Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Nondeterm minimax(position,position,mark)Содержание книги
Поиск на нашем сайте %обчислення найкращого ходу і мінімаксної оцінки для певної позиції nondeterm best(position_list,position,mark) %вибір зі списку позицій-кандидатів найкращої позиції % mark – оцінка найкращої позиції Choice(position,mark,position,mark,position,mark) % вибір або першої, або другої позиції % залежно від ходу гравця чи противника Clauses Minimax(Pos,BestPos,O):- turns(Pos, PosList),!, %PosList – список дозволених ходів best(PosList, BestPos, O); stat_o(Pos,O). %Pos не має продовжень best([Pos],Pos,O):- minimax(Pos,_,O),!. best([Pos1|PosList],BestPos,BestO):- minimax(Pos1,_,O1), Best(PosList,Pos2,O2), Choice(Pos1,O1,Pos2,O2,BestPos,BestO). Choice(Pos0,O0,Pos1,O1,Pos0,O0):- min_turn(Pos0), O0<O1,!; max_turn(Pos0), O0>O1,!. Choice(Pos0,O0,Pos1,O1,Pos1,O1). turns(a, [b,c]). turns(b, [d,e]). turns(c, [f,g]). turns(d, [h,i]). turns(e, [j,k]). turns(f, [l,m]). turns(g, [n,o]). max_turn(b). max_turn(c). max_turn(h). max_turn(i). max_turn(j). max_turn(k). max_turn(l). max_turn(m). max_turn(n). max_turn(o) min_turn(d). min_turn(e). min_turn(f). min_turn(g). stat_o(h,1). stat_o(i,4). stat_o(j,5). stat_o(k,6). stat_o(l,2). stat_o(m,1). stat_o(n,1). stat_o(o,1). Goal Minimax(a, X, M).
Наведена програма на запит minimax(a, X, M), як і слід сподіватися, дає відповідь X=b, M=4, тобто найкращий хід із позиції а є a-b, а оцінка цього ходу і всієї позиції а – 4. Основне відношення цієї програми – minimax(Pos, BestPos, O), де O – мінімаксна оцінка позиції Pos; BestPos – найкраща позиція-наступник позиції Pos (найкращий хід, який дозволяє досягнути оцінки О). Відношення Turns(Pos, PosList) задає дозволені ходи гри: PosList – це список дозволених позицій-наступників позиції Pos. Передбачено, що ціль turns має неуспіх, якщо Pos є термінальною пошуковою позицією (листком дерева пошуку). Відношення Best(PosList, BestPos, O) вибирає зі списку позицій-кандидатів PosList найкращу позицію BestPos. О – оцінка позиції BestPos і відповідно позиції Pos. Під найкращою оцінкою в цьому записі розуміють або максимальну, або мінімальну оцінку, залежно від того, з якого боку можливий хід.
Реалізація деяких методів пошуку в просторі станів У мові Пролог
Простір станів у мові Пролог можна подати як відношення after(x, y). Наприклад, якщо простір станів можна зобразити у вигляді дерева, показаного на рис. 12, то його записують таким чином:
after(a,b). after(b,c). after(a,d). After(d,e).
Рис. 12. Приклад дерева
Пошук углиб реалізований у мові Пролог за допомогою такої ідеї. Для того щоб знайти шлях Solution із певної вершини A в деяку цільову вершину, необхідно: - якщо A – цільова вершина, то встановити Solution = A; - якщо для вихідної вершини A існує вершина-наступник A1, така що можна провести шлях Solution1 із A1 у цільову вершину, то встановити Solution = [A | Solution1]. Мовою Пролог це правило записують так: solve(A, [A]):- Destination(A). solve(A, [A|Solution]):- After(A, A1), Solve(A1, Solution).
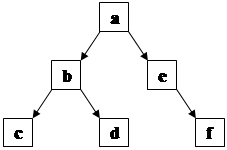
Ця програма має недолік – вона може зациклитися, якщо в просторі станів є цикли. Для її вдосконалення треба додати механізм виявлення циклів. Пошук ушир програмувати більш складно, ніж пошук углиб, тому що доводиться зберігати всю множину вершин-кандидатів, а не тільки одну. Крім того, якщо нам треба знайти розв’язувальний шлях, то однієї множини вершин недостатньо. Тому будемо зберігати не множину вершин-кандидатів, а множину шляхів-кандидатів. Простір станів у цьому випадку зручно подавати за допомогою відношення children(x, [y, z]). Наприклад, для дерева, наведеного на рис. 13, можна записати таке:
children(a, [b, e]). children(b, [c, d]). children(e, [f]).
Рис. 13. Приклад дерева
Знайдемо відношення пошуку вшир breadth_star(Roads, Answer). Це відношення буде істинним, якщо існує шлях із множини кандидатів Roads, який можна продовжити до цільової вершини. Цей продовжений шлях і є Answer. У розглядуваній реалізації множина шляхів-кандидатів буде подана як список шляхів, а кожен шлях – як список вершин, перерахованих у зворотному порядку, тобто головою списку буде остання з породжених вершин. Пошук починається з одноелементної множини кандидатів [[Start]]. Загальні принципи пошуку вшир такі. Для того щоб виконати пошук ушир за заданої множини шляхів-кандидатів, необхідно: - якщо голова першого шляху – цільова вершина, то взяти цей шлях як розв’язок; - у противному разі видалити перший шлях із множини кандидатів і створити множину всіх можливих продовжень цього шляху на один крок; множину продовжень додати в кінець множини шляхів-кандидатів, а потім виконати пошук ушир з отриманою новою множиною. Подана нижче програма реалізує цей алгоритм. breadth_first(Start,Answer):- breadth_star([[Start]], Answer). breadth_star([[H|Road]|_], [H|Road]):- Destination(H). breadth_star([[H|T]|Roads], Answer):- children(H, Children), make_road(Children, [H|T], Child_Roads), append1(Roads, Child_Roads, New_Roads),!, breadth_star(New_Roads, Answer). breadth_star(Roads, Answer). % випадок, якщо у Н немає наступника
Множину продовжень шляху породжують два відношення – children(H, Children) і make_road(Children, [H|T], Child_Roads), перше відношення спочатку породжує список вершин-наступників Children вершини H, а друге – список шляхів-спадкоємців Child_Roads, які ведуть із вершини H. Предикат make_road можна реалізувати так:
make_road([], _, []). make_road([H|T], L, [New_L|T1]):- append([H], L, New_L), make_road(T, L,T1).
Предикат append1(Roads, Child_Roads, New_Roads) додає множину шляхів-продовжень у кінець множини шляхів-кандидатів:
append1([],L,L). append1([X|L1],L2,[X|L3]):- Append1(L1,L2,L3).
Якщо у вершини H немає вершин-наступників і відношення children(H, Children) неуспішне, відбувається альтернативний запуск процедури breadth_star(Roads, Answer). Завдання 3 А. Розв’язати задачу про комівояжера, застосовуючи нижчевказані методи пошуку. Б. Розв’язати задачу про туриста, застосовуючи зазначені нижче методи пошуку. 1. Метод перебору. 2. Метод пошуку в глиб. 3. Метод пошуку в шир. 4. Метод найкоротшого шляху. 5. Метод Мура. 6. Метод Дейкстри. 7. Метод гілок і меж. 8. Метод Нільсона.
|
||||||||
|
|
Последнее изменение этой страницы: 2016-04-08; просмотров: 372; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.214 (0.006 с.) |