x. Нижче приведені: структурна схема (рис. 5.1) системи, вигляд функцій передачі окремих типових динамічних ланок замкнутої системи для варіантів 0…9 завдання (таблиця 5.1), а також таблиця значень параметрів цих елементів, показників якості перехідного процесу з вказаним критерєм стійкості, який має бути застосований при дослідженні динамічних властивостей САУ.
Рисунок 5.1 – Структурна схема системи
Таблиця 5.1 – Функції передачі замкнутої САУ
Таблиця 5.2 – Параметри елементів САУ та її показники якості
При дослідженні стійкості за допомогою різних критеріїв слід пам’ятати, що частина з них відноситься до розімкнутих систем, а інші – до замкнутих. Крім того, треба звернути увагу на відповідну нумерацію коефіцієнтів характеристичного рівняння. При побудові ЛАЧХ і ЛФЧХ треба спочатку побудувати характеристики елементарних ланок, а потім шляхом сумування знайти характеристики систем в цілому. При цьому треба використовувати логарифмічний (ЛАЧХ) та напівлогарифмічний (ЛФЧХ) масштаб. Корекція системи за допомогою послідовної коректуючої ланки є найбільш складним етапом роботи. Ітераційний процес корекції на кожному кроці містить: - побудову бажаної ЛАЧХ, яка здійснюється на основі попередніх знань про зв’язок параметрів цієї ЛАЧХ із варіаціями перехідної характеристики та параметрів якості перехідного процесу; - побудову перехідної функції системи, яка відповідає бажаній ЛАЧХ, за допомогою ПЕОМ; - визначення параметрів tПП і σ% та порівняння їх з вихідним технічним завданням; - завершення процедури або перехід до наступного ітераційного кроку, якщо знайдені параметри не відповідають технічному завданню. ЛАЧХ коректуючої ланки знаходиться як різниця двох ЛАЧХ – після введення і до введення корекції. Після цього за відповідними таблицями визначають її схему і параметри. До пояснювальної записки слід обов’язково включити: - структурну схему системи із позначеннями на ній коректуючої ланки; - ЛАЧХ і ЛФЧХ нескоректованої системи; - бажану ЛАЧХ та перехідну характеристику системи для трьох останніх ітерацій; - принципову електричну схему коректуючої ланки з позначеними на ній узгодженими елементами; - опис та листінги розроблених програм для ПЕОМ, результати розрахунків, знайдені за допомогою цих програм, а також порядок використання та результати роботи з програмами, що були розроблені раніше. Всі розрахунки і необхідні графічні матеріали доцільно виконати у середовищі MatLab 6.0, коректуючих ланок – за допомогою ППП MicroCap або Electronic WorkBench 5.x. Необхідно звернути особливу увагу на правильність використання стандартів ЕСКД та ЕСПД.
Список літератури 1. Теория автоматического управления. Учеб. Для вузов по спец. “Автоматика и телемеханика”. В 2-х ч., ч.1. Теория линейных систем автоматического управления. Под ред. А.А. Воронова, - 2-е изд., перераб. и дополн. – М.: Высшая школа. 1986-167 с., ил. 2. Сав’юк Л.О. Початки програмування у середовищі МаtLab 6.0. основні можливості пакету для аалізу та синтезу лінійних неперервних САУ. Методичні вказівки.-Івано-Франківськ: ІФНТУНГ. 2003 3. Г.Ф.Зайцев, В.К.Стеклов, О.І.Бріцький Теорія автоматичного управління.-Київ: “Техніка”. 2002 – 687 с., іл. 4. Бесекерский В.А., Попов Б.П. Теория систем автоматического регулирования. – М: Наука. 1972-767 с., ил. 5. В.А. Андрущенко. Теория систем автоматического управления: Учеб. Пособие.-Л.: Издательство Ленинградского университета. 1990-256 с., ил. 6. Солодовников В.В., Плотников В.Н., Яковлев А.В. Основы теории и элементы систем автоматического регулирования. Учебное пособие для вузов. –М.: Машиностроение. 1985-536 с., ил. 7. Попович М.Г., Ковальчук О.В. Теорія автоматичного керування: Підручник для студентів вищих технічних закладів освіти.-Київ: “Либідь”.1997-543 с., іл. 8. Скворцов Г.В. Синтез коректирующих устройствсудовых следящих систем. –Л.:Судостроение, 1986-252 с. 9. Потемкин В.Г. Система MatLAB: Справочное пособие. – 10. Потемкин В.Г. MatLAB 5 для студентов: Справ, пособие. – 11. Дьяконов В.П. Справочник по применению системы PC MatLAB. 12. Сав’юк Л.О. Використання сучасних програмних середовищ для створення моделей, аналізу та синтезу САУ при вивченні основ теорії автоматичного управління. Методичний посібник. Частина 1 “Моделювання, аналіз та синтез лінійних САУ у середовищі MatLab 6.0”. – Івано-Франківськ, ІФНТУНГ, 2003.-79с.
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-06-26; просмотров: 231; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.214 (0.009 с.) |

 (4.1)
(4.1)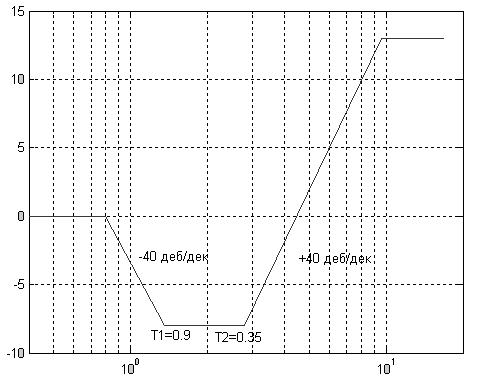
 ;
;  . (4.2)
. (4.2) (Ом);
(Ом);  (Ф).
(Ф).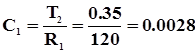 (Ф).
(Ф). (Ом).
(Ом).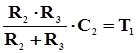 ,
,  (Ом).
(Ом).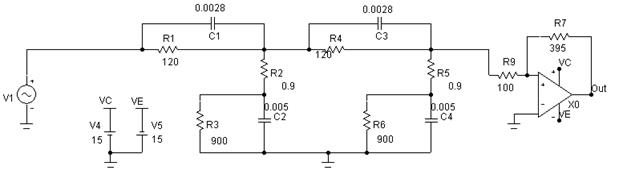
 вказують необхідний діапазон частот для симуляції електричної схеми. У пункті
вказують необхідний діапазон частот для симуляції електричної схеми. У пункті  вкажіть межі графіку по вісі Х. Відповідно у пункті
вкажіть межі графіку по вісі Х. Відповідно у пункті  вказують межі графіку по вісі Y. Слід зауважити, що спочатку вказується верхня границя а потім нижня. Третім числом може бути крок сітки графіку. Всі величини вказуються через кому. В кінці налаштування натискаємо на клавішу Run.
вказують межі графіку по вісі Y. Слід зауважити, що спочатку вказується верхня границя а потім нижня. Третім числом може бути крок сітки графіку. Всі величини вказуються через кому. В кінці налаштування натискаємо на клавішу Run.