
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Компенсація в диференціальному підсилювачі ⇐ ПредыдущаяСтр 8 из 8
Особливість компенсації мультиплікативної похибки в диференціальному підсилювачі полягає в тому, що регулювання коефіцієнта підсилення диференціального сигналу не повинно впливати на співвідношення резисторів, що забезпечують компенсацію синфазного сигналу, іншими словами необхідно змінювати два резистори однаково. Через те, що таку вимогу дуже складно реалізувати на практиці, намагаються використати схеми диференціальних підсилювачів, в яких регулювання коефіцієнта підсилення диференціального сигналу відбувається за допомогою зміни лише одного резистора, зміна якого не приводить до порушення синфазних співвідношень. Для схеми (рис. 3.14) вихідна напруга визначається як
Рис. 3.14 Як випливає з виразу (3.11), змінний опір схеми корекції R 4 прямо пропорційно впливає на вихідну напругу Коефіцієнт підсилення диференціального підсилювача можна змінювати і способом, наведеним на рис. 3.15. У цій схемі вихідна напруга визначається як
де
Рис. 3.15 Контрольні питання 1. Поясніть принцип дії внутрішньої корекції нуля ОП. 2. Поясніть принцип дії корекції нуля ОП з використанням зовнішніх кіл. 3. Як компенсуються струми зміщення ОП? 4. Як компенсувати мультиплікативну похибку в схемі неінвертуючого підсилювача? 5. Як компенсувати мультиплікативну похибку в схемі інвертуючого підсилювача? 6. Як компенсувати мультиплікативну похибку в схемі диференціального підсилювача?
ВИСНОВКИ Засвоєння матеріалу, викладеного в цих методичних рекомендаціях, дозволить досконало оволодіти основами проектування різноманітних вимірювальних пристроїв з використанням ОП. Слід зауважити, що коли необхідно зробити приблизний попередній розрахунок схеми з використанням ОП можна обмежитися його ідеальною моделлю та звертати увагу тільки на ті розділи методики розрахунку реального ОП, які найбільш значущі з погляду похибки та режиму функціонування. Для перевірки роботи лінійних моделей схем на ОП ефективним є використання комп’ютерних моделюючих програм, оскільки цей підхід дає змогу заощадити час. Однак треба пам’ятати, що деякі особливості роботи електронної схеми на ОП не можна змоделювати за допомогою згаданих програм. Тому вплив різноманітних чинників можна визначити тільки за допомогою обчислення похибок схем на ОП за його реальними параметрами, а остаточна перевірка відбувається під час дослідження роботи реального зразка виробу чи його макета.
СПИСОК ЛІТЕРАТУРИ 1. Достал И. Операционные усилители. Пер. с анг. – М.: Мир, 1982. – 512 с. 2. Желбаков И.Н. Лекции по курсу “Измерительные преобразователи. Решающие усилители“ – М.: Моск. энерг. ин-т, 1987. – 48 с. 3. Алексеев А.Г. Операционные усилители и их применение. – М.: Радио и связь, 1989. – 120 с. 4. Гутников В.С. Интегральная электроника в измерительных устройствах. – Л.: Энергоатомиздат. Ленинградское отделение, 1988. – 304 с. 5. Матавкин В.В. Быстродействующие операционные усилители. – М.: Радио и связь, 1989. – 128 с. 6. ГОСТ 18421-73. Усилители операционные. Термины и определения. – Введ. 01.01.73. 7. ГОСТ 18421-93. Аналоговая и аналого-цифровая вычислительная техника. Термины и определения. – Введ. 01.01.95.
Додаток Основні характеристики ОПЕРАЦІЙНИХ ПІДСИЛЮВАЧІВ ЗАГАЛЬНОГО ВИКОРИСТАННЯ (ВИРОБНИЦТВА КРАЇН СНД)
Примітка: UЗМ – напруга зміщення, ∆UЗМ – температурний дрейф напруги зміщення, КУ – коефіцієнт підсилення, ІВХ, – вхідний струм, VUвих.max – максимальна швидкість наростання вихідного сигналу, f1(fсрз) – частота зрізу, * – орієнтовні дані, т – типове значення. ЗМІСТ
Вступ............................................................................................ 3 1. ІДЕАЛЬНИЙ ОПЕРАЦІЙНИЙ ПІДСИЛЮВАЧ................. 4 1.1. Еквівалентна схема ідеального операційного 1.2. Аналіз базових схем на операційному підсилювачі......... 6 1.2.1. Інвертуючий підсилювач..................................................... 6 1.2.2. Неінвертуючий підсилювач............................................... 7 1.2.3. Диференціальний підсилювач............................................. 9 1.2.4. Інвертуючий суматор.......................................................... 12 1.2.5. Інтегратор.............................................................................. 13 1.2.6. Диференціатор...................................................................... 16 2. РЕАЛЬНИЙ ОПЕРАЦІЙНИЙ ПІДСИЛЮВАЧ................ 19 2.1. Еквівалентна схема реального операційного 2.2. Параметри реального операційного підсилювача......... 19 2.2.1. Граничнодопустимі параметри............................................ 20 2.2.2. Електричні характеристики............................................. 22 2.3. Розрахунок похибок перетворення сигналів.................... 33 2.3.1. Адитивні похибки................................................................ 33 2.3.2. Мультиплікативні похибки................................................. 39 3. Корекція похибок СХЕМ ВИМІРЮВАЛЬНИХ ПЕРЕТВОРЮВАЧІВ................................................................... 53 3.1. Корекція адитивних похибок схем..................................... 53 3.1.1. Внутрішня корекція нуля операційного підсилювача....... 53 3.1.2. Використання зовнішніх кіл зміщення нуля.....................55 3.1.3. Компенсація струмів зміщення........................................... 60 3.2.Компенсація мультиплікативної похибки........................ 61 3.2.1. Компенсація в інвертуючому підсилювачі................. 61 3.2.2. Компенсація в неінвертуючому підсилювачі.....................62 3.2.3. Компенсація в диференціальному підсилювачі................ 63 ВИСНОВКИ................................................................................. 65 СПИСОК ЛІТЕРАТУРИ........................................................... 66
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-04-21; просмотров: 80; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.140.185.170 (0.009 с.) |
 . (3.11)
. (3.11)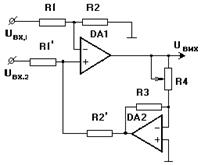
 , що дозволяє ефективно компенсувати мультиплікативну похибку ВП зміною резистора R 4. При цьому співвідношення, яке забезпечує пригнічення синфазного сигналу
, що дозволяє ефективно компенсувати мультиплікативну похибку ВП зміною резистора R 4. При цьому співвідношення, яке забезпечує пригнічення синфазного сигналу 
 , (3.12)
, (3.12) < 1 – коефіцієнт пропорційності змінного опору кола корекції R 3 до номіналу R 2, тобто
< 1 – коефіцієнт пропорційності змінного опору кола корекції R 3 до номіналу R 2, тобто  .
.



