
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Теорема (Кронекера–Капелли).Содержание книги
Поиск на нашем сайте
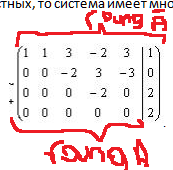
Система линейных уравнений совместна тогда и только тогда, когда ранг основной матрицы системы равен рангу её расширенной матрицы: Для совместной системы линейных уравнений вопрос о её определённости или неопределённости решается с применением следующих теорем. Теорема 1 Если ранг основной матрицы совместной системы равен числу неизвестных, то система является определённой Теорема 2 Если ранг основной матрицы совместной системы меньше числа неизвестных, то система является неопределённой.
1) при 2) при и в случае неопределённости системы найти её базисное решение.Вычислим ранги основной Вторую строку матрицы сложим с её первой строкой, умноженной на К третьей строке этой матрицы прибавим вторую строку, умноженную на удаляя из которой третью и четвёртую строки получим ступенчатую матрицу Таким образом, Неизвестные Думаю с этим все понятно.
Вопрос 6 1. Вектор. Понятия Вектором - называется отрезок, имеющий определенную длину и направление
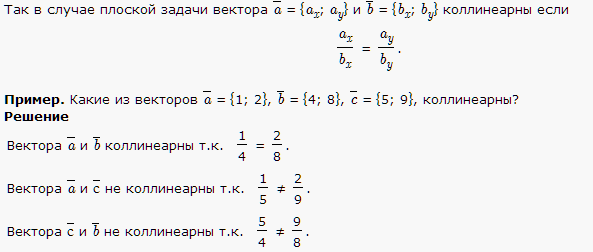
Основные понятия 1) Модулем вектора |a| в геометрии называется его длина 2) Коллинеарными называются такие вектора, векторное произведение которых равно нулю. Это параллельные вектора. Коллинеарные вектора могут быть сонаправленными или встречными, то есть направленными строго в противоположные стороны. 3) Ортогональными (перпендикулярными) называются такие вектора, скалярное произведение которых равно нулю. Для любого вектора все вектора, лежащие в любой перпендикулярной ему плоскости, будут ортогональны. 4) Нулевым является вектор, имеющий нулевую длину, то есть тот, у которого координаты начала и конца строго совпадают. В связи с этим обычно нельзя говорить о направлении такого вектора, поэтому его считают не имеющим направления. 5) Компланарными называются вектора, которые приведены к одному началу и лежат в одной плоскости. Если хотя бы один из 3 векторов – нулевой, то три вектора тоже компланарны. 6) Углом между двумя векторами, отложенными от одной точки, называется кратчайший угол, на который нужно повернуть один из векторов вокруг своего начала до положения сонаправленности с другим вектором. 7) Косинус угла между векторами равен скалярному произведению векторов, поделенному на произведение модулей векторов. 2. Сумма векторов и произведение вектора на число. Ответ: начнем с простого, чтобы сложить два вектора, достаточно сложить каждую из его координат. Т.е. если есть два вектора с координатами: a (x y z) u b (x1 y1 z1) то их суммой будет: (x+x1;y+y1;z+z1). С этим ясно, умножение вектора на число тоже довольно просто. Если есть вектор a(x y z) и число b=4, то просто домножаем КАЖДУЮ координату на это число. 3. Условие коллинеарности векторов: Ответ: 1) Два вектора коллинеарны, если их отношения равны 2) Два вектора коллинеарны, если их векторное пр-е равно нулю. Пример внизу.
4. Свойства линейных операций над векторами Сложение векторов коммутативно: Сложение векторов ассоциативно: Прибавление нулевого вектора к любому не меняет последнего: Для любого вектора Умножение вектора на число ассоциативно:
Дистрибутивность умножения векторов относительно сложения Умножение вектора на число дистрибутивно относительно сложения векторов: Очевидно, умножение на единицу не меняет вектор:
Вопрос 7 1. Базис и система координат на плоскости и в пр-ве Ответ: Базисом плоскости называется пара линейно независимых (неколлинеарных) векторов Также говорят, что вектор 1.1 Система координат на плоскости Ответ: Когда говорят о прямоугольной системе координат, то чаще всего имеют в виду начало координат, координатные оси и размерность по осям. Прямоугольную систему координат вполне можно определить через ортонормированный базис Точка Думаю, всем понятно, что с помощью точки
1.2. Система координат в пр-ве Ответ: Базисом трёхмерного пространства называется тройка линейно независимых (некомпланарных) векторов Напоминаю, также можно сказать, что вектор Понятие системы координат вводится точно так же, как и для плоского случая, достаточно одной точки и любых трёх линейно независимых векторов: Точка
Точка
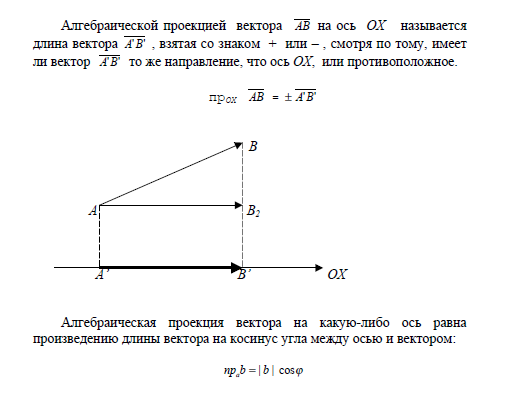
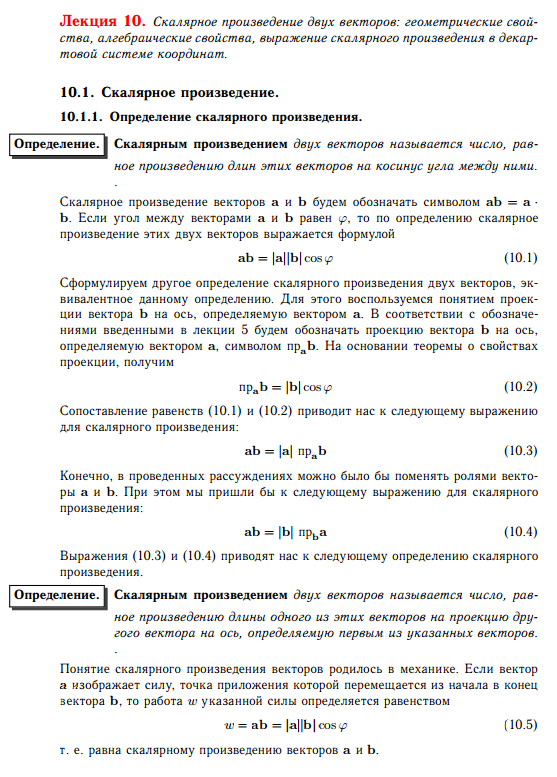
2. Геометрические и алгебраические проекции вектора на ось
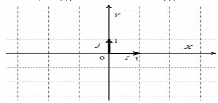
3. Координаты вектора на плоскости и в пространстве Начну с векторов на плоскости. Изображаем декартову с.к. и откладываем единичные вектора.
Векторы
Ответ: Любой вектор Координаты на плоскости. Теперь рассмотрим векторы в трехмерном пространстве, здесь практически всё так же, только добавится ещё одна координата.
Это есть ортонормированный базис
Вопрос 8 1. Направляющие косинусы вектора Ответ: это косинусы углов, которые вектор образует с положительными полуосями координат. Направляющие косинусы однозначно задают направление вектора. Если вектор имеет длину 1, то его направляющие косинусы равны его координатам. Следовательно вывод: направление вектора в пространстве определяется углами, которые вектор образует с осями Косинусы этих углов называются направляющими косинусами вектора:
А находят их так: Далее, это орт, он же единичный вектор который находится ТОЧНО так же, как и направляющие косинусы, разве что вместо cos пишем v с галочкой наверху. 2. Сумму векторов и произведение вектора на число находили выше,
Вопрос 9 Ответ: 1. Нахождение координат вектора, зная начало и конец + координаты середины:
2. Расстояние между двумя точками:
Очень простой вопрос, но тем не менее:
Вопрос 10
Вопрос 11 Три некомпланарных вектора a, b и с, взятые в указанном порядке, образуют правую тройку, если с конца третьего вектора с кратчайший поворот от первого вектора а ко второму вектору b виден совершающимся против часовой стрелки, и левую, если по часовой (см. рис. 16).
Векторным произведением вектора а на вектор b называется вектор с, который: 1. Перпендикулярен векторам a и b, т. е. с^а и с^b;
3.Векторы a, b и с образуют правую тройку.
|
||||||||
|
|
Последнее изменение этой страницы: 2016-04-21; просмотров: 491; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.119.112.22 (0.011 с.) |


 Таким образом, из сформулированных теорем вытекает способ исследования систем линейных алгебраических уравнений. Пусть n – количество неизвестных,
Таким образом, из сформулированных теорем вытекает способ исследования систем линейных алгебраических уравнений. Пусть n – количество неизвестных, 
 Тогда:
Тогда: система несовместн
система несовместн система совместна, причём, если
система совместна, причём, если  , система определённая; если же
, система определённая; если же  , система неопределённая. Определение Базисным решением неопределённой системы линейных уравнений называют такое её решение, в котором все свободные неизвестные равны нулю. Пример. Исследовать систему линейных уравнений
, система неопределённая. Определение Базисным решением неопределённой системы линейных уравнений называют такое её решение, в котором все свободные неизвестные равны нулю. Пример. Исследовать систему линейных уравнений
 и расширенной матриц
и расширенной матриц  данной системы уравнений, для чего приведём расширенную (а вместе с тем и основную) матрицу системы к ступенчатому виду:
данной системы уравнений, для чего приведём расширенную (а вместе с тем и основную) матрицу системы к ступенчатому виду:
 третью строку – с первой строкой, умноженной на
третью строку – с первой строкой, умноженной на  а четвёртую строку – с первой, умноженной на
а четвёртую строку – с первой, умноженной на  получим матрицу
получим матрицу
 а к четвёртой строке – первую, умноженную на
а к четвёртой строке – первую, умноженную на  Врезультате получим матрицу
Врезультате получим матрицу

 Следовательно, данная система линейных уравнений совместна, а поскольку величина ранга меньше числа неизвестных, система является неопределённой. Полученной в результате элементарных преобразований ступенчатой матрице соответствует система уравнений
Следовательно, данная система линейных уравнений совместна, а поскольку величина ранга меньше числа неизвестных, система является неопределённой. Полученной в результате элементарных преобразований ступенчатой матрице соответствует система уравнений
 и
и  являются главными, а неизвестные
являются главными, а неизвестные  и
и  свободными. Придавая свободным неизвестным нулевые значения, получим базисное решение данной системы линейных уравнений:
свободными. Придавая свободным неизвестным нулевые значения, получим базисное решение данной системы линейных уравнений:
 .
. .
. .
. существует вектор
существует вектор  такой, что
такой, что  или
или  .
. . Умножение вектора на число дистрибутивно относительно сложения чисел:
. Умножение вектора на число дистрибутивно относительно сложения чисел:  .
. .
. .
. , взятых в определённом порядке, при этом любой вектор плоскости является линейной комбинацией базисных векторов. Любой вектор плоскости
, взятых в определённом порядке, при этом любой вектор плоскости является линейной комбинацией базисных векторов. Любой вектор плоскости  единственным образом раскладывается по базису
единственным образом раскладывается по базису  , где
, где  – действительные числа. Числа
– действительные числа. Числа  называют разложением вектора
называют разложением вектора  . И это почти так. Формулировка звучит следующим образом:
. И это почти так. Формулировка звучит следующим образом: плоскости, которая называется началом координат, и ортонормированный базис
плоскости, которая называется началом координат, и ортонормированный базис 
 произвольной ненулевой длины. Собственно пример данной системы, всем известной:
произвольной ненулевой длины. Собственно пример данной системы, всем известной:
 , взятых в определённом порядке, при этом любой вектор пространства единственным образом раскладывается по данному базису
, взятых в определённом порядке, при этом любой вектор пространства единственным образом раскладывается по данному базису  , где
, где  – координаты вектора
– координаты вектора  , взятые в определённом порядке, задают аффинную систему координат трёхмерного пространства:
, взятые в определённом порядке, задают аффинную систему координат трёхмерного пространства:
 задают декартову прямоугольную систему координат пространства.:
задают декартову прямоугольную систему координат пространства.: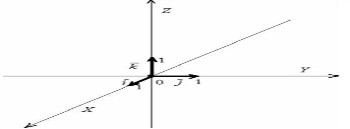
 и
и  ортогональны. Ортогональны = Перпендикулярны. Обозначение: ортогональность векторов записывают привычным значком перпендикулярности, например:
ортогональны. Ортогональны = Перпендикулярны. Обозначение: ортогональность векторов записывают привычным значком перпендикулярности, например:  .Рассматриваемые векторы называют координатными векторами или ортами. Данные векторы образуют базис на плоскости. Иногда построенный базис называют ортонормированным базисом плоскости: «орто» – потому что координатные векторы ортогональны, прилагательное «нормированный» означает единичный, т.е. длины векторов базиса равны единице. Обозначение: базис обычно записывают в круглых скобках, внутри которых в строгой последовательности перечисляются базисные векторы, например:
.Рассматриваемые векторы называют координатными векторами или ортами. Данные векторы образуют базис на плоскости. Иногда построенный базис называют ортонормированным базисом плоскости: «орто» – потому что координатные векторы ортогональны, прилагательное «нормированный» означает единичный, т.е. длины векторов базиса равны единице. Обозначение: базис обычно записывают в круглых скобках, внутри которых в строгой последовательности перечисляются базисные векторы, например:  плоскости единственным образом выражается в виде:
плоскости единственным образом выражается в виде: , где
, где  – числа, которые называются координатами вектора в данном базисе. А само выражение
– числа, которые называются координатами вектора в данном базисе. А само выражение 
 трехмерного пространства и прямоугольная система координат, единичные векторы
трехмерного пространства и прямоугольная система координат, единичные векторы  данного базиса попарно ортогональны:
данного базиса попарно ортогональны:  и
и  . Ось
. Ось  наклонена под углом 45 градусов только для того, чтобы складывалось визуальное впечатление пространства. И в данном случае координаты отдельных векторов будут записывать в соответствии с i j k, и вместо отсутствующих координат будут ставить нули. Например 3j – коорд. Y => вектор b (0 3 0).
наклонена под углом 45 градусов только для того, чтобы складывалось визуальное впечатление пространства. И в данном случае координаты отдельных векторов будут записывать в соответствии с i j k, и вместо отсутствующих координат будут ставить нули. Например 3j – коорд. Y => вектор b (0 3 0). ,
,  ,
,  .
.
 Связь между ними: Это обязательное условие!
Связь между ними: Это обязательное условие!
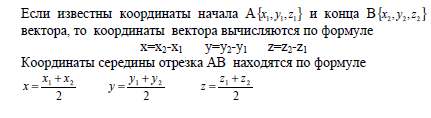

 3. Деление в заданном отношении
3. Деление в заданном отношении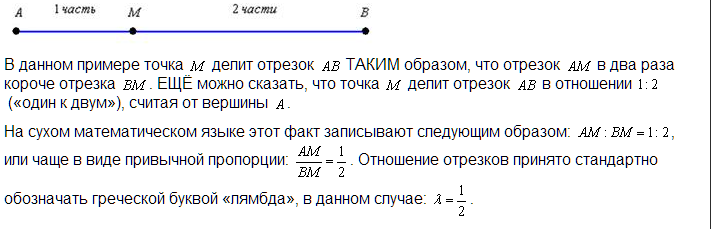


 2. Имеет длину, численно равную площади параллелограмма, построенного на векторах а иb как на сторонах (см. рис. 17), т. е.
2. Имеет длину, численно равную площади параллелограмма, построенного на векторах а иb как на сторонах (см. рис. 17), т. е. 




