
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Використання зовнішніх кіл зміщення нуляСодержание книги
Поиск на нашем сайте 1. Варіант інвертуючого операційного підсилювача Корегування може здійснюватись як по інвертуючому входу, так і по неінвертуючому.
Розглянемо корекцію по інвертуючому входу (див. рис. 3.5). Діапазон регулювання
Зрозуміло, що він не повинен бути меншим за всі систематичні складові адитивної похибки разом взяті:
Рис. 3.5
Як правило R 3 >> R 4. Схема корекції нуля по неінвертуючому входу показана на рис. 3.6. Недоліком попередньої схеми регулювання є необхідність при зміні опорів
Умова для вибору цього параметра лишається такою, як для попередньої схеми – він не повинен бути меншим за всі систематичні складові адитивної похибки разом узяті. Номінали R1,R2,R5,R6 повинні відповідати умовам:
а для мінімізації впливу кола регулювання – R3 >>R5.
Рис. 3.6 2. Варіант неінвертуючого операційного підсилювача Розглянемо варіант малого коефіцієнта підсилення. Схема корекції нуля ОП для цього випадку зображена на рис.3.7.
Рис. 3.7 За умови
Діапазон регулювання становить
і не повинен бути меншим, ніж усі систематичні складові адитивної похибки разом узяті. У разі великого коефіцієнта підсилення доцільно користуватися схемою корекції нуля, показаною на рис. 3.8.
Рис. 3.8 Для того, щоб коло опорного живлення не впливало на загальну похибку, співвідношення опорів повинно задовольняти нерівності:
Діапазон регулювання також повинен забезпечувати повну компенсацію адитивної складової похибки:
Оскільки в цій схемі ОП ввімкнений в неінвертуючому включенні, то при великому коефіцієнті підсилення, як правило, R 1 << R 2. Тому вираз (3.5) набуде такого вигляду:
На рис. 3.9 наведено схему компенсації нуля ОП у схемі повторювача напруги.
Рис. 3.9 В цій схемі для отримання компенсуючої напруги між інвертуючим входом і виходом ОП включений резистор R2, незначний за величиною (<1кОм). Тоді діапазон регулювання напруги зміщення буде дорівнювати:
Треба зауважити, що в цьому випадку зміна вхідної напруги в значних межах відносно нуля буде викликати зміну компенсуючої напруги, однак це не стане причиною значної відносної похибки. Коефіцієнт передачі напруги в цій схемі буде трохи більший за одиницю, оскільки R2 << R1, а коефіцієнт підсилення має розраховуватися за формулою:
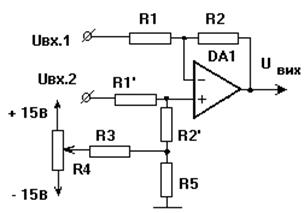
На рис. 3.10 наведено схему компенсації нуля ОП для диференціального підсилювача. В цій схемі насамперед треба зберегти відношення резисторів, що забезпечує пригнічення синфазного сигналу при будь-якому положенні рухомого контакту резистора R4. Тому необхідно виконати наступні співвідношення: R5 << R3, R5<<R2',
Рис. 3.10
Компенсація струмів зміщення Схема компенсації струмів зміщення, наведена на рис. 3.11, дозволяє мінімізувати вплив струмів зміщення на вхідне коло в широкому діапазоні температур. Обидва ОП повинні мати максимально близькі параметри.
Рис. 3.11
Компенсація мультиплікативної похибки Розглянемо схему компенсації мультиплікативної похибки для основних варіантів схем включення ОП (рис 3.12, рис. 3.13). Компенсація в інвертуючому підсилювачі
Рис. 3.12 Коефіцієнт підсилення при виведеному в нульове положення змінному опорі R 2´ відповідає мінімальному значенню і дорівнює
а максимальному:
де R 2' – номінальне значення змінного опору. Найчастіше стабільність змінних опорів значно гірша, ніж постійних опорів кола зворотного зв’язку. Перш за все, вона пов’язана з коливаннями температури зовнішнього середовища. Тому виникає необхідність оцінити вплив нестабільності змінного опору на метрологічні характеристики ВП загалом. Похибка перетворення ОП з урахуванням нестабільності змінного опору
де
|
||
|
|
Последнее изменение этой страницы: 2016-04-21; просмотров: 160; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.41 (0.007 с.) |

 . (3.1)
. (3.1) .
.
 або
або  наприклад при зміні коефіцієнту передачі відновити регулювання нуля. Цього недоліку позбавлена схема на Рис. 3.6 Дійсно, діапазон регулювання напруги зміщення в цій схемі дорівнюватиме:
наприклад при зміні коефіцієнту передачі відновити регулювання нуля. Цього недоліку позбавлена схема на Рис. 3.6 Дійсно, діапазон регулювання напруги зміщення в цій схемі дорівнюватиме: . (3.2)
. (3.2)
 = R 5 + R 6,
= R 5 + R 6,

 коефіцієнт підсилення не залежить від кіл корекції
коефіцієнт підсилення не залежить від кіл корекції . (3.3)
. (3.3) (3.4)
(3.4)
 .
. . (3.5)
. (3.5)

 .
.
 . В цьому випадку діапазон регулювання напруги зміщення буде дорівнювати:
. В цьому випадку діапазон регулювання напруги зміщення буде дорівнювати:


 ,
, , (3.7)
, (3.7) , (3.8)
, (3.8) – відносна похибка дрейфу змінного опору.
– відносна похибка дрейфу змінного опору.


