Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Автоматика и цифровая электроникаСодержание книги
Поиск на нашем сайте
АВТОМАТИКА И ЦИФРОВАЯ ЭЛЕКТРОНИКА
1.1. Основные понятия и определения автоматики
Автоматическая система предназначена для управления каким-либо процессом без вмешательства оператора (человека). В такой системе функции оператора обычно сводятся к включению системы, наблюдению за ходом процесса, использованию результатов управления и выключению системы. Любая автоматическая система независимо от ее назначения и принципа работы элементов состоит из двух основных частей: объекта управления (ОУ) и управляющего устройства (УУ). Процесс управления заключается в том, что управляющее устройство целенаправленно воздействует на объект управления для достижения запланированного результата. Очевидно, данный процесс не может осуществляться без передачи информации от одной части системы к другой. Более того, характер обмена информацией определяет основные особенности устройства таких систем, поэтому автоматические системы относят к информационным системам. Автоматические системы объединяет одно общее свойство: их автоматизм обеспечен и ограничен заранее заложенной в них программой действия, заранее заложенной информацией, движущейся в одном направлении — к исполнительному органу. В таких системах отсутствуют контроль за изменением состояния объекта управления и учет этих изменений в процессе управления. В реальных системах на объект управления действуют заранее непредвиденные возмущения, называемые помехой. Помехи могут появиться при изменении внешних условий (температура, влажность, характеристики электромагнитных полей, вибрация и т. д.) или внутреннего состояния системы (нестабильность источников питания, люфт движущихся деталей и т. п.). Если влияние помех достаточно велико, то рассмотренные выше разомкнутые системы становятся неработоспособными. В этих случаях используются замкнутые автоматические системы, в которых управляющее воздействие z (t) вырабатывается на основе информации об отклонении регулируемой величины y (t) от требуемого значения x (t), т. е. z (t) является функцией рассогласования: z (t)= F [ x (t) - y (t)]. В замкнутых системах в управляющем устройстве проводится сравнение фактического y (t) и заданного х(t) значений выходной величины и устанавливается функциональная связь между получившимися рассогласованием и новым управляющим воздействием, т. е. образуется непрерывный замкнутый цикл движения сигналов (информации). При этом целью работы системы является минимизация функции рассогласования. Характер функции F определяется конкретной системой, но в любой системе при совпадении фактического и заданного значений выходной величины, т. е. при x (t) - y (t) = 0, значение функции F и управляющего воздействия z (t) равно нулю. Сигналы, поступающие с выхода (объект управления) на вход системы (управляющее устройство), называются сигналами обрат ной связи, а цепь, по которой они поступают, — цепью обратной связи. Поэтому замкнутые системы также называют и системами с обратной связью, а разомкнутые — системами без обратной связи. Автоматические устройства используются не только в автоматических системах управления, действующих без вмешательства оператора (человека), но и в автоматизированных системах управления (АСУ), в которых главное место отводится человеку. В таких системах автоматы участвуют в процессах получения, переработки и предъявления информации человеку-оператору (или коллективу операторов), который принимает окончательное решение и передает его как входную информацию следующим цепочкам автоматов, наилучшим образом выполняющих эти решения. К таким системам относятся, в частности, и автоматизированные системы обучения (АСО).
Информация. Общие понятия
Информация несет в себе широкое понятие и используется для объяснения сущности разнообразных явлений и процессов. Расширилась трактовка понятия информации, которая в настоящее время предусматривает обмен сведениями между: - человеком и человеком; - человеком и автоматом; - автоматом и автоматом. Широкое использование информации вызвало необходимость в ее исследовании, что привело к созданию теории информации — самостоятельного раздела кибернетики, и разработке математического аппарата, отражающего основные свойства информации. Определилась и получила всеобщее признание количественная мера информации. За единицу информации принимается количество информации, содержащееся в случайной величине, принимающей с равной вероятностью два различных значения (например, 0 и 1). Эта единица информации называется двоичной единицей и носит наименование «бит» (сокращение bit от англ. binary digit — двоичная цифра). Измерение информации в двоичных единицах особенно удобно для применения в различных областях техники, так как в системах, хранящих и перерабатывающих информацию, проще всего оперировать с величинами, выраженными в двоичной системе счисления, а одна двоичная единица есть как раз количество информации, необходимое для указания одной двоичной цифры. Информация, представленная в двоичных единицах, нашла широкое применение в различных областях техники: в связи, в вычислительных машинах, в системах управления технологическими процессами. Управление технологическими процессами (объектом) основывается на информации о параметрах, которые их характеризуют (давление, температура, скорость и т. п.), значения которых заранее неизвестны и непостоянны во времени. Информация об этих параметрах собирается с помощью датчиков и передается непосредственно или после некоторой обработки в управляющее устройство, которое на основании программы управления вырабатывает команды, воздействующие на объект управления через исполнительные органы. В системе автоматического управления могут происходить процессы передачи информации, процессы сбора, передачи, обработки и хранения информации. Количество информации, циркулирующее в системе автоматического управления, зависит от сложности объекта (процесса) и от необходимой точности управления. Чем больше количество информации перерабатываемой системой, тем больше возможностей у системы в смысле управления, однако тем сложнее ее аппаратура. Информация может быть дискретной или непрерывной. Дискретность (прерывистость) информации, как правило, связана с характером отдельных параметров процесса (например, двигатель включен или выключен), либо с необходимостью иметь грубое представление о том или ином параметре (например, «напряжение в пределах нормы» и «за пределами нормы»). Непрерывное получение и передача информации, различной по характеру и объему, диктуется требованиями управляемого процесса и определяется возможностью ее передачи, т. е. пропускной способностью канала связи. Для передачи информации по каналу связи ее следует преобразовать в условные сигналы (систему символов) — код. Однако даже кодируемая информация может быть искажена помехами, наводимыми в канале связи. Для исключения этого явления строят помехоустойчивый код путем введения в него проверочных сигналов. В автоматическом управлении передаваемая информация кодируется посредством набора комбинаций из электрических импульсов и пауз между ними, что эквивалентно изображению значений кодируемой непрерывной величины в виде двоичных чисел.
Кодирование информации
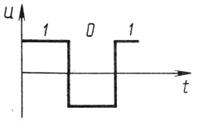
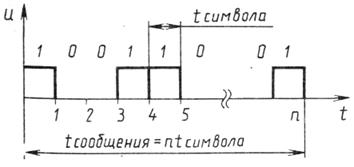
Представление сообщений в виде комбинации из небольшого числа исходных знаков (точка, тире и пауза в коде Морзе) называется кодированием информации. Число разных символов (знаки, элементы, сигналы), используемых при кодировании, называется основанием кода, а число элементов, образующих кодовую комбинацию, — значностью кода. Код, все комбинации которого имеют одинаковую значность, называется равномерным. Например: - телеграфный код Морзе имеет основание, равное трем (точка, - почтовый адресный код на конвертах писем имеет основание, равное десяти (цифры от 0 до 9), и является равномерным, Как видно из примеров, кодирование позволяет представить различные сообщения в стандартной форме, имеющей некоторые свойства чисел. В самом деле, кодированный сигнал, так же как и число, дискретен и составляется из ограниченного набора элементов. Поэтому кодированные сигналы принято называть цифро выми сигналами. Наиболее простым является код с основанием, равным двум, например цифры 0 и 1 в двоичной позиционной системе счисления, состояния «включен» и «выключен» в термостате с биметаллическим регулятором и т. д. При этом различным символам кода могут соответствовать импульсы с разной амплитудой. Обычно символу 1 соответствует положительный импульс напряжения, а символу 0 — отрицательный (или отсутствие) импульса в соответствии с рисунком 7.
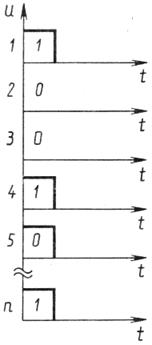
Рисунок 7 В двоичных символах можно закодировать и передать любую информацию. Кодированное сообщение, состоящее из нескольких символов, может быть представлено в последовательной или параллельной форме. При последовательном представлении импульсы сообщения формируются поочередно в одной цепи в соответствии с рисунком 8, а при параллельном—одновременно в разных цепях в соответствии с рисунком 9.
Рисунок 8
Рисунок 9 Из всех видов электрических сигналов отдают предпочтение цифровым сигналам. Происходит это из-за необходимости обеспечить чрезвычайно высокую надежность современных автоматических систем. Ведь от их безаварийной работы зависят благосостояние, здоровье, а то и жизнь миллионов людей, занятых на производстве, пользующихся общественным транспортом, да и просто живущих рядом с предприятиями. Среди разных типов элементов, из которых можно собирать автоматические устройства и большие системы, наилучшими эксплуатационными параметрами и наибольшей надежностью обладают цифровые элементы, т. е. элементарные устройства, работающие с цифровыми сигналами. Повышенная помехоустойчивость цифровых сигналов и цифровых устройств объясняется дискретностью уровней цифровых сигналов. В любой электрической цепи под действием внешних и внутренних причин возникают всевозможные помехи. Поэтому выходной сигнал будет определяться не только известной функциональной зависимостью от входного сигнала, но еще и непредсказуемыми случайными помехами. В сложных аналоговых системах даже незначительные отклонения в отдельных элементах могут привести к накоплению погрешностей, что явится причиной неустойчивой работы всей системы. Случайный характер отклонения сигнала в аналоговой системе не позволяет при передаче искаженного сигнала от одного элемента к другому определить уровень ошибки и отделить ее от полезного сигнала. Каждый следующий элемент, реагирующий на «ошибочный» сигнал, добавит к нему свою ошибку, и искажение сигнала растет от входа к выходу системы, подобно снежному кому. В устройствах, работающих с дискретными сигналами, накопление погрешностей можно предотвратить. Возмем шаг квантования
ЭЛЕМЕНТЫ АВТОМАТИКИ
Классификация датчиков
Многообразие датчиков, применяемых в автоматике, вызывает необходимость их классификации. Известны следующие типы датчиков, которые наиболее целесообразно классифицировать по входной величине, практически соответствующей принципу действия и указаны в таблице 1. Таблица 1
Электрические датчики в зависимости от принципа производимого ими преобразования делятся на два типа — модуляторы и генераторы. У модуляторов (параметрические датчики) энергия входа воздействует на вспомогательную электрическую цепь, изменяя ее параметры и модулируя значение и характер изменения тока или напряжения от постороннего источника энергии. Одновременно усиливается сигнал, поступивший на вход датчика (наличие постороннего источника энергии является обязательным условием работы датчиков-модуляторов в соответствии с рисунком 28).
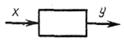
Рисунок 28 Модуляция осуществляется с помощью изменения одного из трех параметров — омического сопротивления, индуктивности и емкости. В соответствии с этим различают группы омических, индуктивных и емкостных датчиков. Каждая из этих групп может делиться на подгруппы. Группа омических датчиков разделена на подгруппы: тензорезисторы, потенциометры, терморезисторы, фоторезисторы. Ко второй подгруппе относятся варианты индуктивных датчиков, магнитоупругие и трансформаторные. Третья подгруппа объединяет различного типа емкостные датчики. Второй тип — датчики-генераторы являются просто преобразователями и представлены в соответствии с рисунком 29. Они основаны на возникновении электродвижущей силы под влиянием различных процессов, связанных с контролируемой величиной. Возникновение электродвижущей силы может происходить, вследствие электромагнитной индукции, термоэлектричества, пьезоэлектричества, фотоэлектричества и других явлений, вызывающих разделение электрических зарядов.
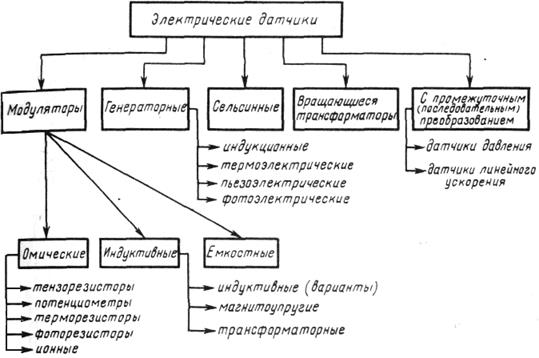
Рисунок 29 Общая схема классификации основных датчиков по выходной электрической величине представленна в соответствии с рисунком 30.
Рисунок 30 Датчики-модуляторы.
Омические датчики
Тензометрические датчики
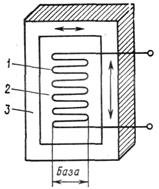
К датчикам с изменяющимся омическим сопротивлением относятся тензометрические датчики, которые применяются для измерения упругих деформаций (измерения растяжения или сжатия тел), а также для измерения крутящих и изгибающих моментов, возникающих на поверхности различных механических деталей при их механической нагрузке. Тензодатчики, используемые в автоматическом контроле, дают возможность следить за деформациями и напряжениями при статических и динамических нагрузках. Основным элементом проволочного тензодатчика является константановая проволока диаметром 0,015-0,05 мм, сложенная в виде петлеобразной решетки (спирали) между двумя склеенными полосками тонкой бумаги или пленки, что и видно в соответствии с рисунком 31.
Рисунок 31 Датчик 1 через специальную бумагу 2 приклеивается к детали 3, деформацию которой нужно измерить. Относительное изменение сопротивления тензодатчика D R / R = D Kl / l где К — коэффициент относительной чувствительности (в пределах упругой деформации проволоки величина постоянная); l — начальная длина деформируемого участка проволоки. Для тензодатчиков, выпускаемых промышленностью, используется константановая или фехралевая проволока. Тензочувствительность таких датчиков может иметь значения от 1,7 до 2,9, сопротивление составляет 50—2000 Ом, база — 5—30 мм, номинальный рабочий ток при наклейке на металлические детали — 30 мА, допустимые относительные деформации — не более 0,3% (при большей деформации проволока оборвется), максимальная рабочая температура составляет 500°С (для датчиков с пленочной основой). Достоинство проволочных тензодатчиков: - простота конструкции; - практически безынерционность. Недостаток — малая чувствительность (при работе сопротивление тензодатчика изменяется не более чем на 0,3%).
Потенциометрические датчики
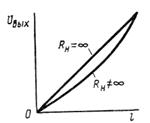
Потенциометрические датчики (реостаты) применяются для измерения угловых или линейных перемещений и преобразования этой величины в изменение сопротивления. Конструктивно датчики такого типа представляют собой каркас прямоугольной или кольцевой формы, на который намотана в один ряд тонкая проволока. По виткам проволоки скользит щетка, называемая движком потенциометра, которая механически связана с объектом, перемещение которого нужно измерить. От концов намотки и от движка сделаны электрические выводы, с помощью которых датчик включают в схему. Сопротивление между движком и одним из выводов намотки называют выходным сопротивлением датчика RB ЫХ. При перемещении щетки в пределах одного витка R ВЫХ не изменяется, что обусловливает зоны нечувствительности, а при переходе щетки с одного витка на другой RBbIX изменяется скачком. Для уменьшения скачков и зон нечувствительности при намотке используют тонкий провод (диаметром 0,03—0,05 мм). С целью снижения влияния температуры на RВЫХ применяют провод с малым температурным коэффициентом сопротивления (нихром, константан, манганин). Наиболее часто применяют линейные потенциометры, у которых сечение каркаса по всей длине одинаково, а намотка равномерная. За счет этого выходное сопротивление датчика RВЫХ линейно зависит от перемещения l в соответствии с рисунком 32, т. е. R ВЫ X = Cl, где С — коэффициент пропорциональности (рис. 7.4).
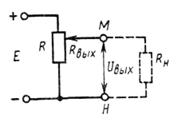
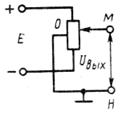
Рисунок 32 Существует несколько вариантов включения потенциометрических датчиков. В соответствии с рисунком 33 питающее напряжение Е подводится к выводам намотки (М — Н).
Рисунок 33 Для линейного потенциометра выходное напряжение U вых = (E / R) R вых. Для удобства использования данной формулы примем E / R = К — коэффициент датчика. При подключении к датчику нагрузки RH из-за ее шунтирующего действия линейная зависимость выходного напряжения от перемещения движка потенциометра нарушается. Чтобы нарушение линейности было незначительным, должно быть RH >> R (в 20 раз и более). Применяются также потенциометрические датчики с выводом от средней точки в соответствии с рисунком 34.
Рисунок 34 При перемещении движка в одну сторону от средней точки на выходе датчика появляется напряжение положительной полярности, а при перемещении в другую сторону от средней точки — отрицательной полярности. По полярности выходного сигнала можно судить о направлении перемещения. Достоинство потенциометрического датчика: - высокая точность преобразования; - простота конструкции; - возможность питания постоянным и переменным током; - безынерционность. Термометрические датчики
Термометрические датчики (термисторы) или терморезисторы, предназначены для измерения температуры путем преобразования измеряемого сигнала в изменение активного сопротивления. Термисторы бывают металлические и полупроводниковые. Металлические термисторы изготовляются из чистых металлов с большим температурным коэффициентом сопротивления (медь, платина). Диапазон измеряемых температур для платиновых термисторов от минус 200 до 600°С, а для медных от минус 50 до 150°С. Точность измерения платиновых термисторов ±0,1°С, медных до ± 1°С. При более высоких температурах термисторы не применяются, так как в диапазоне высоких температур они имеют недостаточную точность и сильно окисляются. Зависимость сопротивления металлических термисторов почти линейная: Rt = Ro [1 + a (t - to)], где a — температурный коэффициент сопротивления; R о — сопротивление при t о, Ом; t о — начальная температура, °С; t — измеряемая температура, °С. Линейность статической характеристики в других диапазонах температур нарушается. В зависимости от назначения термисторы имеют различную конструкцию. Они изготовляются в виде нити, спирали, катушки и т. д. Термисторы нашли широкое применение для температурного контроля обмоток различных исполнительных механизмов (электродвигателей, катушек и т. д.). Термисторы имеют один существенный недостаток: они обладают большой инерционностью. Постоянная времени термисторов изменяется от единиц до десятков секунд и зависит от диаметра провода. Полупроводниковые термисторы изготовляются из окиси различных металлов (марганца, меди, никеля, титана и др.). Они имеют отрицательный температурный коэффициент сопротивления, что означает, что с увеличением температуры сопротивление полупроводника уменьшается. Наиболее широко полупроводниковые термисторы применяют в диапазоне температур от минус 100 до 120°С. В сравнении с металлическими полупроводниковые термисторы обладают большей чувствительностью и меньшей инерционностью. У них высокое внутреннее сопротивление, что позволяет не учитывать сопротивление соединительных проводов. Недостатками полупроводниковых термисторов являются: - узкий диапазон температур; - нелинейность статической характеристики; - разброс параметров между отдельными экземплярами. Термисторы нашли широкое применение в измерительной технике.
Фоторезисторные датчики
Фоторезисторные датчики, или фотосопротивления, нашли широкое применение в системах автоматики для контроля с любым видом передаваемой информации: - сигнализации; - измерения; - регистрации. Фотосопротивления — это полупроводники, у которых число свободных электронов и электропроводность увеличиваются при освещении. Для фотосопротивлений применяется сернистый свинец (PbS), сернистый висмут (Bi2S2) и сернистый кадмий (CdS). Конструкция фотосопротивлений весьма проста. Тонкий слой полупроводникового материала наносится на прозрачную пластинку, к которой прикрепляются электроды, осуществляющие контакт с полупроводниковым слоем. При подаче к электродам электрического напряжения через полупроводник пойдет ток, сила которого зависит от освещенности светочувствительной поверхности. Зависимость тока от освещенности называется световой характеристикой фотосопротивления. Ионные датчики представляют разнообразную подгруппу датчиков, у которых входная величина функционально связана с током ионной проводимости, а следовательно, и с омическим сопротивлением, которое обусловлено наличием ионов. С током ионной проводимости приходится преимущественно встречаться в жидких и газообразных средах. На принципе действия ионных датчиков разработаны и применяются устройства с ядерными излучениями для измерения толщины, плотности и массы материалов, толщины покрытий, уровней самых различных материалов вплоть до расплавленных металлов, расхода жидкостей и газов, газового анализа и др.
Индуктивные датчики.
Индуктивные датчики нашли широкое применение в системах автоматики для измерения линейного или углового перемещения. Принцип действия их основан на изменении индуктивности катушки с магнитопроводом при перемещении якоря. Простой принцип действия позволил создать целый ряд конструкций датчика. В соответствии с рисунком 35 индуктивный датчик с подвижным якорем представляет собой катушку 2 с ферромагнитным сердечником и с подвижным якорем 1.
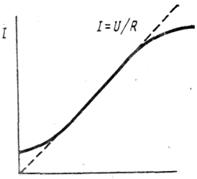
Рисунок 35 При перемещении якоря 1 датчика воздушный зазор изменяется, а следовательно, изменяется и индуктивность катушки 2. Ток в катушке датчика I = U / Z = U где U — напряжение питания; Z — полное сопротивление катушки; R — активное сопротивление катушки; При постоянных U, R и f ток катушки зависит только от ее индуктивности, а следовательно, от воздушного зазора. Таким образом, ток в катушке датчика пропорционален воздушному зазору, т. е. I = KS, где К — коэффициент пропорциональности или чувствительности датчика. Реальная характеристика индуктивного датчика отличается от идеальной (показана пунктиром ) наличием некоторой нелинейности в соответствии с рисунком 36.
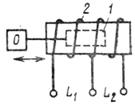
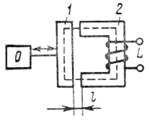
Рисунок 36 В соответствии с рисунком 37 индуктивный датчик с подвижным сердечником представляет собой катушку с подвижным ферромагнитным сердечником 1.
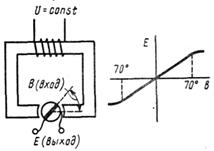
Рисунок 37 От средней точки обмотки сделан вывод, который позволяет создать измерительную схему. Когда сердечник находится в центре катушки, то в силу симметрии L 1 = L 2. При перемещении сердечника, например, вправо, индуктивность правой половины катушки L 2 увеличивается, а левой L 1 уменьшается. По изменению этих индуктивностей можно измерить значение перемещения сердечника. Эти датчики применяют для измерения значительных перемещений — до 50 мм. Статическая характеристика линейная. Магнитоупругие датчики относятся к подгруппе индуктивных датчиков, так как принцип действия их основан на свойстве ферромагнитных материалов изменять магнитную проницаемость при упругих деформациях, вызываемых механической нагрузкой. Индуктивность же катушки прямо пропорциональна магнитной проницаемости магнитопровода катушки. Получается цепь последовательных преобразований: механическая сила — механическая напряженность — магнитная проницаемость — индуктивность. Магнитоупругие датчики применяются для измерения больших усилий. Трансформаторные датчики имеют на своем выходе взаимоиндуктивность, и поэтому их также можно отнести к подгруппе индуктивных датчиков. Они отличаются от индуктивных датчиков тем, что используют на выходе явление электромагнитной индукции, однако это явление носит вспомогательный характер и используется для модулирования изменений напряжений на выходе. Наиболее распространенным типом трансформаторного датчика, получившим широкое применение в телемеханике для передачи на расстояние показаний различных приборов, является датчик с поворотной катушкой, называемой также индукционным преобразователем в соответствии с рисунком 38.
Рисунок 38 Катушка датчика изготовлена в виде рамки, пронизываемой переменным магнитным потоком, который создается обмоткой возбуждения, подключенной к источнику стабилизированного напряжения стандартной частоты. При повороте катушки меняется значение пронизывающего ее магнитного потока, а следовательно, и индуктированной ЭДС. С помощью полюсных наконечников можно получить прямолинейную статическую характеристику при повороте рамки на ±70° от нейтрального положения. Соединяя механической связью ось рамки с осью стрелки показывающего прибора, можно преобразовать показания прибора в электрическое напряжение. Достоинством всей подгруппы индуктивных датчиков являются: - отсутствие скользящих контактов; - высокая чувствительность; - сравнительная простота конструкции. Недостатком всей подгруппы индуктивных датчиков являются: - возможность работы только на переменном токе; - трудность получения пулевого значения напряжения на выходе датчика; - необходимость предохранения от помех. Динамические свойства датчиков зависят от инерционности подвижных частей.
Емкостные датчики.
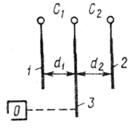
Емкостные датчики предназначены для преобразования измеряемой неэлектрической величины в изменение емкости. Датчик представляет собой плоский конденсатор с изменяемой емкостью. Емкость плоского конденсатора C = e S / d, где e — абсолютная диэлектрическая проницаемость среды между пластинами; S — площадь пластин; d — расстояние между пластинами. Изменяя e, S и d, можно получить три типа емкостных датчиков. Емкостный датчик с переменным расстоянием между пластинами содержит две неподвижные пластины 1 и 2 и подвижную пластину 3, которая механически связана с измеряемым объектом в соответствии с рисунком 39.
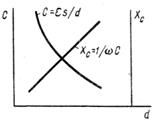
Рисунок 39 Когда d 1 = d 2, то C 1 = C 2. При перемещении подвижной пластины 3 влево, d 1 уменьшается, a d 2 — увеличивается. Из-за этого емкость между пластинами 1 и 3 увеличивается, а емкость между пластинами 2 и 3 уменьшается. По изменению этих емкостей можно измерить линейное перемещение объекта (практически до 0,1 мм). Статической характеристикой такого датчика является гипербола, что не очень удобно для измерения перемещения. Применяя такой тип датчика, следует учитывать не емкость, а реактивное емкостное сопротивление Хс = 1/(w C) = d / (w e S), которое прямо пропорционально расстоянию между пластинами, т. е. перемещению. Для него статическая характеристика будет прямолинейна в соответствии с рисунком 40.
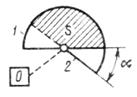
Рисунок 40 Емкостный датчик с поворотными пластинами, в соответствии с рисунком 41, представляет собой воздушный конденсатор, у которого одна группа пластин 1 неподвижна (обычно через одну пластину), а другая— может поворачиваться на некоторый угол a.
Рисунок 41 При a = 0 площадь перекрытия пластин S (заштрихована) наибольшая, поэтому емкость С между подвижными и неподвижными пластинами наибольшая. При повороте подвижных пластин на угол a площадь перекрытия и емкость датчика уменьшаются. Такие датчики применяются для измерения углов поворота от 0 до 180°. Емкостный датчик с переменной диэлектрической проницаемостью, в соответствии с рисунком 42, представляет собой конденсатор с переменным диэлектриком.
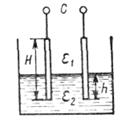
Рисунок 42 При разных величинах диэлектрической проницаемости воздуха e 1 и перемещаемого диэлектрика e 2 образуются два параллельно соединенных конденсатора, общая емкость которых C = C 1 + C 2 = e 1 bH d + (e 2 - e 1) Rb / d, где b — ширина пластин. Отсюда видно, что при перемещении диэлектрика, т. е. при изменении уровня жидкости, изменяются перемещение h и емкость датчика С. По изменению емкости С определяют перемещение h. Такие датчики применяются для измерения уровня жидкости. На принципе изменения диэлектрической проницаемости строятся также датчики для измерения влажности материалов, что позволяет автоматизировать это измерение, занимающее много времени при лабораторном его выполнении с помощью сушильных шкафов Принцип действия датчика основан на влажности измеряемого материала, влияющей на диэлектрическую проницаемость. Достоинства емкостных датчиков: - высокая чувствительность; - простота; - малая инерционность. Недостатки емкостных датчиков: - сильное влияние возможных побочных емкостей и посторонних электрических полей (необходима экранировка); - значительное влияние температуры (изменяются размеры пластин) и влажности (изменяется e воздуха) окружающей среды.
3.5. Датчики с промежуточным преобразованием
Широко распространенная группа датчиков, применяемая в тех случаях, когда входную величину не удается непосредственно преобразовать в электрическую величину. В этом случае осуществляется двукратное последовательное преобразование. Элемент, осуществляющий первое преобразование, называется чувствительным элементом. Наибольшее применение в этой группе нашли датчики давления и датчики линейных ускорений.
Датчики давления Датчики давления преобразуют давление жидкости или газа в электрическую величину. У многих датчиков чувствительный элемент преобразует давление в перемещение, которое затем преобразуется в электрический сигнал. В качестве чувствительных элементов используют мембраны и сильфоны. В соответствии с рисунком 43 мембрана представляет собой тонкую пластинку, которая укрепляется на конце трубопровода.
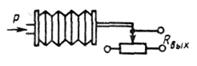
Рисунок 43 Под действием давления жидкости или газа жесткий центр мембраны прогибается перемещая, например, движок потенциометра. Это перемещение изменяет выходное сопротивление датчика. В соответствии с рисунком 44 сильфон представляет собой тонкостенную гофрированную трубку из упругого материала.
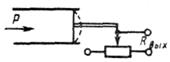
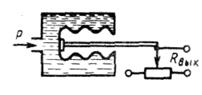
Рисунок 44 Под действием давления газа сильфон растягивается, перемещая, например, движок потенциометра. В результате изменяется выходное сопротивление датчика. В соответствии с рисунком 45 при измерении давления жидкостей применяется другая конструктивная схема сильфонного датчика.
Рисунок 45 Жидкость под давлением р поступает в полость сильфона, который, сжимаясь, перемещает движок потенциометра.
Датчики линейных ускорений
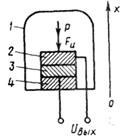
Датчики линейных ускорений (акселерометры). Акселерометры преобразуют линейное ускорение в электрическую величину. В соответствии с рисунком 46 один из вариантов акселерометра преобразует ускорение в усилие, измеряемое затем пьезоэлектрическим датчиком (1 — кopпус датчика).
Рисунок 46 Кварцевая пластина 3 наклеивается на основание 4, а сверху к кварцевой пластинке с помощью токопроводящего клея приклеивается пластинка 2, называемая чувствительным элементом. Ось ОХ, перпендикулярная плоскости кварцевой пластины, называется осью чувствительности акселерометра. Акселерометр устанавливается на подвижном объекте. Когда объект движется с ускорением а вдоль оси ОХ, на чувствительный элеме<
|
||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2021-04-04; просмотров: 585; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.137 (0.016 с.) |

 А больше удвоенного значения максимально возможного случайного отклонения сигнала а, возникающего из-за внешних или внутренних помех:
А больше удвоенного значения максимально возможного случайного отклонения сигнала а, возникающего из-за внешних или внутренних помех: 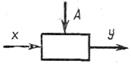
 ,
, = 2 p fL — индуктивное сопротивление катушки; f — частота напряжения питания; L — индуктивность катушки, зависящая от воздушного зазора.
= 2 p fL — индуктивное сопротивление катушки; f — частота напряжения питания; L — индуктивность катушки, зависящая от воздушного зазора.