
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Поступательное и вращательное движенияСодержание книги
Поиск на нашем сайте
МЕХАНИКА Лекция 1 Механическим движением называют изменение с течением времени положения тел или их частей друг относительно друга.
Материальной точкой называют тело, размерами которого можно пренебречь по сравнению с расстояниями до других тел. К телам больших (по сравнению с массой атомов) масс и малых (по сравнению со скоростью света) скоростей можно считать справедливой ньютоновскую (нерелятивистскую) механику. В этой механике пространство и время абсолютны, т.е. не зависят как друг от друга, так и от присутствующих в пространстве тел.
Рассмотрим движение материальной точки в декартовой системе координат. В момент времени t 1 тело находится в точке 1, положение которой определяется радиус-вектором В системе СИ путь и перемещение имеют размерность – метр. Средняя скорость Средняя путевая скорость Мгновенная скорость или просто скорость Модуль скорости В системе СИ скорость имеет размерность – м/с. В проекциях на координатные оси
В случае плоского движения точки М иногда удобно пользоваться полярными координатами r и φ, где r – расстояние от полюса О до т. М, а φ – полярный угол, отсчитываемый от полярной оси ОА.
Скорость
Причём
Модуль вектора скорости
Ускорение Средним ускорением точки в интервале времени от t до t+Δt называется вектор
Ускорением называется векторная величина
При разложении вектора
Модуль вектора ускорения
В общем случае траектория материальной точки представляет собой не плоскую, а пространственную кривую. Для такой кривой вводится понятие соприкасающейся плоскости. Соприкасающейся плоскостью в произвольной точке М кривой называется предельное положение плоскости, проходящей через любые три точки кривой, когда эти точки неограниченно приближаются к точке М. Вектор ускорения точки лежит в соприкасающейся плоскости, проведённой в рассматриваемой точке М траектории, и направлен в сторону вогнутости траектории В.С. В этой плоскости вектор ускорения можно разложить на две взаимно перпендикулярные составляющие
Если
Составляющая
Тангенциальное (касательное) ускорение характеризует быстроту изменения модуля вектора скорости точки, а нормальное (центростремительное) ускорение характеризует быстроту изменения направления вектора скорости точки.
Твёрдого тела Поступательным движением твёрдого тела называется такое его движение, при котором любая прямая, жёстко связанная с телом (например, прямая АВ) перемещается, оставаясь параллельной своему первоначальному направлению.
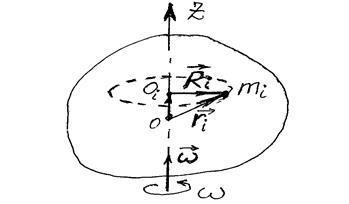
При поступательном движении твёрдого тела все его точки имеют одинаковые скорости, а следовательно и одинаковые ускорения. Кинематическое рассмотрение поступательного движения твёрдого тела сводится к изучению движения любой из его точек. В динамике обычно рассматривают движение центра масс тела. Твёрдое тело, свободно движущееся в пространстве, имеет три поступательные степени свободы, соответствующие его поступательным перемещениям вдоль трёх осей координат. Вращением (или вращательным движением) называется такое движение твёрдого тела, при котором хотя бы две его точки А и В остаются неподвижными. Неподвижная прямая АВ называется осью вращения тела. При вращении вокруг неподвижной оси все точки описывают окружности, центры которых лежат на оси вращения. Твёрдое тело, вращающееся вокруг неподвижной оси, имеет одну степень свободы. Угловой скоростью называют вектор Вращение тела называют равномерным, если Периодом вращения – Т называют промежуток времени, в течение которого тело, равномерно вращаясь с угловой скоростью Движение твёрдого тела, при котором одна из его точек остаётся неподвижной, называют вращением тела вокруг неподвижной точки. Обычно эту точку принимают за начало координат неподвижной системы отсчёта. В каждый момент времени это движение тела можно рассматривать как вращение вокруг некоторой оси, проходящей через неподвижную точку и называемой мгновенной осью вращения ОО ’.
Скорость произвольной точки М тела равна
Тело может совершать три независимых движения – вращаться вокруг каждой из трёх взаимно перпендикулярных осей, проходящих через точку О (имеет три степени свободы). Для характеристики быстроты изменения вектора угловой скорости тела при неравномерном вращении тела вокруг неподвижной оси или при его вращении вокруг неподвижной точки вводится вектор углового ускорения тела.
Проекция углового ускорения на неподвижную ось вращения OZ равна
где ωz – проекция на ту же ось вектора Ускорение
Если тело вращается вокруг неподвижной оси OZ, то вращательное ускорение точки М совпадает с её тангенциальным (касательным) ускорением
Всякое сложное движение твёрдого тела можно разложить на два простых движения: поступательное со скоростью центра масс
Свободное твёрдое тело имеет 6 степеней свободы: 3 степени свободы поступательного движения и 3 степени свободы вращательного движения. Простейший случай сложного движения тела – плоскопараллельное движение, при котором все точки тела движутся в параллельных плоскостях (например, цилиндр, скатывающийся с горки).
Преобразования Галилея Лекция 2 Силы
Силой называется векторная величина, характеризующая воздействия на рассматриваемое тело со стороны других тел, в результате которых рассматриваемое тело получает ускорение или деформируется. В современной физике различают четыре вида взаимодействий: 1) гравитационное; 2) электромагнитное; 3)сильное или ядерное (обеспечивающее связь частиц в атомном ядре); 4) слабое (наблюдается при распаде элементарных частиц).
В рамках классической механики имеют дело с гравитационными и электромагнитными силами. Упругие силы и силы трения определяются характером взаимодействия между молекулами вещества и по своей природе являются электромагнитными. Сила гравитационного притяжения, действующая между двумя материальными точками (или между телами сферической формы), в соответствии с законом всемирного тяготения пропорциональна произведению масс точек т1 и т2 , обратно пропорциональна квадрату расстояния r между ними и направлена по прямой, соединяющей эти точки (или центры тел сферической формы):
Однородная сила тяжести: В отличие от силы тяжести вес тела
Упругая сила – сила пропорциональная смещению материальной точки из положения равновесия и направленная к положению равновесия:
k – коэффициент упругости тела. Для растяжения (сжатия) пружины или стержня в соответствии с законом Гука Сила трения скольжения, возникающая при скольжении данного тела по поверхности другого тела:
N – сила нормального давления, прижимающая трущиеся поверхности друг к другу. Сила Сила сопротивления среды, действующая на тело при его поступательном движении в газе или жидкости. Эта сила зависит от скорости тела
k – положительный коэффициент, характерный для данного тела и данной среды.
Первый закон механики – закон инерции Галилея-Ньютона: существует такая система отсчёта, относительно которой свободная материальная точка движется прямолинейно и равномерно. или. как говорят, по инерции, если на неё не воздействуют другие тела или воздействие других тел скомпенсировано. Такую систему отсчёта называют инерциальной. Второй закон Ньютона: произведение массы материальной точки на её ускорение равно действующей на неё силе:
Если тела, являющиеся источниками сил, не влияют друг на друга и поэтому не меняют своего состояния от присутствия других тел, то сила, действующая на рассматриваемое тело, называется равнодействующей:
Третий закон Ньютона: силы, с которыми две материальные точки действуют друг на друга, всегда равны по модулю и направлены в противоположные стороны вдоль прямой, соединяющей эти точки:
При скоростях тел, значительно меньших скорости света 2-й и 3-й законы Ньютона выполняются с очень большой точностью во всех инерциальных системах отсчёта (говорят, что уравнение
Основное уравнение динамики
Скорость изменения импульса Векторную величину Изменение импульса материальной точки равно импульсу действующей на неё силы.
При рассмотрении системы материальных точек, которые могут взаимодействовать как между собой (внутренние силы), так и с телами, не входящими в данную систему (внешние силы) вводится понятие импульса системы, равного векторной сумме импульсов её отдельных частиц:
Как и в случае с одной частицей приращение импульса системы за конечный промежуток времени t
Закон сохранения импульса: импульс замкнутой системы тел остаётся постоянным
Замкнутой (или изолированной) называют систему тел, на которую не действуют никакие посторонние тела или импульсы внешних сил пренебрежимо малы. Импульсы отдельных частей замкнутой системы могут меняться со временем, однако эти изменения всегда происходят так, что приращение импульса одной части системы равно убыли импульса оставшейся части системы. Импульс может сохраняться и у незамкнутой системы при условии, что результирующая всех внешних сил равна нулю. У незамкнутой системы может сохраняться не сам импульс Центр масс.
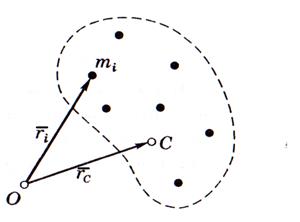
Центром масс системы материальных точек (частиц) называется точка С, положение которой относительно начала системы отсчёта характеризуется радиусом-вектором
т – масса всей системы частиц. Если в пределах данной системы поле силы тяжести можно считать однородным, то центр масс системы совпадает с её центром тяжести. Скорость центра масс системы Уравнение движения центра масс Если центр масс системы движется равномерно и прямолинейно, то это означает, что её импульс сохраняется в процессе движения
Ц-система Систему отсчёта, жёстко связанную с центром масс и перемещающуюся поступательно по отношению к инерциальным системам отсчёта, называют системой центра масс или, кратко, Ц-системой. Полный импульс системы частиц в Ц-системе всегда равен нулю, т.к. в этой системе Система из двух частиц: т1; т2 – массы частиц;
Тогда
Учитывая, что
Получаем
Лекция 3 Движения Выражение 2-ого закона Ньютона
Рассмотрим вращение твёрдого тела вокруг оси OZ.
Момент импульса твёрдого тела относительно начала координат (точки О)
Вектор
Тогда
Если тело в процессе вращения не деформируется, то
Для замкнутой (изолированной) системы момент внешних сил МВНЕШН всегда равен нулю, так как на неё внешние силы не действуют. Поэтому из основного закона динамики вращательногодвижения (закона изменения момента импульса) вытекает закон сохранения момента импульса:
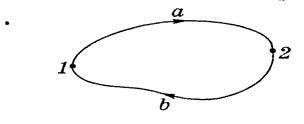
Лекция 4 Консервативные силы Силу, действующую на материальную точку, называют консервативной или потенциальной, если работа этой силы зависит только от начального и конечного положения материальной точки. Работа консервативной силы не зависит ни от вида траектории точки между её начальным (1) и конечным (2) положениями, ни от закона движения точки по траектории
Работа консервативной силы на произвольной замкнутой траектории l точки её приложения равна нулю
Существуют силы, которые не принято называть консервативными, хотя они и удовлетворяют условиям для консервативных сил. Это силы, зависящие от скоростей материальных точек и направленные перпендикулярно этим скоростям. Работа таких сил, часто называемых гироскопическими силами, всегда равна нулю независимо от того, как движутся материальные точки, к которым они приложены. Например, сила Лоренца, действующая со стороны магнитного поля на движущуюся в нём заряженную частицу.
К числу неконсервативных сил относятся, например, силы трения и сопротивления движению в какой-либо среде. Работа этих сил зависит от пути между начальным и конечным положениями частицы (и не равна нулю на любом замкнутом пути).
Потенциальная энергия
Работа А 1-2, совершаемая консервативными (потенциальными) силами при изменении конфигурации системы, т.е. расположения её частей (материальных точек) относительно системы отсчёта, не зависит от того, как конкретно осуществляется процесс перехода из начальной конфигурации системы (1) в конечную (2). Работа А 1-2 полностью определяется начальной и конечной конфигурациями системы. Следовательно, её можно представить в виде разности значений некоторой функции конфигурации системы W, называемой потенциальной энергией системы: A 1-2 = W 1 – W 2.
Элементарная работа потенциальных сил при малом изменении конфигурации системы:
Потенциальную энергию системы можно найти только с точностью до произвольного постоянного слагаемого. В каждой конкретной задаче для получения однозначной зависимости W от конфигурации системы выбирают нулевую конфигурацию, в которой потенциальную энергию системы полагают равной нулю. Таким образом, потенциальной энергией механической системы называется величина, равная работе, которую совершают все действующие на систему консервативные силы при переводе системы из рассматриваемого состояния в состояние, соответствующее её нулевой конфигурации. Рассмотрим простейшую механическую систему, состоящую из одной материальной точки, на которую действует консервативная сила
Откуда следует:
Вектор, стоящий в скобках и построенный с помощью скалярной функции W называется градиентом функции W и обозначается Итак
Пример 1. Потенциальная энергия материальной точки в однородном поле силы тяжести.
h – высота подъёма тела над поверхностью Земли; W0 = 0 на поверхности Земли.
Пример 2. Потенциальная энергия упруго деформируемого тела.
Пример 3. Потенциальная энергия материальной точки в поле центральных сил. Силы, действующие на материальную точку, называются центральными, если они зависят только от расстояния между материальной точкой и некоторой неподвижной точкой – центром силы – и направлены всюду от центра силы либо всюду к центру силы. Если центр силы принять за начало координат, то центральная сила
Для сил отталкивания Для сил притяжения Докажем, что поле центральных сил потенциально:
Найдём потенциальную энергию материальной точки:
Обычно полагают, что
а ) для гравитационного поля материальной точки или однородного шара М – масса материальной точки или однородного шара, создающих гравитационное поле; т – масса материальной точки, находящейся в рассматриваемом поле.
б) для электростатического поля точечного электрического заряда или равномерно заряженных шара или сферы
Механической энергией системы называют величину Е, равную сумме кинетической и потенциальной энергий системы:
E = K + W. Изменение механической энергии системы равно алгебраической сумме работ всех неконсервативных сил, действующих на систему, и изменения потенциальной энергии системы за рассматриваемый промежуток времени, обусловленного нестационарностью внешних консервативных сил
Если система замкнута то
Закон сохранения механической энергии: механическая энергия замкнутой системы не изменяется, если все внутренние силы консервативные (потенциальные) либо не совершают работы (например, силы трения покоя и гироскопические силы работы не совершают). Лекция 5 Колебания Колебаниями называются процессы (движения или изменения состояния), в той или иной степени повторяющиеся во времени. Колебания называются периодическими если значения всех физических величин, характеризующих колебательную систему и изменяющихся при её колебаниях, повторяются через равные промежутки времени. Т 0 – период колебаний (наименьший промежуток времени, удовлетворяющий этому условию);
Гамоническими называют периодические колебания величины
Первая и вторая производные по времени от гармонически колеблющейся величины
Амплитуды Разность фаз колебаний Величина Сравнивая значения S и
Общее решение этого уравнения:
А 1 и А 2 – произвольные постоянные интегрирования, определяемые из начальных условий A 2 = S (0); A 1 = Общее решение можно привести к виду
Физическая величина S совершает гармонические колебания в том и только в том случае, если она удовлетворяет дифференциальному уравнению гармонических колебаний
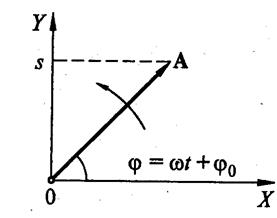
Векторная диаграмма. Гармонические колебания можно изобразить графически с помощью вращающегося вектора на плоскости, модуль которого равен амплитуде А колебаний.
Вектор А равномерно вращается вокруг точки О с угловой скоростью
Лекция 6 Вынужденные колебания
Переменная внешняя сила, приложенная к системе и вызывающая её вынужденные механические колебания, называется вынуждающей или возмущающей. Дифференциальное уравнение вынужденных колебаний гармонического осциллятора
т – масса маятника. Пусть Тогда
Опыт показывает, что по истечении некоторого времени после начала действия вынуждающей силы в системе устанавливаются гармонические колебания с частотой вынуждающей силы, но отстающие от этой силы на φ
Для определения значений А и φ запишем
и подставим в дифференциальное уравнение колебаний
|
||||
|
|
Последнее изменение этой страницы: 2016-04-19; просмотров: 392; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.146.107.152 (0.016 с.) |

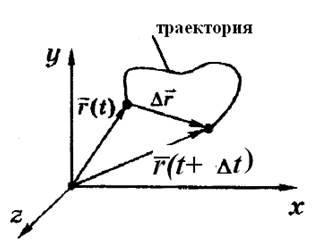 Совокупность неподвижных друг относительно друга тел, по отношению к которым рассматривается движение и время, отсчитываемое часами, называется системой отсчёта. Для количественного описания движения систему отсчёта связывают с какой либо системой координат (декартовой, полярной, сферической и т.д.).
Совокупность неподвижных друг относительно друга тел, по отношению к которым рассматривается движение и время, отсчитываемое часами, называется системой отсчёта. Для количественного описания движения систему отсчёта связывают с какой либо системой координат (декартовой, полярной, сферической и т.д.). . За промежуток времени Δ t тело проходит в точку 2. Расстояние Δ S между точками 1 и 2, отсчитываемое вдоль траектории, называется путём между этими точками. Отрезок прямой, проведённый из начального положения в конечное, называется перемещением. Перемещение совпадает с приращением радиус-вектора
. За промежуток времени Δ t тело проходит в точку 2. Расстояние Δ S между точками 1 и 2, отсчитываемое вдоль траектории, называется путём между этими точками. Отрезок прямой, проведённый из начального положения в конечное, называется перемещением. Перемещение совпадает с приращением радиус-вектора  .
. .
. .
. -вектор, направленный по касательной к траектории в данной точке.
-вектор, направленный по касательной к траектории в данной точке. .
. , где
, где - единичные векторы (орты), направленные вдоль соответствующих осей.
- единичные векторы (орты), направленные вдоль соответствующих осей. , где
, где  .
. .
.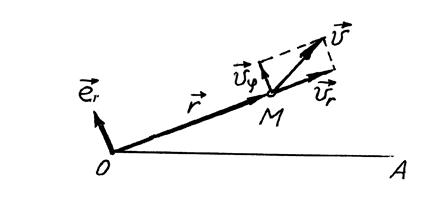
 точки М можно разложить на две взаимно перпендикулярные составляющие – радиальную скорость
точки М можно разложить на две взаимно перпендикулярные составляющие – радиальную скорость  и трансверсальную скорость
и трансверсальную скорость 
 .
.
 – полярный радиус-вектор точки М,
– полярный радиус-вектор точки М, – единичный вектор, направленный перпендикулярно к плоскости движения точки так, что из его конца вращение вектора
– единичный вектор, направленный перпендикулярно к плоскости движения точки так, что из его конца вращение вектора  точки М, совершающей плоское движение,
точки М, совершающей плоское движение, .
. .
. , равная первой производной по времени от скорости
, равная первой производной по времени от скорости  .
.

 .
. .
. – касательное или тангенциальное ускорение точки.
– касательное или тангенциальное ускорение точки. , где
, где  – единичный вектор касательной, проведённый в т.М траектории в направлении скорости
– единичный вектор касательной, проведённый в т.М траектории в направлении скорости  .
. , то движение называется равнопеременным. При равнопеременном движении модуль скорости точки зависит от времени линейно:
, то движение называется равнопеременным. При равнопеременном движении модуль скорости точки зависит от времени линейно: .
. называется нормальным или центростремительным ускорением точки.
называется нормальным или центростремительным ускорением точки. , где
, где  – единичный вектор главной нормали, а R – радиус кривизны траектории.
– единичный вектор главной нормали, а R – радиус кривизны траектории.
 , который численно равен
, который численно равен  (
( – угол поворота тела вокруг оси) и направлен вдоль неподвижной оси так, чтобы из его конца вращение твёрдого тела было видно происходящим против часовой стрелки (правило правого винта).
– угол поворота тела вокруг оси) и направлен вдоль неподвижной оси так, чтобы из его конца вращение твёрдого тела было видно происходящим против часовой стрелки (правило правого винта). . В этом случае
. В этом случае  .
. , совершает один оборот вокруг оси вращения.
, совершает один оборот вокруг оси вращения. 


 ,
, .
. произвольной точки М тела, вращающегося вокруг точки О или неподвижной оси, проходящей через эту точку, называют линейным ускорением.
произвольной точки М тела, вращающегося вокруг точки О или неподвижной оси, проходящей через эту точку, называют линейным ускорением. , где
, где – вращательное ускорение точки;
– вращательное ускорение точки; – осестремительное ускорение точки, направленное к мгновенной оси вращения.
– осестремительное ускорение точки, направленное к мгновенной оси вращения. , а осестремительное – с нормальным (центростремительным) ускорением
, а осестремительное – с нормальным (центростремительным) ускорением 
 .
. и вращение вокруг мгновенной оси, проходящей через центр масс. Скорость произвольной точки М тела
и вращение вокруг мгновенной оси, проходящей через центр масс. Скорость произвольной точки М тела , где
, где – радиус вектор точки М;
– радиус вектор точки М; – радиус вектор центра масс.
– радиус вектор центра масс.
 .
. – это сила, с которой тело действует на опору или подвес.
– это сила, с которой тело действует на опору или подвес. , где
, где – ускорение свободного падения;
– ускорение свободного падения; – ускорение тела вместе с опорой относительно Земли.
– ускорение тела вместе с опорой относительно Земли. , где
, где – радиус вектор, характеризующий смещение частицы из положения равновесия;
– радиус вектор, характеризующий смещение частицы из положения равновесия; , где
, где  – величина упругой деформации.
– величина упругой деформации. , где
, где
 – коэффициент трения скольжения, зависящий от природы и состояния соприкасающихся поверхностей;
– коэффициент трения скольжения, зависящий от природы и состояния соприкасающихся поверхностей; направлена в сторону, противоположную направлению движения данного тела относительно другого.
направлена в сторону, противоположную направлению движения данного тела относительно другого. относительно среды, причём направлена противоположно вектору
относительно среды, причём направлена противоположно вектору  , где
, где
 или
или  , где
, где – сила, с которой действовало бы на данную материальную точку i- е тело в отсутствии других тел (принцип суперпозиции).
– сила, с которой действовало бы на данную материальную точку i- е тело в отсутствии других тел (принцип суперпозиции).
 инвариантно относительно преобразований Галилея).
инвариантно относительно преобразований Галилея).
 материальной точки равна равнодействующей силе, приложенной к этой точке.
материальной точки равна равнодействующей силе, приложенной к этой точке. называют элементарным импульсом силы
называют элементарным импульсом силы  за малое время dt её действия.
за малое время dt её действия.
 .
. , где
, где – результирующая всех внешних сил.
– результирующая всех внешних сил.
 , а его проекция рх на некоторое направление ОХ. Это бывает тогда, когда проекция результирующей внешней силы
, а его проекция рх на некоторое направление ОХ. Это бывает тогда, когда проекция результирующей внешней силы  на направление Х равна нулю.
на направление Х равна нулю.
 – масса и радиус-вектор i -ой частицы;
– масса и радиус-вектор i -ой частицы; .
. т.е. центр масс любой системы частиц движется так, как если бы вся масса системы была сосредоточена в этой точке и к ней были бы приложены все внешние силы. При этом ускорение центра масс совершенно не зависит от точек приложения внешних сил.
т.е. центр масс любой системы частиц движется так, как если бы вся масса системы была сосредоточена в этой точке и к ней были бы приложены все внешние силы. При этом ускорение центра масс совершенно не зависит от точек приложения внешних сил. .
. = 0. (Любая система частиц как целое покоится в своей Ц-системе.
= 0. (Любая система частиц как целое покоится в своей Ц-системе.
 – скорости частиц в Ц-системе;
– скорости частиц в Ц-системе; – импульсы частиц в Ц-системе;
– импульсы частиц в Ц-системе; – скорость Ц-системы относительно К-системы отсчёта.
– скорость Ц-системы относительно К-системы отсчёта. .
.
 т.е.
т.е. .
. можно преобразовать, умножив левую и правую часть на
можно преобразовать, умножив левую и правую часть на  :
: или
или  или
или
 .
. перпендикулярен оси
перпендикулярен оси  , а вектор
, а вектор  направлен вдоль оси OZ. Таким образом,
направлен вдоль оси OZ. Таким образом,  или
или
 .
. и
и или
или , где
, где – проекция вектора углового ускорения
– проекция вектора углового ускорения  на ось вращения OZ.
на ось вращения OZ. и
и  .
. .
.
 .
. .
.
 или
или
 или
или .
. .
. , где
, где – оператор набла.
– оператор набла. ;
;
 .
. по закону Гука;
по закону Гука; при х = 0 (для недеформированного тела);
при х = 0 (для недеформированного тела); – деформация (удлинение или сжатие деформируемого тела).
– деформация (удлинение или сжатие деформируемого тела).
 .
. , где
, где – радиус вектор, проведённый из центра силы в рассматриваемую точку поля;
– радиус вектор, проведённый из центра силы в рассматриваемую точку поля; – расстояние от точки до центра силы;
– расстояние от точки до центра силы; – проекция силы
– проекция силы  на радиус-вектор
на радиус-вектор  ;
; .
. т.к.
т.к.  и
и .
. .
. . Тогда
. Тогда .
. , где
, где .
. .
. .
. .
. .
. – частота колебаний;
– частота колебаний; – циклическая (круговая) частота (в электротехнике
– циклическая (круговая) частота (в электротехнике  называют угловой частотой).
называют угловой частотой). , если
, если или
или где
где 
 – амплитуда колебаний;
– амплитуда колебаний; – фаза колебаний;
– фаза колебаний; – начальная фаза колебаний
– начальная фаза колебаний 


 и
и  соответственно равны
соответственно равны  и
и  .
. (величина
(величина  .
. .
. , где
, где .
. , где
, где и
и  .
. , где
, где  .
.
 , равной циклической частоте
, равной циклической частоте .
. , где
, где – переменная внешняя сила, действующая вдоль оси ОХ;
– переменная внешняя сила, действующая вдоль оси ОХ; (простейший случай переменной силы).
(простейший случай переменной силы). , где
, где .
. .
.
 Учитывая фазовые сдвиги между
Учитывая фазовые сдвиги между  , представим это ра
, представим это ра 


