
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
О.А. Шипилова, Н.И. Миндиярова, Е.Ю. Москвина.Содержание книги Поиск на нашем сайте
Ш 63 Проектирование кулачковых механизмов: у чебно-методическое пособие по курсовому проектированию по дисциплине «Теория механизмов и машин» для студентов специальностей 151001 «Технология машиностроения», 130602 «Машины и оборудование нефтяных и газовых промыслов» очной, заочной и очно-заочной форм обучения. – Альметьевск: Альметьевский государственный нефтяной институт, 2009. – 36 с.
В методическом пособии «Проектирование кулачковых механизмов» приведены общие сведения о кулачковых механизмах и критерии их работоспособности. Изложен метод графического интегрирования. Дана методика решения задач динамического и кинематического синтеза кулачковых механизмов трех типов. Печатается по решению учебно-методического совета АГНИ.
Рецензенты: Доцент кафедры «НГО», к.т.н. Бикбулатова Г.И. Инженер «СМП-Нефтегаз», к.ф.-м.н. Мирсаитов Р.Г.
© Альметьевский государственный нефтяной институт, 2009 Содержание. Введение ………………………………………………………………………………41. Исходные данные, основные требования и этапы проектирования….………..4 2. Типы кулачковых механизмов…………..……………………………………….5 3. Циклограмма работы кулачкового механизма………………..………………...7 4. Угол давления и угол передачи движения………………………………………8 5. Графическое интегрирование………………….………………………………..10 6. Рекомендуемые масштабы величин…………………........................................13 7. Зависимость между масштабами линейных и угловых путей, скоростей и ускорений толкателя при графическом интегрировании….…………………..15 8. Симметричные и несимметричные диаграммы толкателя……………………17 9. Динамический синтез кулачковых механизмов типа I………………………..19 10. Динамический синтез кулачковых механизмов типа II……………………...21 11. Динамический синтез кулачковых механизмов типа III…………………….23 12. Метод обращения движения (инверсии)………………………………….….27 13. Кинематический синтез кулачковых механизмов типа I……………………27 14. Кинематический синтез кулачковых механизмов типа II…………………..32 15. Кинематический синтез кулачковых механизмов типа III………………….34 16. Вопросы для самоконтроля……………………………………………………35 Литература ………………………………………………………………………...36
Введение Кулачковые механизмы – плоские или пространственные механизмы с одной высшей кинематической парой, выполняющие самые разные функции, получили широкое распространение в механизмах перемещения рабочих органов различных машин-автоматов, в устройствах подачи станков, механизмов газораспределения двигателей внутреннего сгорания и во многих других случаях, когда требуется - вращательное или возвратно-поступательное движение ведомого звена по заданному закону. Воспроизведение движения ведомого звена кулачковые механизмы осуществляют теоретически точно. Кулачковый механизм, в большинстве случаев, является составной частью проектируемой машины. Он может использоваться как основной, но чаще является вспомогательным механизмом для выполнения технологической операции, последовательность и продолжительность которой согласуется с движением основного механизма. Проектирование кулачкового механизма заключается в определении взаимного расположения ведущего и ведомого звеньев и координат профиля кулачка, обеспечивающих заданный закон движения ведомого звена. При этом должны быть удовлетворены требования, определяющиеся технологическим процессом и эксплуатационными показателями механизма. Дополнительное условие синтеза – обеспечение допустимых углов давления во всех положениях механизма, то есть обеспечение отсутствия заклинивания кулачкового механизма.
1. Исходные данные, основные требования и этапы проектирования В заданиях на курсовой проект содержатся следующие исходные данные: 1. Структурная схема кулачкового механизма, показывающая характер взаимосвязей звеньев и их относительное расположение, тип кулачка, вид толкателя и характер его движения. 2. Максимальное перемещение толкателя – ход толкателя Smax или максимальный угол поворота толкателя βmax. 3. Фазовые углы: угол рабочего профиля кулачка и его составляющие в соответствии с циклограммой механизма. 4. Закон движения толкателя в виде графика изменения аналога ускорения ведомого звена в зависимости от угла поворота кулачка. 5. Допустимый угол давления 6. Направление вращения кулачка и частота его вращения.
При проектировании кулачковых механизмов необходимо соблюдать следующие основные требования: · проектируемый механизм должен обеспечивать заданный закон движения; · механизм должен иметь наименьшие габариты при достаточной надежности работы. Проектирование кулачкового механизма делится на три основных этапа: 1. Определение кинематических передаточных функций, характеризующих изменение ускорения, скорости и перемещения толкателя в функции времени или угла поворота кулачка. 2. Определение основных размеров кулачкового механизма – минимального радиуса кулачка r0, эксцентриситета е или межосевого расстояния d. 3. Определение координат профиля (профилирование) кулачка.
Типы кулачковых механизмов
Плоские трехзвенные кулачковые механизмы состоят из стойки и двух подвижных звеньев, причем подвижные звенья образуют с ней низшие кинематические пары (вращательные или поступательные), а друг с другом — высшую кинематическую пару. Ведущее звено в кулачковом механизме называют кулачком, ведомое — толкателем. Элемент высшей кинематической пары, принадлежащий кулачку, называют профилем кулачка, а элемент, принадлежащий толкателю, называют профилем толкателя. Рассмотрим типы кулачковых механизмов, представленных в заданиях на курсовое проектирование.
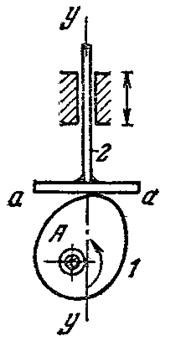
а б в Рис. 1
Кулачковый механизм типа I (рис.1, а) состоит из кулачка 1, толкателя 2 иролика 3. Кулачок, действуя на ролик, свободно вращающийся вокруг оси, заставляет толкатель двигаться поступательно в направляющих С-С. Если центр вращения кулачка лежит на продолжении прямолинейной траектории точки В толкателя, то кулачковый механизм называют центральным. Если же центр вращения не лежит на этой прямой, то кулачковый механизм называют внецентренным. Расстояние е от центра вращения кулачка до траектории точки В толкателя называют эксцентриситетом. Кулачковый механизм типа II (рис. 1, б) называется коромысловым. Кулачок 1 вращается с заданной угловой скоростью Кулачковый механизм типа III (рис. 1, в) состоит из кулачка 1 и плоского (тарельчатого) толкателя 2. Толкатель совершает прямолинейное возвратно-поступательное движение и касается кулачка во время движения различными точками своего прямолинейного профиля аа.
|
||||||
|
|
Последнее изменение этой страницы: 2016-04-08; просмотров: 277; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.147.205.30 (0.009 с.) |

 .
.
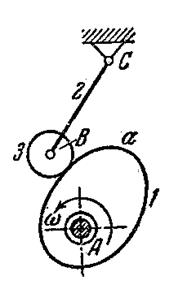
 . Действуя на ролик 3, кулачок 1 заставляет коромысло 2 вращаться вокруг оси С. Расстояние ВС = l называют длиной коромысла. Буквой d обозначают расстояние АС между центрами вращения кулачка и толкателя.
. Действуя на ролик 3, кулачок 1 заставляет коромысло 2 вращаться вокруг оси С. Расстояние ВС = l называют длиной коромысла. Буквой d обозначают расстояние АС между центрами вращения кулачка и толкателя.


