
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Угловая скорость – определяет быстроту изменения угла поворота:
Вектор угловой скорости тела, совершающего вращение вокруг неподвижной оси, направлен вдоль оси вращения так, что если смотреть ему навстречу вращение будет против часовой стрелки.
где "n"– число оборотов в мин. [об/мин], 1об = 2p рад,
Угловое ускорение тела:
Вектор углового ускорения также направлен вдоль оси вращения. При ускоренном движении совпадает по направлению с угловой скоростью и противоположно при замедленном вращении.
Частные случаи вращения тела:
1) Равномерное вращение: w = const, j = w t, w = j / t,
2) Равнопеременное вращение: w = w 0 + e t; здесь начальный угол j0=0.
Скорости и ускорения точек вращающегося тела в векторнойформе.
Скорость любой точки твердого тела, вращающегося вокруг неподвижной оси, равна векторному произведению вектора угловой скорости тела на радиус–вектор этой точки:
Модуль векторного произведения:
V = w × r × sin (a)= w × (CM), (СМ) – расстояние от точки М до оси вращения. Направлен вектор скорости по касательной к окружности, по которой перемещается точка М, в сторону вращения.
Формулы Эйлера:
где wx, wy, wz – проекции вектора угловой скорости.
Проекция вращательной (окружной) скорости: Vx = w y z – w z y; Vy = w z x – w x z; Vz = w x y – w y x.
Если ось вращения совпадает с осью z, то Vx = – w y; Vy = w x. Ускорение:
Касательное ускорение
Модуль касательного. ускорения а t = e × r × sin a, направлено по касательной к траектории точки, т.е. параллельно скорости.
Центростремительное (осестремительное) ускорение
Модуль. центростремительного ускорения а n = w 2 × R, направлено по радиусу к оси (центру) вращения.
Модуль полного ускорения:
Угол, между векторами полного и нормального ускорений:
ПЕРЕДАТОЧНЫЙ МЕХАНИЗМ
Передаточный механизм передает движение от одного тела к другому. Параметры движения тел определяются с учетом параметров точек соприкосновения (зацепления) этих тел. На рисунке приведены различные схемы передачи движения от одного тела к другому.
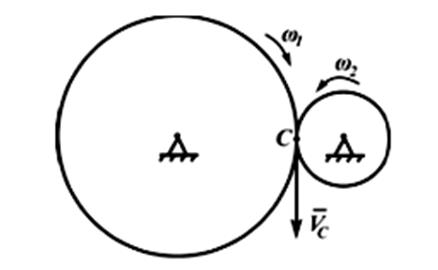
Внешнее зацепление, колёса вращаются в противоположные стороны
Внутреннее зацепление, колеса вращаются в одну сторону
Зависимости угловых скоростей колес определяются из соотношения VC = ω1∙ r1 = ω2∙ r2, т.е. ω1 /ω2 = r2 /r1 Цепная (ременная) передача
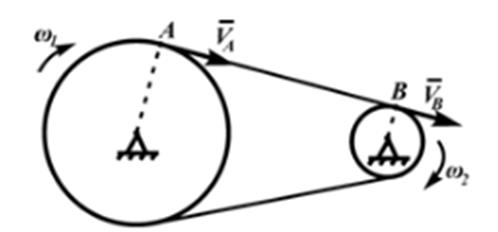
Скорости точек A и B цепи должны быть равны соответственно скоростям точек AB, принадлежащих шкивам:
VA = ω1∙ r1 = VB = ω2∙ r2, ω1 /ω2 = r2 /r1 Поступательное движение стержня обеспечивает вращение колеса
VA = VC = ω ∙ r, ω = VA /r На рисунке ниже изображена фрикционная передача: колесо 1, прижимаясь к торцу колеса 2 в точке C, обеспечивает его вращение вокруг вертикальной оси.
VC = ω1∙ r1 = ω2∙ d, ω1 /ω2 = d/r1 ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
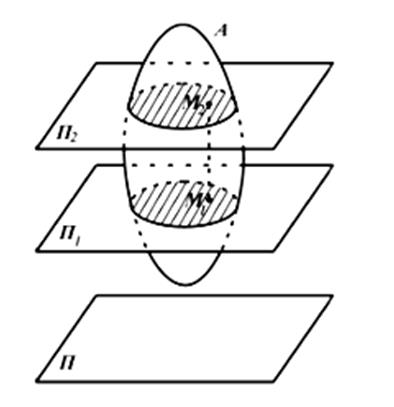
Плоскопараллельным движением твердого тела называется такое движение, при котором все точки тела перемещаются в плоскостях параллельных некоторой неподвижной плоскости. При таком движении точки, лежащие в разных плоскостях на одном отрезке, перпендикулярном неподвижной плоскости (например, M1M2) совершают одинаковые движения.
Отрезок M1M2 движется поступательно. Поэтому изучение плоскопараллельного движения сводится к изучению движения плоской фигуры в какой-то плоскости.
Рассмотрим перемещение пластинки в плоской системе отсчета xOy из одного положения в другое. Такое перемещение можно осуществить двигая пластину поступательно с траекторией точки A с последующим вращательным движением на угол φ вокруг точки A1. Это же перемещение можно выполнить иначе.
Например, перемещая пластинку поступательно с траекторией точки B, с последующим поворотом вокруг B1 на угол φ. Траектории точек A и B различны, а угол поворота в обоих случаях одинаков.
Положение пластинки вполне определяется положением скрепленного с ней отрезка (например, AB), закон движения которого можно задать в виде:
xA= f1(t), yA= f2(t), j = f3(t), точка А называется полюсом.
Плоское движение твердого тела слагается из поступательного движения, при котором все точки тела движутся так же, как полюс (А), и из вращательного движения вокруг этого полюса.
Поступательное перемещение зависит от выбора полюса, а величина и направление угла поворота не зависят.
СКОРОСТЬ ТОЧКИ В ПЛОСКОПАРАЛЛЕЛЬНОМ ДВИЖЕНИИ
При движении фигуры в плоскости положение её точек можно определить соотношением (рисунок):
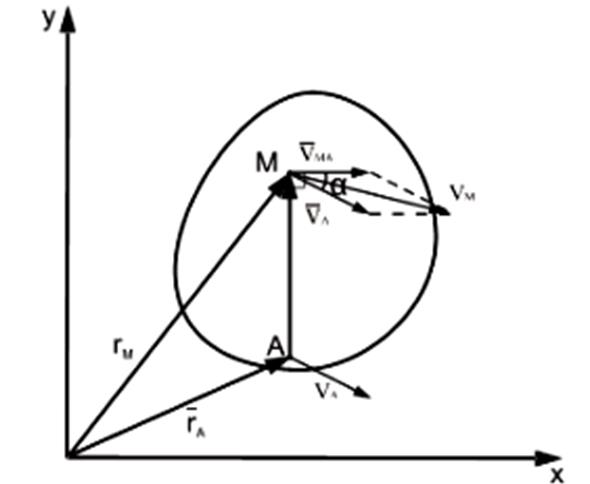
В данном случае точка A является полюсом.
|
||||||||
|
|
Последнее изменение этой страницы: 2021-05-27; просмотров: 116; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.19.58.30 (0.011 с.) |
 , [рад/с].
, [рад/с]. ,
, , [рад/с2].
, [рад/с2]. ,
,

 ,
, .
. ,
, ,
, .
. .
.




 .
.


