
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Дослідження законів розподілу випадкових величин. Моделювання випадкових величин за рівномірним та нормальним законами розподілуСтр 1 из 10Следующая ⇒
СИСТЕМНИЙ АНАЛІЗ Лабораторний практикум для студентів напряму підготовки 6.050101 «Комп‘ютерні науки» Київ 2012 МІНІСТЕРСТВО ОСВІТИ І НАУКИ, молоді та спорту УКРАЇНИ Національний авіаційний університет
СИСТЕМНИЙ АНАЛІЗ Лабораторний практикум для студентів напряму підготовки 6.050101 «Комп‘ютерні науки» Київ 2012 УДК 004:519.87(076.5) ББК А41я7 С 409
Укладачі: М.А. Віноградов, О.В. Колісник, А.С. Савченко
Рецензенти: Л.Н. Беркман – д-р техн. наук, проф., директор Навчально-наукового інституту телекомунікацій та інформатизації Державного університету інформаційно-комунікаційних технологій; Г.М. Розорінов – д-р техн. наук, проф., професор кафедри звукотехніки та реєстрації інформації Національного технічного університету України «КПІ»;
Затверджено на засіданні вченої ради факультету комп’ютерних наук Національного авіаційного університету (протокол № __ від «___» ________ 2012 р.).
Викладено сутність принципів і методів теорії систем, статистичного аналізу процесів функціонування великих систем та методології дослідження операцій і прийняття рішень у великих системах, оптимізації великих систем, побудови математичних моделей об‘єктів і процесів комп‘ютеризації, а також їх аналізу за допомогою теорії систем масового обслуговування. Для студентів напряму підготовки 6.050101 «Комп‘ютерні науки».
ВСТУП
Лабораторні роботи виконуються відповідно до навчальної програми дисципліни «Системний аналіз», яка призначена для студентів напряму підготовки 6.050101 «Комп‘ютерні науки». Мета виконання робіт – набуття студентами практичних навичок та закріплення ними теоретичних знань з аналізу процесів функціонування великих систем та методології дослідження операцій, оптимізації великих систем, побудови математичних моделей об‘єктів і процесів комп‘ютеризації, а також їх аналізу за допомогою теорії систем масового обслуговування. Вивчення матеріалів дисципліни побудовано відповідно до вимог кредитно-модульної системи оцінювання знань. Програмою дисципліни передбачено виконання чотирьох лабораторних робіт у першому модулі і чотирьох робіт у другому. Метою проведення лабораторних робіт є поглиблення та закріплення знань з розділів дисципліни "Основні поняття теорії систем" та "Оптимізація великих систем". У процесі виконання лабораторних робіт студенти знайомляться з методами аналізу й опису великих систем, методологією дослідження операцій, методами оптимізації великих систем. На виконання та захист кожної роботи відводиться 4 академічні години, крім другої роботи першого модуля, на яку заплановано 6 академічних годин. За цей час студент повинен:
- одержати у викладача індивідуальний варіант завдання і виконати його; - зробити висновки щодо лабораторної роботи; - підготувати протокол звіту для лабораторної роботи; - відповісти на контрольні запитання. Звіт про виконання лабораторної роботи має містити: - титульний аркуш; - мету роботи; - стислі теоретичні відомості; - порядок виконання лабораторної роботи; - висновки. До оформлення звіту висуваються такі вимоги: - робота оформлюється на аркушах формату А4, або в окремому зошиті з лабораторних робіт; - на титульному листі мають бути вказані назва дисципліни, тема роботи, ким виконано роботу (ПІБ, номер групи, факультет), ким прийнята робота; - хід роботи повинен містити вхідні дані, отримані результати, висновки. Лабораторний практикум складений на основі матеріалу лекцій, що читаються для студентів напряму підготовки 6.050101 «Комп‘ютерні науки» в Національному авіаційному університеті.
МОДУЛЬ 1. ОСНОВНІ ПОНЯТТЯ ТЕОРІЇ СИСТЕМ Модуль вміщує такі теми: «Предметна область та основні поняття системного аналізу», «Методи системного аналізу», «Системний аналіз бізнес-процесів об‘єктів комп‘ютеризації», лабораторні роботи 1.1 – 1.4. Лабораторна робота № 1.1 Теоретичні відомості Випадковою величиною називається величина, яка в результаті досвіду може прийняти те або інше значення, невідомо заздалегідь – яке саме. Випадкові величини розрізняють дискретного і безперервного типу. Можливі значення безперервних величин не можуть бути заздалегідь перераховані й безупинно заповнюють деякий проміжок.
Законом розподілу випадкової величини є співвідношення, що встановлює зв'язок між можливими значеннями випадкової величини й відповідними їм ймовірностями. Кореляція – статистичний взаємозв'язок двох або декількох випадкових величин (або величин, які можна з деяким припустимим ступенем точності вважати такими). При цьому, зміни однієї або декількох із цих величин приводять до систематичної зміни інший або інших величин. Гістограма – це графічне зображення частоти потрапляння даних у задані інтервали. Центральна гранична теорема це теорема в теорії ймовірностей, яка стверджує, що сума досить великої кількості слабко залежних випадкових величин, що мають приблизно однакові масштаби, має розподіл, близький до нормального. Рівномірний закон розподілу Безперервна випадкова величина має рівномірний розподіл на відрізку [ a, b ], якщо на цьому відрізку щільність розподілу випадкової величини постійна, а поза ним дорівнює нулю.
Якщо
Нормальний закон розподілу Нормальний закон розподілу (розподіл Гауса) є граничним законом, до якого наближаються інші закони розподілу при типових умовах, що часто зустрічаються. Сума досить великого числа незалежних випадкових величин, підлеглим яким завгодно законам розподілу, приблизно підкоряється нормальному закону розподілу й це виконується тем точніше, чим більша кількість випадкових величин підсумуються.
Параметр σ характеризує не положення, а форму кривої розподілу. Це є характеристика розсіювання. При збільшенні σ максимальна ордината зменшується. При зменшенні σ крива розподілу витягається вгору, одночасно стискуючись із боків і стає більш голкоподібною.
Порядок виконання роботи 2.1. Згенерувати випадкові величини з нормальним та рівномірним законах розподілу 2.2. Згенерувати корельовані випадкові величини з експоненціальним та гаусовим законами розподілу 2.3. Побудувати графіки 2.4. Побудувати гістограми для 2.5. Проаналізувати зміни гістограм. 3. Звіт повинен містити результати виконання П. 2.1-2.4, висновки по роботі. гістограми і графіки функції розподілу за нормальним та рівномірним законами ВВ, висновки по роботі. У даній лабораторній роботі необхідно згенерувати випадкові величини з використанням пакету Microsoft Office Excel: – у першому та другому стовпчику – значення випадкових величин (ВВ)
– у третьому та четвертому – значення корельованих ВВ
де ВВ необхідно згенерувати за допомогою Пакета аналізу в меню Сервіс використовуємо команду Аналіз даних (якщо команда відсутня, необхідно загрузити надбудову Пакет аналізу). В пакеті аналізу вибираємо функцію Генерація випадкових величин, де необхідно: вибрати закон розподілу ВВ та встановити наступні параметри: число змінних – 1, кількість ВВ – 100, середнє – 1, відхилення – 0,5. 4. Варіанти Вибрати п’ять значень k для випадкових величин, де коефіцієнт кореляції: – для рівномірного закону розподілу 0,5 < k <1; – для нормального закону розподілу 0 < k <1. Контрольні питання 1. Дати визначення законам розподілу ВВ. 2. Що таке випадкові величини? 3. Визначити властивості рівномірного та нормального законів розподілу. 4. Що таке кореляція? 6. Визначити поняття про центральну граничну теорему. Лабораторна робота № 1.2 Теоретичні відомості Класифікація систем має принципово важливе значення, тому що використовується для побудови математичних моделей (ММ) систем. Класифікація систем Складною системою називається система, в моделі якої недостатньо інформації для ефективного управління цією системою. Таким чином, ознакою простоти системи є достатність інформації для її управління. Якщо ж результат керування, отриманий за допомогою моделі, буде несподіваним, то таку систему відносять до складної. Для переведення системи в розряд простої необхідне отримання відсутньої інформації про неї і включення її в модель. Від складних систем необхідно відрізняти великі системи. Система, для актуалізації моделі якої з метою управління бракує матеріальних ресурсів (машинного часу, ємності пам'яті, інших матеріальних засобів моделювання) називається великою. До таких систем відносяться економічні, організаційно-управлінські, нейрофізіологічні, біологічні тощо системи. За своїми властивостями системи можуть бути класифіковані за такими ознаками: – складні, прості; – динамічні, статичні; – детерміновані, стохастичні; – лінійні, нелінійні; – стаціонарні, нестаціонарні; – дискретні, безперервні. Динамічні системи характеризуються тим, що їх вихідні сигнали в даний момент часу визначаються характером вхідних впливів у минулому і сьогоденні (залежить від передісторії). В іншому випадку системи називають статичними.
Прикладом динамічних систем є біологічні, економічні, соціальні системи; такі штучні системи як завод, підприємства, потокова лінія, тощо. Детермінованою називають систему, якщо її поведінку можна абсолютно точно передбачити. Система, стани якої залежать не тільки від контрольованих, але і від неконтрольованих впливів, або якщо в ній самій знаходиться джерело випадковості, називається стохастичною. Приклад стохастичних систем, це - заводи, аеропорти, мережі і системи ЕОМ, магазини, підприємства побутового обслуговування і т.д. Розрізняють системи лінійні і нелінійні. Для лінійних систем реакція на суму двох або більше різних впливів еквівалентна сумі реакцій на кожне збурювання окремо, для нелінійних - це не виконується. Якщо параметри систем змінюються в часі, то вона називається нестаціонарною, протилежним поняттям є поняття стаціонарної системи. Приклад нестаціонарних систем - це системи, де процеси, наприклад, старіння є на даному інтервалі часу істотними. Якщо вхід і вихід системи виміряється або змінюється в часі дискретно, через крок ∆t, то система називається дискретною. Протилежним поняттям є поняття безперервної системи. Наприклад: – ЕОМ, електронні годинники, електролічильник - дискретні системи; – пісочний годинник, сонячний годинник, нагрівальні прилади тощо - безперервні системи. Методологія системного підходу при вирішенні задач аналізу систем зводиться до того, що дослідження об'єкта орієнтується на розкритті його інтегративних якостей, на виявленні різноманітних зв'язків і механізмів, що забезпечують ці якості. Системний підхід - напрямок методології дослідження, в основі якого лежить розгляд об'єкта, як цілісної безлічі елементів у сукупності відносин і зв'язків між ними, тобто розгляд об'єкта як системи. Лінійним диференціальним рівнянням першого порядку називається рівняння, лінійне відносно невідомої функції та її похідної, яке має вигляд:
Розглянемо найпростіший лінійний електричний ланцюг першого порядку - так званий – RC - ланцюг (рис. 1.5). На вхід ланцюга подається напруга
З урахуванням (1.3) рівняння (1.4) приймає вигляд:
Вплив шуму на систему При дослідженні впливу шуму на дискретну систему, що представлена схемою (рис. 1.7) рівняння системи має вигляд:
де Порядок виконання роботи 2.1. Визначити вихідну напругу:
2.2. Оцінити ефективність функціонування системи при незмінних, заданих вхідних характеристиках системи та при впливі шуму на систему. 2.3. По формулі (2.11) побудувати графік залежності вихідного сигналу 2.4. Побудувати графік залежності для всіх значень 2.5. Дослідити поведінку системи при зміні параметрів RC. 2.6. На підставі отриманих результатів, зробити обґрунтований висновок про стан змодельованої системи. 2.7. Зробити висновки по роботі. 3. Звіт повинен містити результати розрахунків П 2.1-2.4. і графіки залежності П 2.3, 2.4., висновки по роботі. Варіанти Таблиця 1.1
Контрольні питання 1. Визначити класифікацію систем. 2. Що таке складна і велика системи. 3. Дати визначення методології системного підходу. Лабораторна робота № 1.3 Теоретичні відомості Перетворення аналогового сигналу в цифрову форму еквівалентно зміні сигналу. Оскільки цифрову інформацію легше зберігати (з'явилися дешеві та зручні пристрої для зберігання інформації, такі як жорсткі диски комп'ютерів, зовнішні usb накопичувачі або лазерні диски), а також цифрову інформацію легко передавати по сучасних лініях зв'язку практично без втрат. Більшість сигналів мають аналогову природу, тобто змінюються неперервно в часі і можуть набувати будь-яких значень на певному інтервалі. При запису на носій інформації або відтворення з нього сигнал неминуче спотворюється різного роду шумами. Аналоговий сигнал піддається перетворенню за допомогою таких операцій: дискретизація в часі, квантування та кодування. Відновити спотворений сигнал (видалити шуми) не можна. Можна, звичайно, намагатися подавляти шуми, використовуючи деяку додаткову інформацію (наприклад, можна пригнічувати частоти, в яких зосереджені шуми), але при цьому ми втрачаємо також і інформацію про самого сигналі, тобто знову ж вносимо спотворення. Цифрову інформацію можна передати по лінії зв'язку практично без втрат. При передачі сигнал спочатку перетворюється в аналоговий, пересилається, після чого знову цифрується. Якщо лінія зв'язку вносить спотворення в сигнал менше ніж крок квантування, то після передачі і шифрування, отриманий цифрований сигнал не буде відрізнятися від початкового. Помилки квантування інакше називають шумом квантування. Переклад аналогового сигналу в цифровий виконується спеціальними пристроями - аналогово-цифровими перетворювачами (АЦП). Основними параметрами АЦП є частота дискретизації та розрядність АЦП (кількість двійкових розрядів, в яких зберігається значення сигналу, число можливих значень квантування сигналу одно, де - число розрядів). Чим вище розрядність АЦП, з тим більшою точністю можна зберігати сигнал (мало), але тим повільніше він працює (більше). Швидкість, з якою проводиться дискретизація аналогового сигналу по часу, називається частотою дискретизації.– стаціонарні, нестаціонарні; Під дискретизацією сигналів розуміють перетворення функцій неперервних змінних у функції дискретних змінних, за якими вихідні безперервні функції можуть бути відновлені із заданою точністю. Використовується в гібридних обчислювальних системах і цифрових пристроях при імпульсно-кодової модуляції сигналів в системах передачі даних. При дискретизації за часом, безперервний аналоговий сигнал замінюється послідовністю відліків, величина яких може дорівнювати значенню сигналу в даний момент часу. Можливість точного відтворення такого представлення залежить від інтервалу часу між відліками Δt. Згідно з теоремою Котельникова – аналоговий сигнал, що має обмежений спектр може бути встановлений однозначно та без втрати даних (дискретних відліків), взятий з частотою вдвічі більшою за максимальну частоту спектра (F max): fдискр>2*Fmax, де F max – максимальна частота спектра. Під квантуванням розуміють перетворення безперервної за значеннями величини у величину з дискретною шкалою значень з кінцевої безлічі дозволених, які називають рівнями квантування. Очевидно, що чим менше крок квантування, тим менше відрізняється квантований сигнал від істинного. При квантуванні виникає помилка, що розподілена по рівномірному закону:
Дисперсія помилки квантування:
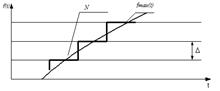
Квантування приводить сигнал до заданих значень, тобто, розбиває за рівнем сигнал (рис. 1.8). Визначають кількість рівнів
де Наступним етапом є визначення розрядності кода В, яким представлені відліки Істотна різниця між квантуванням та дискретизацією (і, відповідно, кроком квантування і частотою дискретизації). При дискретизації сигналу, змінюється в часі (сигнал) заміряється із заданою частотою (частотою дискретизації), таким чином, дискретизація розбиває сигнал за часовою складовою. Квантування ж приводить сигнал до заданих значень, тобто, розбиває за рівнем сигнал. Порядок виконання роботи 2.1. Побудувати функцію (за варіантом). 2.2. Визначити необхідне число рівнів квантування N та величину отриманого рівня (кроку квантування). 2.3. Визначити розрядність коду В. 2.4. Змоделювати квантовану синусоїду та відобразити графік помилки квантування. 3. Звіт повинен містити графік функції, такі розрахунки, як кількість рівнів квантування, дисперсію помилки квантування, висоту рівня квантування, розрядність коду, графіки квантованої функції та помилки квантування, висновки по роботі.
4. Варіанти
Контрольні питання 1. Для чого використовуються квантування неперервного сигналу за рівнем та частотою? 2. Що таке дискретизація? 3. Що таке квантування? Лабораторна робота № 1.4 Теоретичні відомості Опис системи в часовій області не завжди є достатнім. Тому також використовують опис в частотній області. Кожна система працює у своєму частотному діапазоні, тобто реагує на зовнішній вплив в залежності від частот. Наприклад, еквалайзер де весь спектр частот розбивається на окремі частини за допомогою фільтрів. Далі, за допомогою «бігунків» (рис. 1.9) вибирається необхідна частотна характеристика, що складається з фільтрів, які відповідають кожен за свою окрему частоту. Частотна характеристика кожного фільтра повинна бути достатньо «вузькою», щоб виділяти певну частоту.
Подібним чином працює приймач: виділяється певна частота (наприклад, 100 УКВ) інші частоти «заглушаються». В даній лабораторній роботі розглянемо роботу автопілоту (АП) літального апарату (ЛА). На ЛА діють зовнішні сили, які відхиляють від курсу (наприклад, вітер). Вітер відхиляє ЛА від курсу, автопілот повинен своєчасно виявити відхилення та скорегувати ЛА. При впливі поривчастого вітру частотна характеристика автопілоту повинна бути достатньо «вузькою», щоб своєчасно зреагувати на невелике відхилення від курсу. Якщо частотна характеристика буде «широкою», то автопілот на зможе своєчасно виявити відхилення від курсу, в результаті ЛА буде постійно збиватися з курсу. При впливі сильного постійного вітру частотна характеристика автопілоту повинна бути «широкою». Оскільки в іншому випадку автопілот буде реагувати на найменше відхилення від курсу та постійно корегувати політ, в результаті виникне тряска ЛА. Тому при проектування АП необхідно враховувати оптимальну частотну характеристику. Порядок виконання роботи 2.1. За П.1.2, використовуючи програму Excel та дані за варіантом, визначити частотні характеристики 1-ої та 2-ої ланки. 2.2. За П. 1.1, використовуючи програму Excel, визначити загальні частотні характеристики кожного з’єднання. 2.3. Прослідкувати залежність 2.4. Побудувати на одній площині графіки загальних частотних характеристик. Побувати графіки залежності 2.5. Зробити висновки по роботі. 3. Звіт повинен містити результати розрахунків за П.2.1, 2.2, графіки залежності п 2.3, 2.4, висновки по роботі. Варіанти
Контрольні питання 1. Що таке частотна характеристика? 2. Який порядок побудови загальних частотних характеристик кожного з’єднання? 3. Порівняти на скільки відсотків зміниться ширина характеристики в залежності від типу з’єднання (паралельне та послідовне).
МОДУЛЬ 2. ОПТИМІЗАЦІЯ ВЕЛИКИХ СИСТЕМ Модуль складається з наступних тем: «Оптимізація великих систем», «Розкриття невизначеностей та аналіз багатофакторних ризиків», «Аналіз великих систем методами теорії масового обслуговування», «Системне управління складними об‘єктами», лабораторні роботи 2.1 – 2.4. Лабораторна робота № 2.1 Теоретичні відомості Безумовна оптимізація Задача оптимізації формулюється наступним чином: задані множина Х (допустима множина задачі) і функція f (x) (цільова функція), визначена на Х; необхідно знайти точки мінімуму або максимуму функції f на Х. Задача оптимізації, в якій цільову функцію необхідно мінімізувати, має вигляд
Розрізняють необхідні умови оптимальності, тобто умови, яким має відповідати точка, яка є рішенням задачі, і достатні умови оптимальності, тобто умови, з яких випливає, що ця точка є рішенням задачі. Необхідна умова локальної оптимальності для функції однієї змінної. Нехай f (x) диференційована в точці x *∈ R 1. Якщо x * - точка локального оптимуму (екстремуму), то f ′(x *) = 0. (2.1) Точки, що відповідають умові (2.1), називаються стаціонарними. Стаціонарні точки можуть бути точками локального мінімуму, максимуму або перегину. Для визначення характеру стаціонарних точок використовується достатня умова локальної оптимальності. Достатня умова локальної оптимальності. Нехай f (x) k разів (k >1), диференційована в точці x * ∈ R 1, причому f ′(x *) = f ′′(x *) =... = f (k −1) (x *) = 0, f (k) (x *) ≠ 0. Тоді, якщо k − парне число, то x * − точка локального мінімуму при f (k)(x *) > 0 або максимуму при f (k)(x *) < 0. Якщо k − непарне число, то x * − точка перегину. Для функції f (x) багатьох змінних точка x являє собою вектор, f ′(x) − вектор перших часткових похідних функції f (x) (градієнт – Grad f (x)). Необхідна умова локальної оптимальності. Нехай f (x) диференційована в точці x * ∈ Rn. Якщо x * − точка локального екстремуму, то f ′(x *) = 0. Алгоритм визначення точок локальних екстремумів функції багатьох змінних полягає в наступному. 1. Знаходиться f ′(x). 2. Розв‘язується система 3. В результаті обчислюються стаціонарніточки x (i), i =1 ,N. 4. Обчислюється значення функції в цих точках и обирається мінімальне. Приклад. Визначити мінімум цільової функції заданої виразом Рішення. 1. Знаходимо f ′(x), тобто градієнт функції 2. Розв‘язуємо систему: 3. Рішення досягається при стаціонарних точках 4. Значення функції в цих точках Таким чином, мінімум досягається в точці Використовуючи програму Excel, будуємо графік цільової функції спочатку по одній з координат, зафіксувавши другу в районі мінімуму (наприклад,
Порядок виконання роботи 2.1. За П. 1.1. знайти мінімум заданої функції двох змінних виходячи з умови f ¢(x, y)=0. Дані взяти з табл. 2.1. 2.2. Побудувати графік функції з табл. 2.1 поблизу точки екстремуму. 2.3. За П. 1.2. методом покоординатного спуску знайти мінімум заданої функції двох змінних. Пошук почати з точки M 0 (x 0, y 0). Дані взяти з табл. 2.2. 2.4. Побудувати графік функції з табл. 2.2 поблизу точки екстремуму. 2.5. Провести порівняльний аналіз вивчених методів оптимізації. Зробити висновки по роботі. 3. Звіт має містити результати розрахунків по П. 2.1, 2.3, графіки функцій поблизу точки екстремуму по П. 2.2, 2.4, висновки по роботі. Варіанти Таблиця 2. 1
Таблиця 2. 2
Продовження таблиці 2.2
Контрольні питання 1. Назвати необхідну та достатню умову локальної оптимальності функції двох змінних. 2. Пояснити суть оптимізації методом покоординатного спуску. 3. Переваги та недоліки методу покоординатного спуску. 4. Алгоритм знаходження локального мінімуму функції двох змінних при безумовній оптимізації. Лабораторна робота № 2.2 Теоретичні відомості В даній роботі розглянуті лише алгоритми (методи) мінімізації унімодальних функцій, які використовують інформацію лише про значення функції (алгоритми нульового порядку). При рішенні задач використовуються наступні позначення: Δ i = [ ai, bi ] и Li = bi − ai, i = 1, 2, …, − відповідно відрізок локалізації та його довжина після i обчислень значень f (x), Δ0= [ a, b ] та L 0= b − a; N – кількість обчислень значень f (x). Далі розглянуто метод дихотомії, метод Фібоначчі та метод золотого перетину. Для кожного з цих методів на j -й, j =1, 2, …, ітерації розглядається пара точок Метод Фібоначчі Найкращий з точки зору зменшення відрізку локалізації.
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2021-05-27; просмотров: 113; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.14.132.214 (0.153 с.) |
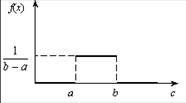 Рис.1.1. Графік щільності рівномірного закону розподілу
Рис.1.1. Графік щільності рівномірного закону розподілу

 функція
функція  та
та  при
при  .
.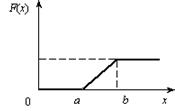 Рис.1.2. Графік функції рівномірного закону розподілу
Рис.1.2. Графік функції рівномірного закону розподілу

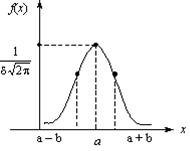 Рис.1.3. Нормальний закон розподілу (закон Гауса)
Рис.1.3. Нормальний закон розподілу (закон Гауса)
 ,
де m – математичне сподівання, σ – середнє квадратичне відхилення величини X.
,
де m – математичне сподівання, σ – середнє квадратичне відхилення величини X.
 Рис.1.4. Нормальний закон розподілу (закон Гауса)
Рис.1.4. Нормальний закон розподілу (закон Гауса)
 де
де  .
. де
де  .
. та
та  змодельовані по експоненціальному та нормальному законами розподілу, що визначаються формулою:
змодельовані по експоненціальному та нормальному законами розподілу, що визначаються формулою:
 – коефіцієнт кореляції,
– коефіцієнт кореляції, 
 такого вигляду:
такого вигляду: (1.1)
(1.1) Рис.1.5. Лінійний електричний ланцюг першого порядку
Рис.1.5. Лінійний електричний ланцюг першого порядку
 (1.2)
(1.2)
 (1.3)
(1.3)
 (1.4)
(1.4)
 (1.5)
(1.5)
 (1.6)
(1.6) Рис.1.7. Схема дискретного сигналу та вплив шуму на нього
Рис.1.7. Схема дискретного сигналу та вплив шуму на нього
 (1.11)
(1.11) – вхідний сигнал;
– вхідний сигнал;  – шум;
– шум;  – вихідний сигнал;
– вихідний сигнал;  – коефіцієнт підсилення шуму;
– коефіцієнт підсилення шуму;  – коефіцієнт підсилення сигналу.
– коефіцієнт підсилення сигналу. та визначити вплив на нього шуму.
та визначити вплив на нього шуму.
 .
.
 квантування за формулою:
квантування за формулою: ,
, - максимальне значення функції;
- максимальне значення функції;  – величина отриманого інтервалу (кроку квантування). З використанням співвідношення, що визначає дисперсію, нескладно визначити крок квантування:
– величина отриманого інтервалу (кроку квантування). З використанням співвідношення, що визначає дисперсію, нескладно визначити крок квантування:  .
. :
:  ;
; 

 від типу з’єднання.
від типу з’єднання. від
від  .
.
 . Побудувати графік функції поблизу точки екстремуму.
. Побудувати графік функції поблизу точки екстремуму. .
.
 ,
,  ,
,  .
. ,
,  .
. ,
,  а
а  змінюється від –2 до 2, (рис. 2.1)), потім при фіксованому
змінюється від –2 до 2, (рис. 2.1)), потім при фіксованому  (рис. 2.2).
(рис. 2.2). Рис. 2.1. Графік функції по
координаті x 1.
Рис. 2.1. Графік функції по
координаті x 1.
 Рис. 2.2. Графік функції по
координаті x 2.
Рис. 2.2. Графік функції по
координаті x 2.




















 и
и  при цьому
при цьому  . Значення функції в цих точках будуть позначатися відповідно
. Значення функції в цих точках будуть позначатися відповідно  та
та  .
.


